

Механика (тмм)/Динамика механизмов/Кинетостатический (силовой) расчет механизмов
Главный вектор сил инерции R и главный момент сил инерции L0 точек звена, совершающего ускоренное вращательное движение вокруг оси, не проходящей через центр масс, удовлетворяют соотношениям:
R=0, L0=0
R0, L0=0
R=0, L00
R0, L00
Главный вектор сил инерции R и главный момент сил инерции L0 точек звена, равномерное прямолинейное поступательное движение, удовлетворяют соотношениям:
R=0, L0=0
R0, L0=0
R=0, L00
R0, L00
Главный вектор сил инерции R и главный момент сил инерции L0 точек звена, совершающего ускоренное прямолинейное поступательное движение, удовлетворяют соотношениям:
R=0, L0=0
R0, L0=0
R=0, L00
R0, L00
Главный вектор сил инерции R и главный момент сил инерции L0 точек звена, совершающего равномерное вращательное движение вокруг оси, не проходящей через центр масс, удовлетворяют соотношениям:
R=0, L0=0
R0, L0=0
R=0, L00
R0, L00
Главный вектор сил инерции звена, совершающего поступательное движение, направлен ...
противоположно направлению ускорения звена
в ту же сторону, что и ускорение звена
противоположно направлению скорости звена
в ту же сторону, что и скорость звена
Силовой расчет механизмов методами кинетостатики основан на применении ...
принципа Даламбера
принципа возможных перемещений
уравнения Лагранжа второго рода
теоремы об изменении кинетической энергии
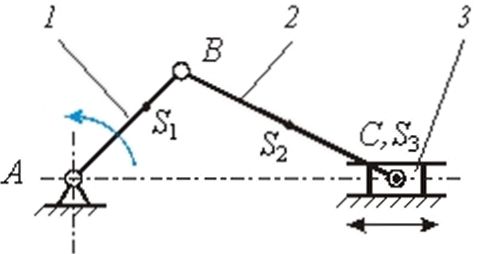
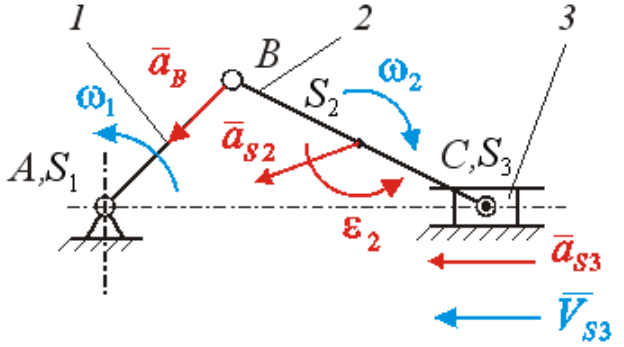 Модули
главного вектора Fи
и главного момента Ми
сил инерции ползуна 3 кривошипно-ползунного
механизма (см. рисунок) определяются
зависимостями … (Js3
– момент инерции ползуна 3 относительно
оси, проходящей через центр масс S3
перпендикулярно плоскости чертежа; m3
– масса ползуна 3; угловая скорость
кривошипа 1 постоянна, 1=const)
Модули
главного вектора Fи
и главного момента Ми
сил инерции ползуна 3 кривошипно-ползунного
механизма (см. рисунок) определяются
зависимостями … (Js3
– момент инерции ползуна 3 относительно
оси, проходящей через центр масс S3
перпендикулярно плоскости чертежа; m3
– масса ползуна 3; угловая скорость
кривошипа 1 постоянна, 1=const)
Fи=0; Mи=0
