

4.2 Рабочие характеристики.
Рабочие характеристики синхронного двигателя представляют собой зависимости тока статора Iа, электрической мощности P1, поступающей в обмотку статора, КПД и cosφ от отдаваемой механической мощности P2 при Uс=const, fс=const и Iв=const.
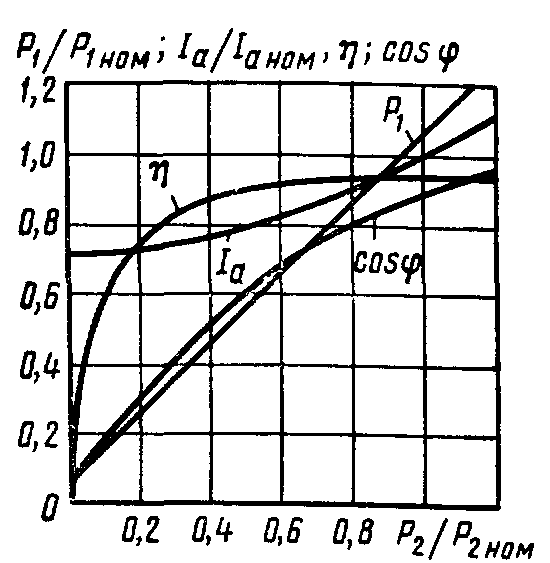
Рисунок 4.7 - Рабочие характеристики синхронного двигателя.
Часто эти характеристики строят в относительных единицах. Поскольку частота вращения синхронного двигателя постоянна, зависимость n2=f(Р2) обычно не приводится.
Зависимость P1=f(P2) имеет характер, близкий к линейному.
 (4.10)
(4.10)
Мощность Р2 является полезной мощностью синхронного двигателя:
 (4.11)
(4.11)
Полезный момент на валу синхронного двигателя:
 (4.12)
(4.12)
Ток двигателя при холостом ходе является практически реактивным. По мере роста нагрузки возрастает активная составляющая тока, в связи с чем зависимость тока Iа от мощности Р2 является нелинейной.
 (4.13)
(4.13)
Кривая ŋ=f(P2) имеет характер, общий для всех электрических машин.
 (4.14)
(4.14)
Синхронные двигатели могут работать при cosφ=1, но обычно их рассчитывают на работу при номинальной нагрузке с опережающим током и cosφном=O,9 - 0,8. В этом случае улучшается суммарный cosφ сети, так как создаваемая ими опережающая реактивная составляющая тока Iа компенсирует отстающую реактивную составляющую тока асинхронных двигателей.
Зависимость cosφ=f(P2) при работе машин с перевозбуждением имеет максимум в области Р2>Рном. При снижении Р2 значение cosφ уменьшается, а отдаваемая в сеть реактивная мощность возрастает.
4.3 Сравнительная оценка синхронных двигателей с асинхронными
Синхронные двигатели имеют следующие достоинства:
а) возможность работы при cosφ=1; это приводит к улучшению cosφ сети, а также к сокращению размеров двигателя, так как его ток меньше тока асинхронного двигателя той же мощности. При работе с опережающим током он является генератором реактивной мощности, поступающей в асинхронные двигатели, что снижает потребление этой мощности от генераторов электростанций;
б) меньшую чувствительность к колебаниям напряжения, так как их максимальный момент пропорционален напряжению в первой степени (а не квадрату напряжения);
в) строгое постоянство частоты вращения независимо от механической нагрузки на валу.
Недостатками синхронных двигателей являются:
а) сложность конструкции;
б) сравнительная сложность пуска;
в) трудности регулирования частоты вращения, которое возможно только путем изменения частоты питающего напряжения.
5. Генераторы постоянного тока
5.1.Основные теоретические сведения
Классификация генераторов постоянного тока производится по способу их возбуждения. Они подразделяются на генераторы с независимым возбуждением и с самовозбуждением.
У генераторов с самовозбуждением обмотка возбуждения получает питание от собственного якоря. В зависимости от способа ее включения генераторы с самовозбуждением подразделяются на генераторы с параллельным, последовательным и смешанным возбуждением.
Согласно ГОСТ 183-74 для машин постоянного тока принято следующее обозначение выводов обмоток: обмотки якоря Я1-Я2, независимой обмотки возбуждения Н1-Н2, параллельной обмотки возбуждения Ш1-Ш2, последовательной обмотки возбуждения С1-С2, обмотки дополнительных полюсов Д1-Д2, компенсационной обмотки К1-К2. Цифра 1 обозначает начало, а цифра 2 — конец обмотки.
По конструктивному выполнению машина постоянного тока с параллельным возбуждением подобна машине с независимым возбуждением, у которой обмотка якоря расположена на роторе, а обмотка возбуждения — на статоре.
Основные соотношения, характеризующие работу машины в качестве генератора, можно представить в виде приведенных ниже уравнений. Эти уравнения справедливы для всех генераторов независимо от способа их возбуждения.
Напряжение на выводах генератора всегда будет меньше наводимой в обмотке якоря ЭДС Е на значение падения напряжения:
 (5.1)
(5.1)
Падение напряжения в цепи якоря состоит
из двух составляющих:
 — падения напряжения в обмотках,
— падения напряжения в щеточном контакте.
Сопротивление
— падения напряжения в обмотках,
— падения напряжения в щеточном контакте.
Сопротивление
 включает в себя сопротивления обмотки
якоря и всех последовательно соединенных
с ней обмоток. В общем случае:
включает в себя сопротивления обмотки
якоря и всех последовательно соединенных
с ней обмоток. В общем случае:
 (5.2)
(5.2)
где rа, rД, rс, rк — сопротивления обмоток якоря, дополнительных полюсов, последовательной (сериесной) и компенсационной.