

2. Исходные данные для расчета системы:
Таблица 1
|
Позиция |
Элементы системы |
Передаточные функции |
Параметры |
|
000 |
Газопламенная печь (ОР) |
|
|
|
010 |
Датчик разности давлений (РТ) |
|
|
|
015 |
Фильтр помех (Ф) |
|
|
|
050 |
Регулятор (R) |
1. ПИ-регулятор
2. ПИД-регулятор
|
|
|
060 |
Серводвигатель (ИУ) |
|
|
|
070 |
Жалюзи (ИО) |
|
|
В результате, система с регулятором должна удовлетворять следующим показателям качества:
Время
регулирования -
![]() ;
;
Перерегулирование
-
![]() ;
;
Установившаяся
ошибка -
![]()
3. Предварительный расчёт
3.1. Структурная схема системы и математическая модель
Для исследования системы необходимо получить её математическую модель, которую можно получить на основе структурной схемы (рис. 1.1.).
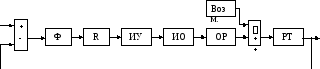
Рис 1.1. Структурная схема системы регулирования
На структурной схеме:
Газопламенная
печь -
![]() ,
,![]()
![]()
Датчик
разности давлений -
![]() ,
,![]() ;
;
Фильтр
помех -
![]() ,
,![]() ;
;![]() ;
;
Регулятор (R)
1.
ПИ-регулятор
![]() ;
;
2.
ПИД-регулятор
![]() ;
;
Серводвигатель
(ИУ) -
![]() ,
,![]() ,
,![]() ;
;
Жалюзи
(ИО) -
![]() ,
,![]() .
.
Передаточная функция возмущения - ,,.
В случае наличия звена запаздывания в передаточной функции объекта применяем разложение в ряд Тейлора, которое имеет следующий вид:
e-s = = ( 1 + (-1) n ns / n!);
n=1
e-s =1-1s
Используем это разложение до коэффициента n =1, чтобы не перегружать систему лишними малыми постоянными времени, получим:
Wоу (s) = 1.4 / (50s+1) ;
![]() ;
;
Примечание: На схеме, приведённой ниже, значение передаточной функции W0(s) есть сумма передаточных функций звена собственно объекта управления Wоу(s) и звена запаздывания Wзап(s). При расчёте регулятора мы для простоты расчётов используем модель системы без учёта запаздывания.
М атематическая
модель тогда будет выглядеть так: (см.
рис.1.2.)
атематическая
модель тогда будет выглядеть так: (см.
рис.1.2.)
рис.1.2. Математическая модель системы регулирования
3.2. Анализ исходной системы
Для определения характеристик исходной системы проведём её статический расчёт.
Передаточная функция разомкнутой системы
 ;
;
=> ![]() ;
;
2) Передаточная функция замкнутой системы по заданию
 .
.
Проведём анализ устойчивости системы по критерию Гурвица:
Для системы четвертого порядка характеристическое уравнение имеет вид
![]() .
.
Условием устойчивости по Гурвицу является положительность всех коэффициентов характеристического уравнения и выполнение неравенства
![]() >
>![]() .
.
![]() >
>![]()
5202>409
Неравенство выполняется, следовательно, система устойчива.
Построим ЛАЧХ и ФЧХ разомкнутой системы (рис. 1.3.)

Рис.1.3. ЛЧХ разомкнутой системы
Из
рисунка видно, что система устойчива,
следовательно, алгебраический расчёт,
проведённый по критерию Гурвица проведен
верно, в нашей системе запас по фазе
составляет
![]() .
.
Построим переходный процесс исходной замкнутой системы (см. рис 1.4.)
Время регулирования tрег = 338.9429 с
Перерегулирование % =38.79%
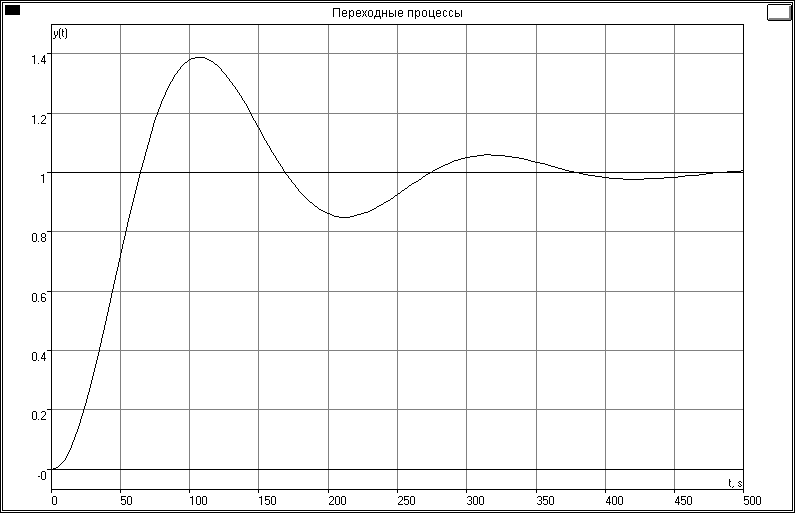
Рис1.4. Переходной процесс замкнутой системы
3) Посчитаем установившиеся ошибки по заданию и возмущению
a) Передаточная функция ошибки по заданию
 .
.
![]() установившаяся
ошибка по заданию будет равна
установившаяся
ошибка по заданию будет равна
![]()
б) Передаточная функция ошибки по возмущению
 .
.
![]() установившаяся
ошибка по возмущению будет равна
установившаяся
ошибка по возмущению будет равна
![]()
Анализируя полученные данные об исходной системе, можно сделать вывод, что она не отвечает всем статическим и динамическим показателям качества, которые были определены в задании (например, большое время регулирования tр = 338.9429 с, перерегулирование % = 38.79% ). Для получения лучших показателей качества надо ввести в систему регулятор, который должен обеспечить необходимые характеристики и показатели.