

3.1.2 Скорость и ускорение точки
1
При векторном способе задания движения
скорость
![]() –
вектор, направленный по касательной к
траектории в сторону движения точки и
приложенный в этой точке, который равен
первой производной радиус-вектора по
времени:
–
вектор, направленный по касательной к
траектории в сторону движения точки и
приложенный в этой точке, который равен
первой производной радиус-вектора по
времени:
![]() (3.7)
(3.7)
Ускорение
![]() –
вектор, направленный в вогнутую сторону
траектории, равный первой производной
по времени от вектора скорости или
второй производной по времени от
радиус-вектора точки:
–
вектор, направленный в вогнутую сторону
траектории, равный первой производной
по времени от вектора скорости или
второй производной по времени от
радиус-вектора точки:
![]() (3.8)
(3.8)
2 При координатном способе задания движения, когда, в частности, декартовые координаты x, y, z – известные функции времени, сначала определяются проекции скорости на соответствующие декартовые оси
![]() (3.9)
(3.9)
затем – модуль и направляющие косинусы вектора скорости
 (3.10)
(3.10)
Декартовые проекции, модуль и направляющие конусы вектора ускорения определяются по формулам:
 (3.11)
(3.11)
![]() (3.12)
(3.12)
3
При естественном способе задания
движения скорость и ускорение определяются
по их проекциям на естественные оси,
начало которых находится в движущейся
точке, а
![]() –
направляющие орты (рис. 3.5). При этом
скорость точки определяется как
алгебраическая величина
–
направляющие орты (рис. 3.5). При этом
скорость точки определяется как
алгебраическая величина
![]() (3.13)
(3.13)
Скорость точки как векторную величину можно представить в виде
![]() (3.14)
(3.14)
Ускорение определяется про формулам:
![]() (3.15)
(3.15)
Рис. 3.5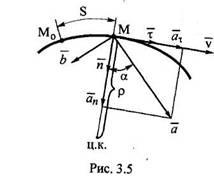 Здесь
Здесь
![]() –
единичный вектор касательной,
–
единичный вектор касательной,
![]() –
единичный вектор главной нормали,
–
единичный вектор главной нормали,
![]() –
единичный вектор бинормали,
–
единичный вектор бинормали,
![]() –
соответственно касательное и нормальное
составляющие полного ускорения, причем
–
соответственно касательное и нормальное
составляющие полного ускорения, причем
![]() ,
– радиус кривизны траектории для т. M,
– направляющий угол полного ускорения.
Таким образом, движение точки исследуется
в подвижной ортогональной системе
координат, начало которых находится в
самой движущейся т. M,
а их направления определяются ортами
,
– радиус кривизны траектории для т. M,
– направляющий угол полного ускорения.
Таким образом, движение точки исследуется
в подвижной ортогональной системе
координат, начало которых находится в
самой движущейся т. M,
а их направления определяются ортами
![]() В
силу такого выбора системы координат
третьей составляющей ускорения
не
будет, т.е.
В
силу такого выбора системы координат
третьей составляющей ускорения
не
будет, т.е.
![]() 1.
В этом заключается существенное отличие
естественного способа задания движения
точки от задания её движения в декартовой
системе координат. Естественный способ
задания движения часто используется
при исследовании криволинейного движения
точки и особенно – движений точек
вращающихся тел.
1.
В этом заключается существенное отличие
естественного способа задания движения
точки от задания её движения в декартовой
системе координат. Естественный способ
задания движения часто используется
при исследовании криволинейного движения
точки и особенно – движений точек
вращающихся тел.
3.1.3 Частные случаи движения точки
1 Равномерное прямолинейное движение. При этом а = 0 (а = 0, аn = 0, = ), v = const и закон движения определяется по формуле:
S = So + vt (3.16)
где So = S(0).
2 Равномерное криволинейное движение. При этом а = аn, a = 0, v = const, уравнение движения описывается выражением (3.16).
3 Равномерное движение по окружности. При этом а = аn = const, a = 0, v = const. Отсюда следует, что = const. Траекторией движения точки является дуга окружности, так как радиус кривизны только окружности есть = R = const (R – радиус окружности). Закон движения имеет также вид (3.16).
4 Переменное прямолинейное движение. При этом а = а, аn= 0, так как = . Тогда
![]() (3.17)
(3.17)
5
Переменное криволинейное движение.
![]() В этом случае
В этом случае
![]() (3.18)
(3.18)
В выражениях (3.17) и (3.18) знак (+) принимается в случае равноускоренного движения, знак (–) – равнозамедленного движения точки.