

Статокинетические рефлексы 64
Когда возникают статокинетические рефлексы регуляции позы? Можно разделить на две группы: 65
При прямолинейном движении66
при горизонтальных перемещениях (головы) – вперёд-назад, вправо-влево.
При вертикальных перемещениях - подъёме и спуске (лифтные 67)
При приземлении
При вращательном движении68
В чём выражаются статокинетические рефлексы регуляции позы?
При прямолинейном движении69
подъёме и спуске
при подъёме – в сгибании и последующем разгибании головы, туловища и конечностей
при спуске – в разгибании и последующем сгибании головы, туловища и конечностей
при приземлении – в принятии конечностями положения, способного поддержать тяжесть тела при встрече с землёй
При вращательном движении – в изменении тонуса мышц головы и глаз (нистагм), а также туловища и конечностей.70
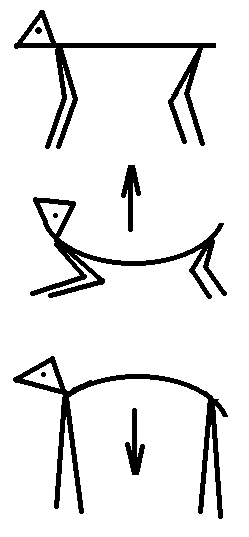
Подъём и спуск = вертикальные перемещения туловища сопровождаются лифтными рефлексами. При резком опускании вниз у животного появляется готовность к прыжку. У человека — выпрямление ног. Приземление — сгибание ног. Аналогичные явления наблюдаются при при быстром подъёме вверх в кабине лифта. Начало подъёма сопровождается сгибанием, а остановка — разгибанием ног и туловища.
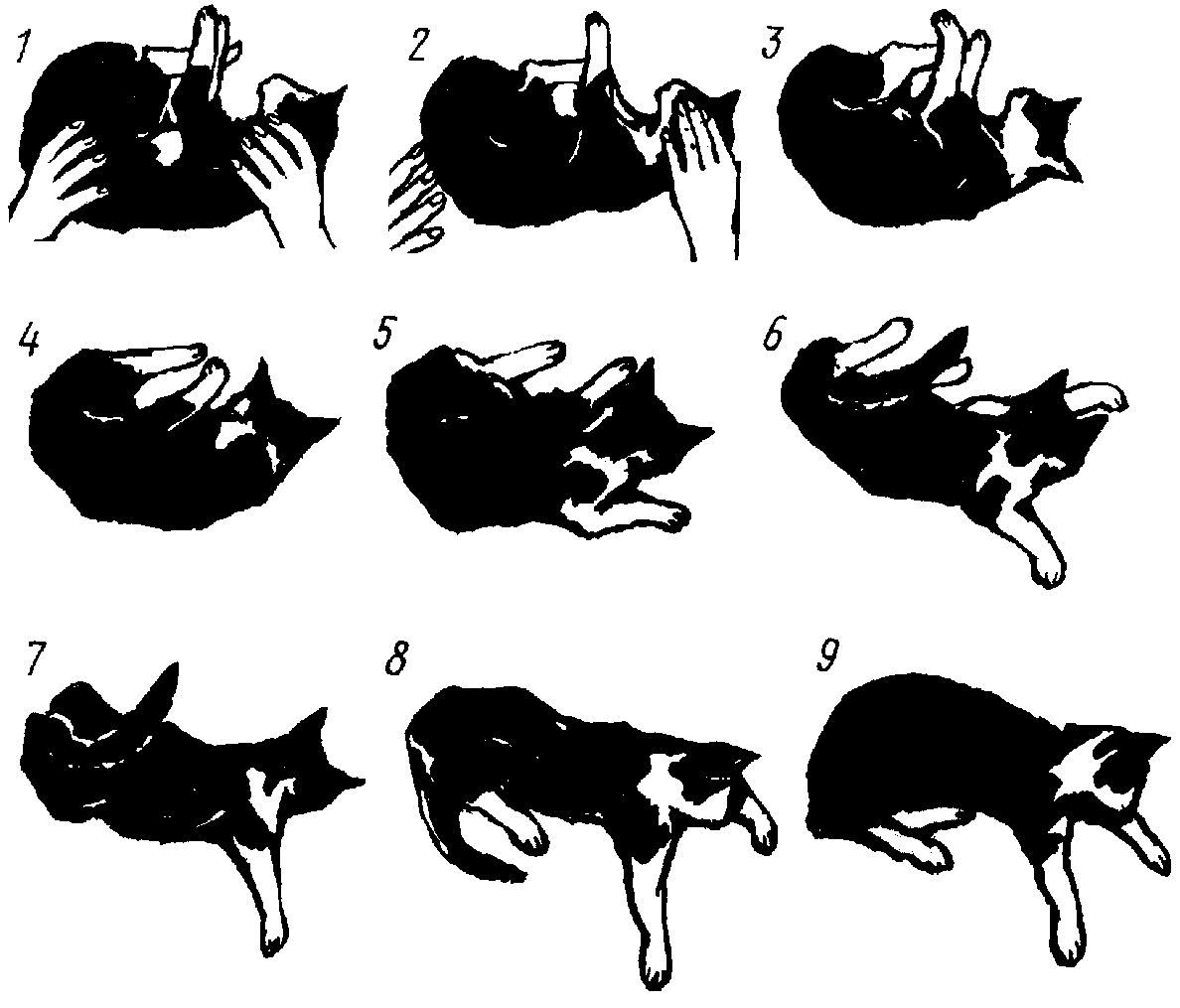
Описанные установочные рефлексы легко наблюдать на нормальной кошке, которая свободно падает из положения на спине (рис. II—35).
Прежде всего активируются лабиринтные рефлексы на голову, благодаря которым она поворачивается по направлению к нормальному положению.
К этой реакции присоединяется шейный установочный рефлекс, когда тело следует за головой, сначала грудной отдел и только затем таз. Происходит своего рода штопорообразное движение животного в пространстве, начинающееся с головы, происходит также разгибание передних конечностей. Дальнейшее прямолинейное смещение головы в пространстве при свободном падении вызывает разгибание конечностей. Последнее можно объяснить лабиринтным рефлексом на прогрессивное движение. Благодаря совокупному действию этих рефлексов голова и тело кошки принимают нормальное положение, конечности тонически разгибаются и готовы принять вес тела, когда животное достигнет земли.
