

2.2 Непряме визначення швидкості вітру на основі моделі генератора та нейроапроксиматора
Поведінку асинхронної машини як генератора краще описувати у системі координат, жорстко пов’язаної з ротором. Ця система координат обертається з частотою ωK = zPωΜ та має такий індекс R.
Передавальна функція щодо струму ротора має вигляд
![]() (2.5)
(2.5)
![]() (2.6)
(2.6)
Для розрахунку моменту вітроколеса Mw та обертового моменту генератора Mgen використовуються наступні формули:
![]() (2.7)
(2.7)
![]() (2.8)
(2.8)
Для малих відступів від робочих умов дійсна наступна передавальна функція для навантаження асинхронної машини у жорстких мережах
![]() (2.9)
(2.9)
Вона нагадує передавальну функцію навантаження двигуна постійного струму паралельного збудження. Стала часу σTR описує електричні процеси в машині та відповідає сталій часу якоря TA. Перехідний процес струму статора асинхронної машини також схожий з передавальною функцією струму якоря машини постійного струму паралельного збудження. Знаменник в передавальній функції містить поліном, який може викликати коливальний процес при 4σTR>TM після поштовху навантаження. У навантаженої машини механічна стала часу приводу, як правило, настільки велика, що перехідні процеси набувають аперіодичної форми.
Асинхронні машини зараз все частіше використовуються в поєднанні з швидким перетворювачем для регулювання швидкості й обертового моменту у керованих системах. Основою для розробки пристрою управління, як правило, є схема асинхронної машини у рухомій системі координат, що орієнтована за полем.
Рівняння механічного моменту мають вигляд:
![]() (2.10)
(2.10)
Функціональна схема за рівняннями для асинхронної машини з рухомою системою координат зображена на рис. 2.3.
Функціональна схема асинхронної машини містить перетворювач фаз для перетворення струмів статору isa, isb та isc у 2 змінних компонента isα та isβ нерухомої системи координат та вектора потокозчеплення ψR, який розраховується зі змінних isα , isβ та сталих isd , isq. Перерахунок ведеться за формулами:
![]() (2.11)
(2.11)
 (2.12)
(2.12)
Компоненти струму статора визначають безпосередньо обертовий момент двигуна MM (рис. 2.3), аналогічно струму якоря в машині постійного струму. Компонента iSd впливає через інерційну ланку зі сталою часу ротора TR на потокозчеплення ψRd. Стала часу ротора TR відповідає сталій часу збудження машини постійного струму і знаходиться в діапазоні TR=20...200 мс (залежно від потужності двигуна).

Рисунок 2.3 – Структурна схема асинхронної машини
Для динамічного дослідження асинхронних машин з керуванням напругою статора й обчислення струму статора не варто забувати про вплив напруги статора. Тобто схема асинхронної машини також має включати в себе рівняння напруги статора. Рівняння напруги статора мають вигляд:
![]() (2.13)
(2.13)
![]() (2.14)
(2.14)
де
![]() – стала часу розсіювання статора.
– стала часу розсіювання статора.
Стала часу розсіювання σΤs відповідає сталій часу якоря машини постійного струму з паралельним збудженням та є приблизно тієї ж величини. Рис. 2.4 показує доповнення схеми асинхронної машини рівняннями напруги статора [6].

Рисунок 2.4 – Структурна схема асинхронної машини з урахуванням напруги статора
Структурна схема вітроустановки, що підлягає дослідженню наведена на рис. 2.5. Вона складається з двох умовних частин. Перша – це модель асинхронного генератора, що базується на вище наведеній теорії. Та другої – об’єкту дослідження цієї роботи – нейромережі. За допомогою нейромережі потрібно побудувати швидкісно-моментні залежності для різних пітч-кутів лопатей. Це регулювання потрібно для отримання максимально можливого коефіцієнта потужності за будь-яких умов експлуатації.