Fи=m3·aS3; Mи=0
Fи=m3·aS3; Mи=JS3·VS3
Fи=m3·VS3; Mи=0
Модули главного вектора Fи и главного момента Ми сил инерции шатуна 2 кривошипно-ползунного механизма (см. рисунок) определяются зависимостями … (Js2 – момент инерции шатуна 2 относительно оси, проходящей через центр масс S2 перпендикулярно плоскости чертежа; m2 – масса шатуна 2; угловая скорость кривошипа 1 постоянна, 1=const)
Fи=0; Mи=0
Fи=m2·aS2; Mи2=0
Fи=m2·aS2; Mи2=JS2·2
Fи=m2·VS2; Mи=0
Механика (тмм)/Динамика механизмов/Уравновешивание механизмов, вращающихся звеньев (роторов)
Укажите ротор, имеющий статическую неуравновешенность
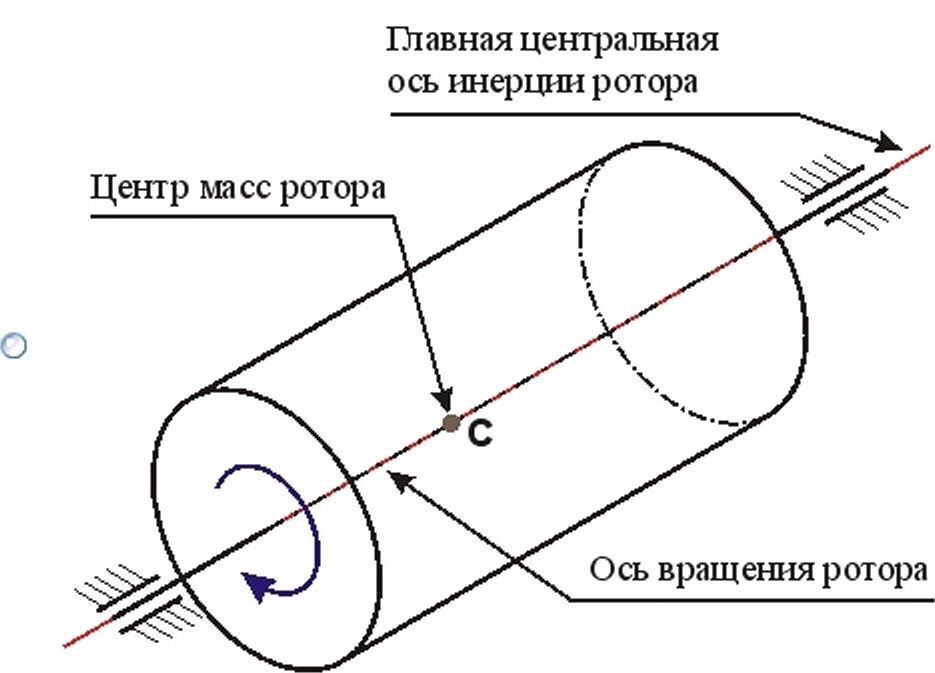
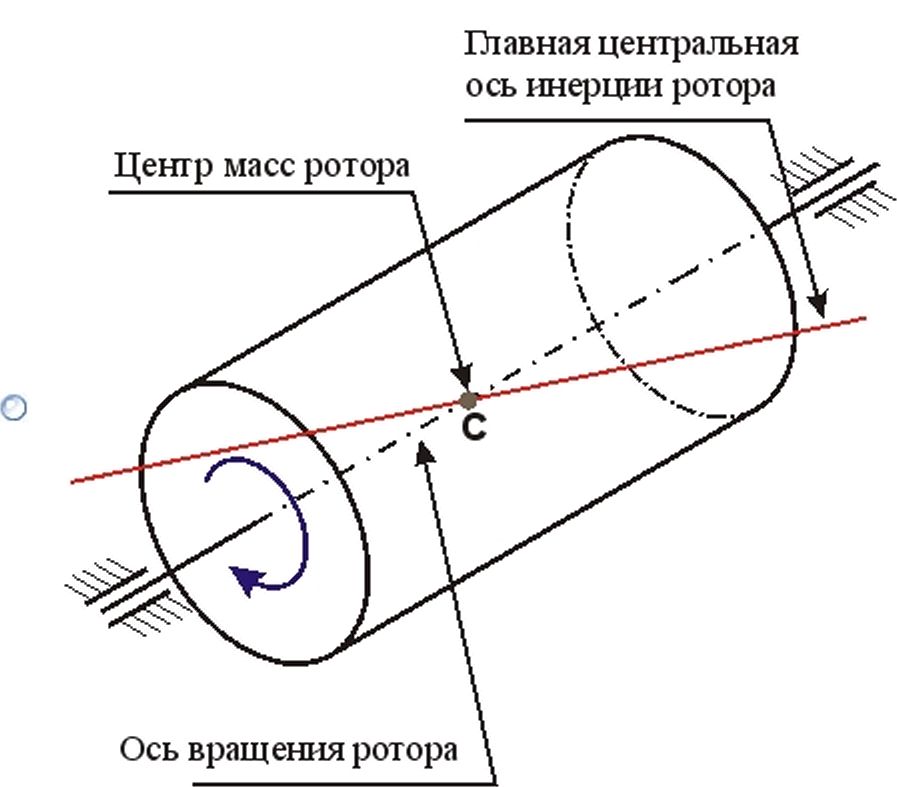

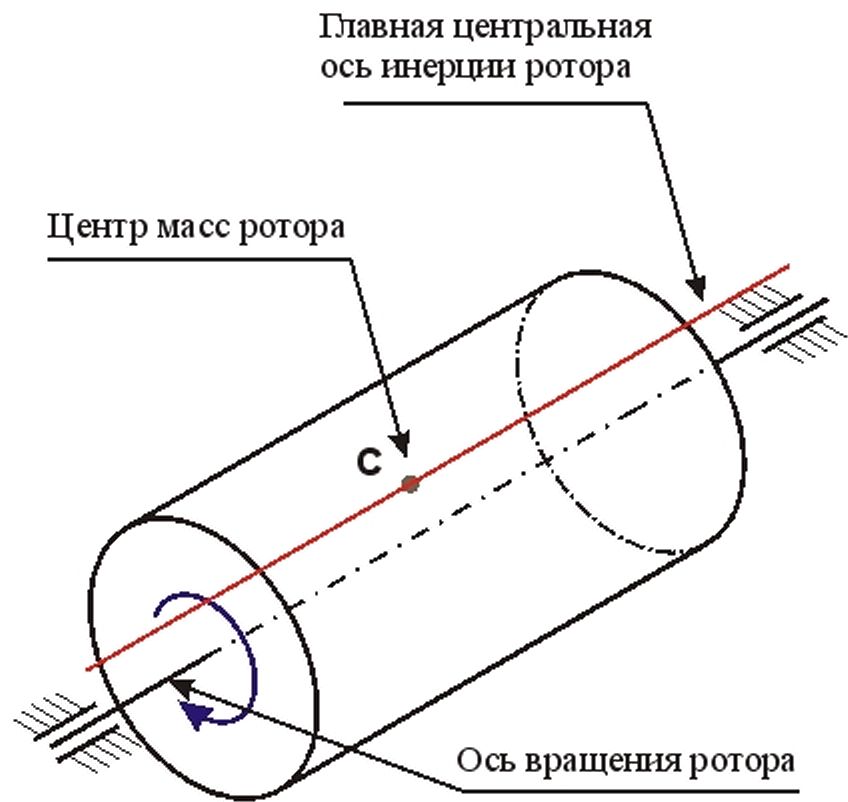
Укажите ротор, имеющий динамическую неуравновешенность
Укажите ротор, имеющий моментную неуравновешенность
Укажите ротор, имеющий полную уравновешенность
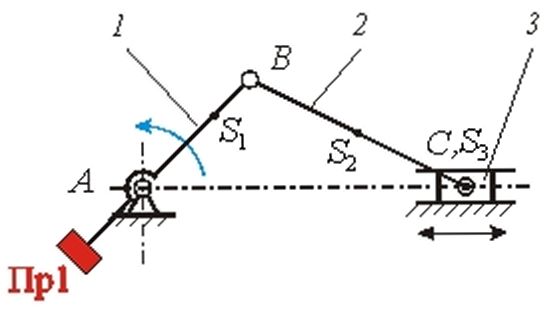
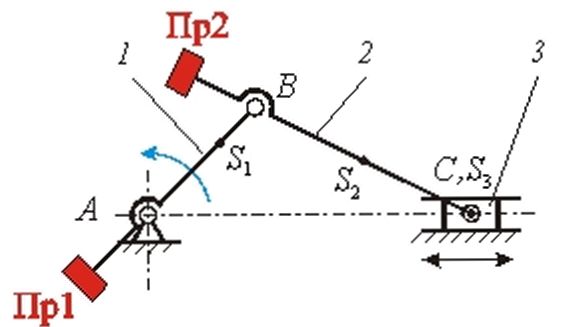
 Кривошипно-ползунный
механизм имеет три подвижных звена,
центры масс которых обозначены S1
S2, S3 соответственно.