С каких рецепторов возникают статокинетические рефлексы регуляции позы? Лабиринтов.
При прямолинейном движении – отолитов и полукружных каналов 71
При вращательном движении –полукружных каналов 72
Раздражителями лабиринтных рецепторов являются угловые и линейные ускорения. Угловые ускорения воспринимаются полукружными каналами, а линейные — отолитовыми органами.
Какими отделами ЦНС обеспечиваются статокинетические рефлексы регуляции позы? Средним и продолговатым мозгом.
Положение тела и головы в пространстве и по отношению друг к другу принадлежит к наиболее застрахованным и автоматически выполняемым реакциям ЦНС. 73
Стато-кинетические и статические реакции взаимно дополняют друг друга: благодаря кинетическим реакциям выполняются движения, приводящие отдельные части тела в такое положение, в котором они потом удерживаются статическими рефлексами. 74
Благодаря взаимной деятельности большого количества разнородных рефлексов осуществляется единая конечная цель. 75
Одна из основных задач «позной» деятельности мышц — удержание нужного положения звеньев тела в поле силы тяжести (удержание головы от свисания, голеностопных суставов от тыльного сгибания при стоянии и др.). 76
Поза также может выражать эмоциональное состояние (угрожающая, спокойная поза и др.).
Кроме того, «позная» активность может быть направлена на фиксацию суставов, не принимающих участия в осуществляемом движении. В трудовой деятельности удержание позы бывает связано с преодолением внешних сил.
У млекопитающих животных и человека поддержание позы и фазические движения обеспечиваются одними и теми же мышцами.77 Специализированные тонические мышцы отсутствуют.78
Отличие заключается в том, что в позный режим работы мышц вовлекаются преимущественно низкопороговые, медленные, устойчивые к утомлению двигательные единицы. 79
При позной деятельности сила сокращения мышц обычно невелика, режим близок к изометрическому, длительность сокращения значительна. 80
Кроме того, «позная» активность может быть направлена на фиксацию суставов, не принимающих участия в осуществляемом движении. В трудовой деятельности удержание позы бывает связано с преодолением внешних сил.
Типичный пример позы — стояние человека.