Рисунок 2.5 – Структурна схема розрахунку генераторного моменту та швидкості вітру
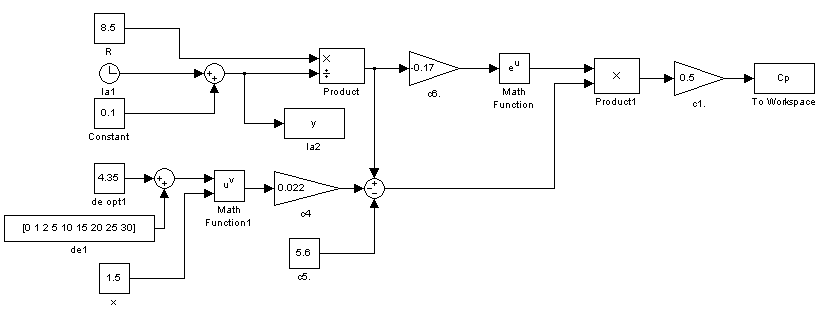
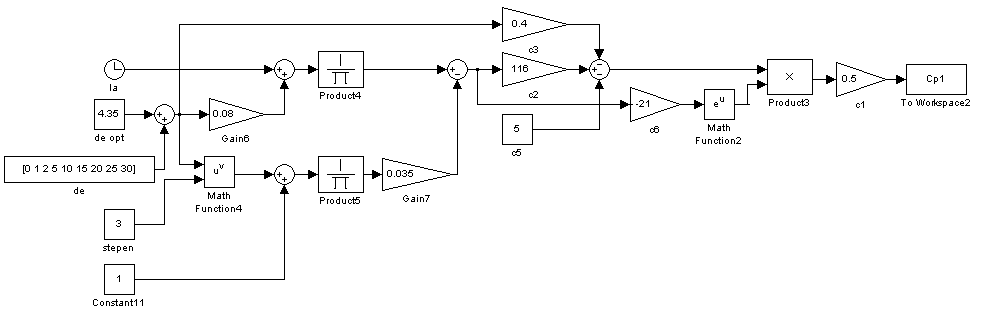
Для розрахунку моменту генератора, який буде виступати як вхідні дані для отримання швидкісно-моментних залежностей була збудована спрощена модель генератора (рис. 2.6). На вході швидкість вітру, що зростає лінійно. Модель працює зі стартовою швидкістю вітру у 3м/с. Далі обчислюється коефіцієнт швидкості за допомогою формули перерахунку лінійної швидкості у обертову. Також вхідною величиною є пітч-кут (змінюється від 0 до 40 градусів). Ці вхідні дані перетворюються за допомогою нейромережі у коефіцієнт потужності. Нейромережа побудована на базі залежностей поданих на рис. 2.1. Отриманий коефіцієнт потужності разом зі швидкістю вітру використовується для обчислення обертового моменту. Обчислення ведеться за формулою (2.8).
Як результат моделювання, отримуємо моментно-швидкісні характеристики для різних пітч-кутів. Вони подані на рис. (2.7) та (2.8).

Рисунок 2.6 – Модель для розрахунку генераторного моменту на основі математичної моделі
Mw,N·m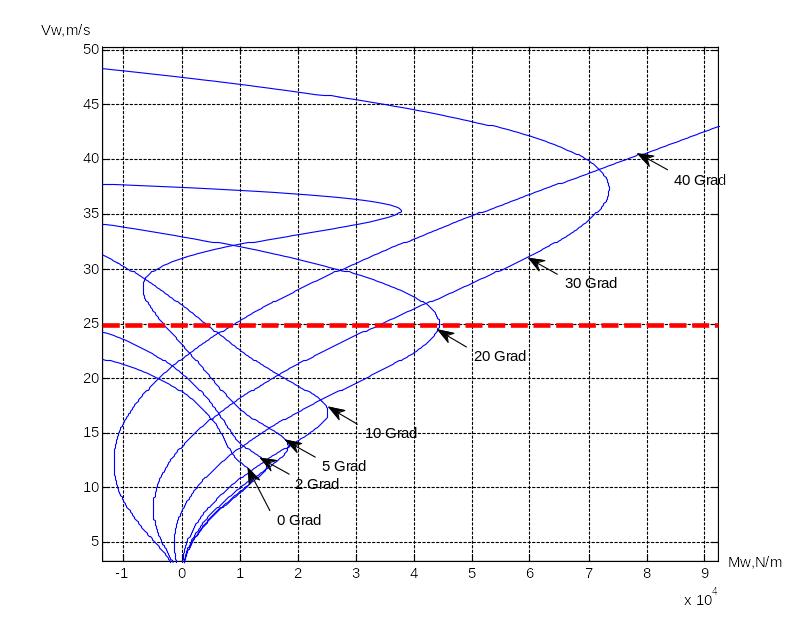
Рисунок 2.7 - V-M залежності вітроустановки для vw=3…48м/с.