Укажите схему расположения противовесов
Прi, которая позволяет осуществить
полное статическое уравновешивание
масс механизма.
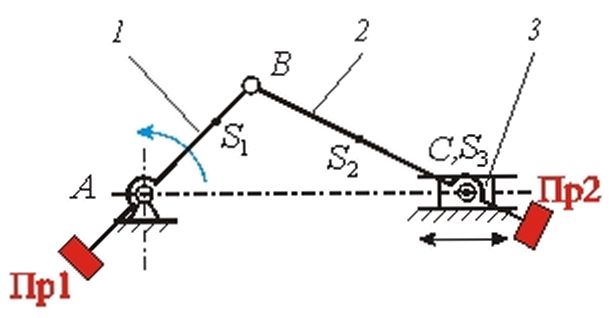
Кривошипно-ползунный
механизм имеет три подвижных звена,
центры масс которых обозначены S1
S2, S3 соответственно.
Укажите схему расположения противовесов
Прi, которая позволяет осуществить
полное статическое уравновешивание
масс механизма.
Статическим уравновешиванием вращающегося звена называется ...
распределение масс вращающегося звена, при котором главные центральные оси инерции не пересекают ось вращения звена
распределение масс вращающегося звена, совмещающее одну из его главных центральных осей инерции с осью вращения
распределение масс вращающегося звена, при котором одна из его главных центральных осей инерции располагается параллельно оси вращения
распределение масс вращающегося звена, переводящее его центр масс на ось вращения
 На
рисунке приведена структурная схема
кривошипно-ползунного механизма
компрессора. Коэффициент неравномерности
движения этого механизма определяется
по формуле ...(1max,
1min,
1ср -
максимальное, минимальное и среднее
значения угловой скорости начального
звена за цикл движения механизма;...(
1max, 1min,
1ср -
максимальное, минимальное и среднее
значения углового ускорения начального
звена за цикл движения механизма; V3max,
V3min, V3cp
- максимальное, минимальное и среднее
значения скорости выходного звена за
цикл движения механизма; a3max,
a3min,
a3ср - максимальное, минимальное
и среднее значения ускорения выходного
звена за цикл движения механизма)
На
рисунке приведена структурная схема
кривошипно-ползунного механизма
компрессора. Коэффициент неравномерности
движения этого механизма определяется
по формуле ...(1max,
1min,
1ср -
максимальное, минимальное и среднее
значения угловой скорости начального
звена за цикл движения механизма;...(
1max, 1min,
1ср -
максимальное, минимальное и среднее
значения углового ускорения начального
звена за цикл движения механизма; V3max,
V3min, V3cp
- максимальное, минимальное и среднее
значения скорости выходного звена за
цикл движения механизма; a3max,
a3min,
a3ср - максимальное, минимальное
и среднее значения ускорения выходного
звена за цикл движения механизма)