Поддержание равновесия при стоянии — только частный случай «позной» активности.
Сохранение равновесия при стоянии возможно в том случае, если проекция центра тяжести тела находится в пределах опорного контура, т. е. площади, занимаемой на плоскости опоры стопами (рис. 4.20).
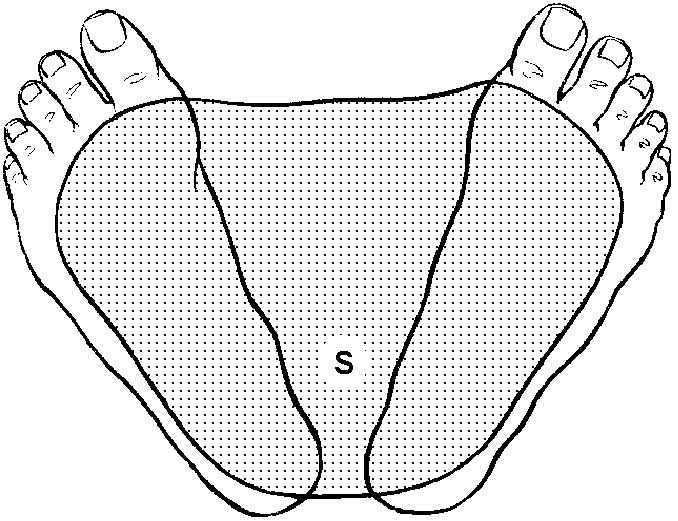
Рис. 4.20. Площадь опоры тела в удобной стойке. S — точка, соответствующая проекции общего центра тяжести тела.
Вертикаль, опущенная из общего центра тяжести тела, при стоянии проходит несколько впереди оси голеностопных и коленных суставов и несколько позади оси тазобедренных. Следовательно, на эти суставы действуют моменты сил тяжести вышерасположенных звеньев тела, а это делает необходимым для удержания позы стояния напряжение многих мышц туловища и ног. Развиваемая этими мышцами сила невелика.
Стопа в целом имеет три точки опоры: пяточный бугор и головки I и V плюсневых костей.81
Максимальное напряжение при стоянии развивают мышцы голеностопного сустава, меньшее — мышцы коленного и тазобедренного суставов. У большинства мышц активность поддерживается на более или менее постоянном уровне. Другие, например передняя большеберцовая мышца, активируются периодически. Последнее обусловлено небольшими колебаниями центра тяжести тела, постоянно происходящими при стоянии как в сагиттальной, так и во фронтальной плоскостях. Эти колебания могут быть зарегистрированы специальным прибором — стабилографом, работающим с помощью тензодатчиков (рис. 4.21). Мышцы голени противодействуют отклонениям тела, возвращая его в вертикальное положение.
Таким образом, поддержание позы — это активный процесс, осуществляющийся, как и движение, с участием обратных связей от рецепторов.
В поддержании вертикальной позы участвуют зрение и вестибулярный аппарат. Важную роль играет проприорецепция.
Поза стояния у человека энергетически относительно экономна, так как моменты силы тяжести невелики вследствие близости проекции тяжести тела к осям основных суставов ног. Менее экономно стояние у многих животных, например у кошки и собаки, которые стоят на полусогнутых конечностях.
Механизмы поддержания равновесия используются также при локомоции и повседневной двигательной деятельности.
Например, быстрое движение руки может вызывать нарушение равновесия. Обычно этого не происходит, потому что произвольному движению предшествуют такие изменения в системе регуляции позы, которые заранее изменяют распределение «позной» активности мышц и тем самым обеспечивают нейтрализацию последствий движения — так называемые позные компоненты произвольного движения. Эта упреждающая «позная» активность осуществляется автоматически с очень короткими центральными задержками. Роль упреждающей активности в стабилизации положения звеньев тела можно проиллюстрировать простым примером: студент удерживает на ладони вытянутой руки учебник физиологии. Если его товарищ внезапно снимет эту книгу с ладони, то рука резко подпрыгнет вверх, если же студент сам снимет книгу свободной рукой, то ладонь останется на прежнем уровне.

Рис. 4.21 Записи колебаний тела человека в сагиттальной (А) и фронтальной (Б) плоскостях при стоянии (стабилограммы). Отметка времени — 5 с.