Mw,N·m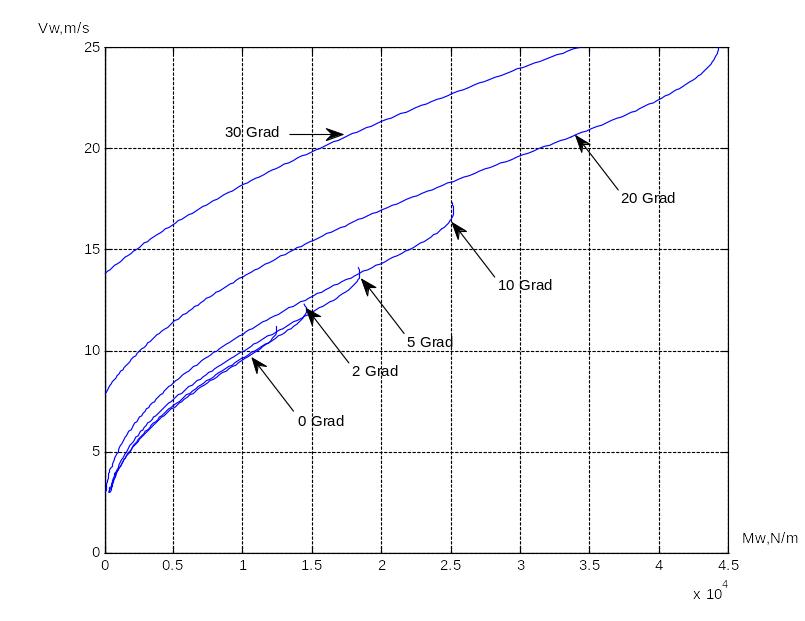
Рисунок 2.8 – V-M залежності вітроустановки для vw=3…25м/с.
Для розрахунку швидкості вітру на основі визначених вище параметрів була розроблена програма з використанням програмного пакета MATLAB (див. Додаток Б). Ця програма будує нейромережу. Вхідними значеннями для цієї мережі є обертовий момент генератора, пітч-кут та швидкість вітру. Ці параметри були розраховані вище та збережені за допомогою розробленої програми у спеціальному вигляді.
Програма задає початкове значення швидкості вітру - 3 м/с. Для максимальної швидкості було обрано 48 м/с. Це покриває можливий діапазон швидкостей вітру - 3-25 м/с. Пітч-кут змінюється від 0 до 40 градусів і дорівнює 0, 2, 5, 10, 20, 30 та 40 градусам.
Для дослідження була обрана 3-шарова нейромережа (рис. 2.9). З ваговими коефіцієнтами мережі – 10, 8, 1 відповідно. З того, що вагові коефіцієнти мережі різняться для різних шарів випливає, що мережа має динамічні зв'язки, тобто налаштування синаптичних зв'язків відбувається в процесі навчання.
Навчання відбувається за 2000 епох. Ця цифра була обрана експериментально. Вона дає досить точні результати при невеликому часі навчання нейромережі. Нейромережа використовує інформацію у формі дійсних чисел. Навчання відбувається з вчителем (відомі вихідні результати нейронної мережі).
Цільова похибка складає 0,00001, проте в процесі дослідження вона не була досягнута.
У якості вхідних даних нейромережі виступають залежності генераторного моменту від швидкості вітру для різних пітч-кутів лопатей ротора.
Рисунок 2.9 – Структурна схема нейромережі
Результати моделювання подані на рис. 2.10 та більш детально на 2.11. На рис. 2.11 зображені криві для пітч-кута 0, 2, 5 та 10 градусів для номінального режиму роботи. Також на рис. 2.10 та рис. 2.11 представлені значення, зображені на рис. 2.7. На цих рисунках неможливо точно визначити різницю між залежностями моменту генератора від швидкості вітру, які були розраховані за двома незалежними методами.
Mw,N·m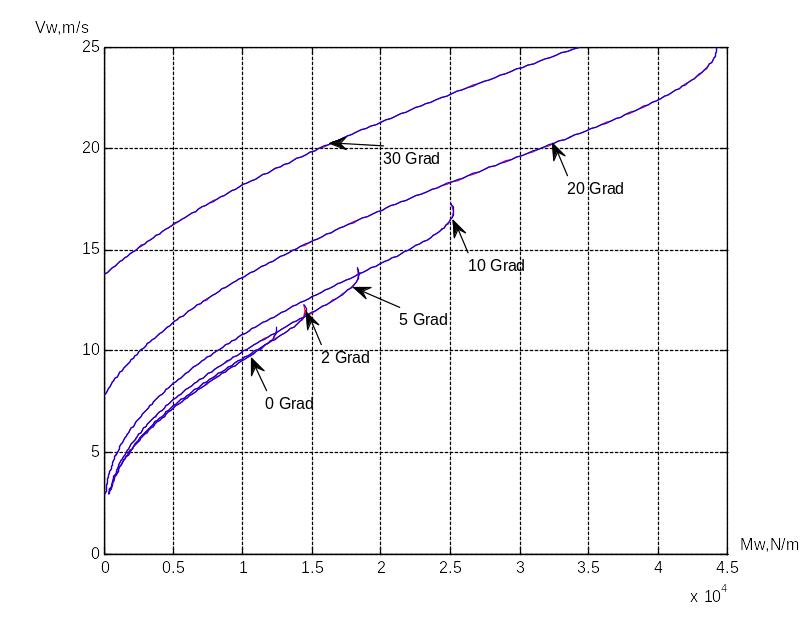
Рисунок 2.10 - Швидкісно-моменті криві для різних пітч-кутів (нейромережа, аналітична функція)
На рис. 2.12 представлена похибка між цими двома залежностями, яка дорівнює приблизно 0,001. Це говорить про високу точність тренування нейромережі.
Як результат, були отримані залежності моменту генератора від швидкості вітру, які можуть бути використані при регулюванні лопатей вітроколеса.
Mw,N·m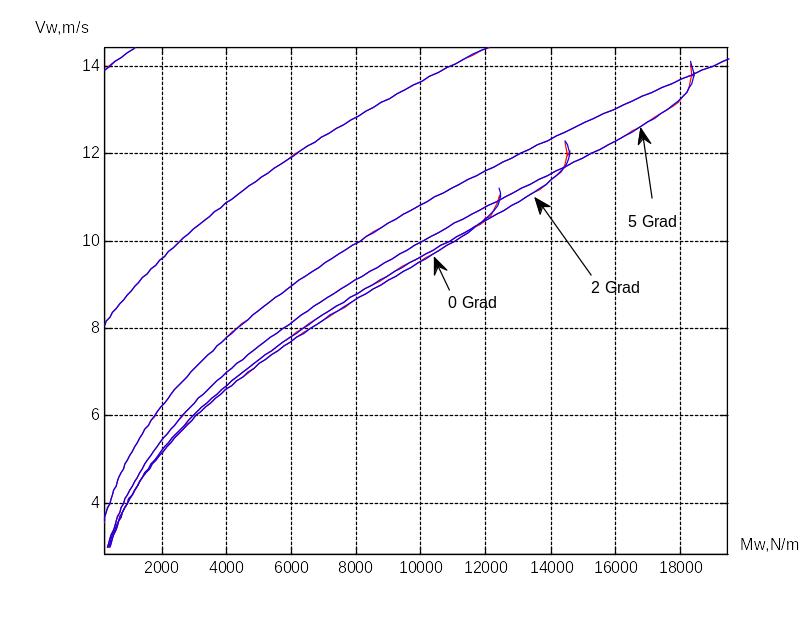
Рисунок 2.11 – Залежність моменту генератора від швидкості вітру для номінального режиму (нейромережа, аналітична функція)
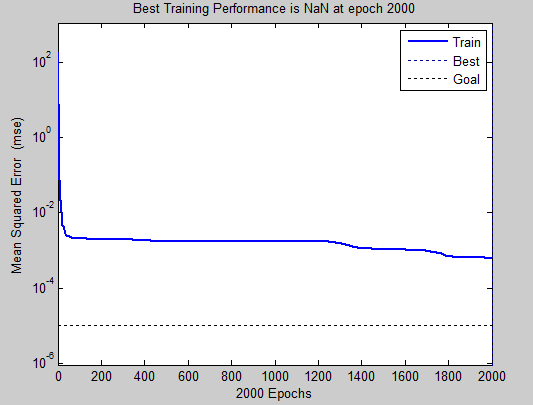
Рисунок 2.12 – Похибка між швидкісно-моментними кривими
ВИСНОВОК
У роботі було досліджено вітрову установку. Виробництво електроенергії з відновлювальних джерел (енергії вітру) дуже актуальне сьогодні. Величезна кількість енергії, що надходить в електромережу, виробляється саме з цих джерел.
Була побудовано та досліджено модель вітрового генератора для визначення моменту генератора. Розроблено нейромережу для розрахунку швидкості вітру на основі виміряних параметрів. Здійснено моделювання системи за допомогою програмного забезпечення пакета MATLAB/Simulink.
У результаті були отримані швидкісно-моментні криві вітрогенератора, які можуть бути використані для керування лопатями ротора.
ПЕРЕЛІК ПОСИЛАНЬ
www.siemens.ua
www.wikipedia.org
Gasch R., Twell J., Windkraftanlagen. Grundlagen, Entwurf, Planung und Betrieb. – Wiesbaden: Vieweg+Teubner, 2007. – 569 S.
Hau E., Windkraftanlagen. Grundlagen, Technik, Einsatz, Wirtschaftlichkeit. –München: Springer, 2003. - 789 S.
Heier S., Windkraftanlagen. Systemregelung, Netzintegration und Regelung. –Wiesbaden: Vieweg+Teubner, 2009. – 482 S.
Riefenstahl U. Elektrische Antriebstechnik. – Stuttgart-Leipzig: Teubner, 2000. – 401 S.
ДОДАТОК A
Моделі для розрахунку залежності Cp-λ
ДОДАТОК Б
Програма для розрахунку швидкості вітру та тренування нейромережі
clc; clear all; close all;
R=8.5; w=4.7; D=17;
pitch1=[0, 2, 5, 10, 20, 30, 40]; start=3;
for i=1:7
pitch=pitch1(i)
sim('Wiradmodel_Neuro_Vw_Mw',50);
figure(3);plot(Mw,Vw); hold on; grid on;
end
pitch=0;start=3;t=8.25;sim('Wiradmodel_Neuro_Vw_Mw',t);
Mw0=Mw;Vw0=Vw;pitch0=pitch; figure(1);plot(Mw,Vw); hold on; grid on;
pitch=2;start=3;t=9.3;sim('Wiradmodel_Neuro_Vw_Mw',t);
Mw2=Mw;Vw2=Vw;pitch2=pitch; figure(1);plot(Mw,Vw); hold on; grid on;
pitch=5;start=3;t=11.1;sim('Wiradmodel_Neuro_Vw_Mw',t);
Mw5=Mw;Vw5=Vw;pitch5=pitch; figure(1);plot(Mw,Vw); hold on; grid on;
pitch=10;start=3;t=14.3;sim('Wiradmodel_Neuro_Vw_Mw',t);
Mw10=Mw;Vw10=Vw;pitch10=pitch; figure(1);plot(Mw,Vw); hold on; grid on;
pitch=20;start=7.86;t=257.86;
sim('Wiradmodel_Neuro_Vw_Mw',t);
Mw20=Mw;Vw20=Vw;pitch20=pitch; figure(1);plot(Mw,Vw); hold on; grid on;
pitch=30;start=13.8;t=25-13.8;
sim('Wiradmodel_Neuro_Vw_Mw',t);
Mw30=Mw;Vw30=Vw;pitch30=pitch; figure(1);plot(Mw,Vw); hold on; grid on;
p=[Mw0' Mw2' Mw5' Mw10' Mw20' Mw30';pitch0' pitch2' pitch5' pitch10' pitch20' pitch30']; t=[Vw0' Vw2' Vw5' Vw10' Vw20' Vw30'];
net=newff(minmax(p),[10,8,1],{'tansig','tansig','purelin'},'trainlm');
net.trainparam.show=100;
net.trainparam.epochs=2000;
net.trainparam.goal=1e-5;
[net,tr]=train(net,p,t);
pitch=[pitch0' pitch2' pitch5' pitch10' pitch20' pitch30'];
Mw=[Mw0' Mw2' Mw5' Mw10' Mw20' Mw30'];
Vw=[Vw0' Vw2' Vw5' Vw10' Vw20' Vw30'];
p0=[Mw0'; pitch0']; n0=sim(net,p0);
figure(2);plot(Mw0,n0,'r'),grid on,hold on; plot(Mw0,Vw0,'b'),grid on,hold on;
p2=[Mw2'; pitch2']; n2=sim(net,p2);
plot(Mw2,n2,'r'),grid on,hold on;plot(Mw2,Vw2,'b'),grid on,hold on;
p5=[Mw5'; pitch5']; n5=sim(net,p5);
plot(Mw5,n5,'r'),grid on,hold on;plot(Mw5,Vw5,'b'),grid on,hold on;
p10=[Mw10'; pitch10']; n10=sim(net,p10);
plot(Mw10,n10,'r'),grid on,hold on;plot(Mw10,Vw10,'b'),grid on,hold on;
p20=[Mw20'; pitch20']; n20=sim(net,p20);
plot(Mw20,n20,'r'),grid on,hold on;plot(Mw20,Vw20,'b'),grid on,hold on;
p30=[Mw30'; pitch30']; n30=sim(net,p30);
plot(Mw30,n30,'r'),grid on,hold on;plot(Mw30,Vw30,'b'),grid on,hold on;