

1. Методы отделения корней уравнения.
Отделение корней можно осуществить аналитическим и графическим способами:
I. Чтобы отделить корень аналитически, достаточно найти такой отрезок [a, b], на котором выполняются 3 условия:
1) f (a)*f(b) <0
2) f (x) – непрерывная на [a , b] функция
3) f (x) – монотонная на [a , b] функция.
II. Чтобы отделить корень графически, необходимо построить график функции f(x) на промежутке изменения x, тогда абсцисса точки пересечения графика функции с осью ОХ есть корень уравнения.
Уравнение
можно заменить равносильным f(x)=
 .
Строят графики этих функций, тогда
искомый корень является абсциссой точки
пересечения этих графиков.
.
Строят графики этих функций, тогда
искомый корень является абсциссой точки
пересечения этих графиков.
2. Уточнение корней уравнения. Метод деления отрезка пополам, метод секущих.
Уточнить корень – значит найти его приближенное значение с заданной погрешностью e.
Самый простой метод, пригодный для любых непрерывных функций – метод деления отрезка пополам. Это самый простой метод вычисления корня уравнения. Разделим исходный отрезок [a,b] пополам c=(a+b)/2 .
Проверяя знаки f(a), f(b), f(c) выясним в каком из отрезков [a,c] или [c,b] содержится корень
x* є [a,c] , если f(a)f(c)<0 ;
x* є [c,b] , если f(c)f(b)<0 .
Выбранный отрезок принимаем за [a,b] и повторяем это до тех пор пока получаемый отрезок не сожмется до заданной степени точности. При n итерациях получим соотношение (b-a)/2n <= e, из которого можно вычислить число итераций, необходимое для достижения заданной степени точности n>= ln2(b-a)/e .
Ввиду медленной сходимости этот метод редко используется для нахождения значения корня, обычно его применяют для локализации корня с дальнейшим уточнением значения корня каким-либо другим методом.
Метод секущих. Этот метод можно получить из метода Ньютона заменив производную f'(x) отношением разности функции к разности аргумента в окрестности рассматриваемой точки
f '(x) ~( f(x+h) - f(x))/h.
Подставляя это выражение в xk+1 = xk - f(xk)/f '(xk) получим
xi+1 = xi - f(xi)h / (f(xi+h)-f(xi)) (1)
Геометрически это означает, что приближенным значением корня считается точка пересечения секущей, проходящей через две точки функции f(xi) и f(xi+h), с осью абсцисс.
П ри
использовании этого метода следует
уменьшать величину h по мере приближения
к корню.
ри
использовании этого метода следует
уменьшать величину h по мере приближения
к корню.
Вариацией этого метода является метод ложных положений. В нем для проведения секущей используются текущая и предыдущая точки. Первое приближение вычисляется по формуле (1), а остальные по формуле xi+1 = xi - f(xi)(xi-1 - xi) /(f(xi-1) -f(xi)).
3. Уточнение корней уравнения. Методы касательных (Ньютона).
f(x)=0. Предположим, что f(x) имеет корень с на отрезке [a,b] и дифференцируема на этом отрезке, причём f’(x) не обращается в нуль.
Возьмём
произвольную точку x0 [a,b]
и запишем в этой точке уравнение
касательной y=f(x0)+f’(x0)(x-x0).
[a,b]
и запишем в этой точке уравнение
касательной y=f(x0)+f’(x0)(x-x0).
Графики функций f(x) и её касательной близки около точки касания, поэтому естественно ожидать, что точка x1 пересечения касательной с осью ОХ будет находиться недалеко от корня с. Для определения точки x1 имеем уравнение:
f(x0)+f’(x0)(x1-x0)=0

Повторим
проделанную процедуру: написав уравнение
касательной графика функции f(x)
при x=x1
и найдя точку пересечения x2
с осью ОХ, получим

Продолжая этот процесс, получаем:


Достаточные условия сходимости метода касательных: пусть f(x) определена и дважды дифференцируема на отрезке [a,b], причем f(a)*f(b)<0, и производные f’(x) и f’’(x) сохрняют постоянный знак на отрезке [a,b], тогда исходя из начального приближения x0 [a,b], удовлетворяющего неравенству f(x0)*f’’(x0)>0, можно построить последовательность , сходящуюся к единственному на [a,b] решению уравнения f(x)=0.
Геометрическая интерпретация такова: если через точку с координатами (xn,f(xn)) провести касательную, то абсцисса точки пересечения касательной с осью ОХ есть очередное приближение xn+1 к корню уравнения.
Итерационный
процесс можно прекращать, если
 .
.
4. Аппроксимация функций.
Задача заменить функцию f(xi), заданную таблицей, непрерывной функцией Q(x), необязательно совпадающей с f(xi) во всех точках, но достаточно близкой к ней. Такая задача называется задачей приближения или аппроксимацией функции.
Функция f(xi) называется аппроксимируемой.
Функция Q(x) называется аппроксимирующей.
Классической теорией приближения Q(x) выбирают в классе степенных многочленов.
Таким образом,будем рассматривать аппроксимацию функции yi=f(xi),i=0,n полиномом степени m.
Qm(x)=a0+a1x+…+anxm,
m n.
n.
Для решения задачи аппроксимации необходимо выбрать меру близости полинома к заданным точкам.
5. Квадратичная аппроксимация (МНК).
МНК
заключается в том, чтобы построить такой
полином Qm(x)= ,
что сумма квадратичных отклонений
значений аппроксимируемой и аппроксимирующей
функций, называемая квадратичным
отклонением,
в узлах была бы минимальной.
,
что сумма квадратичных отклонений
значений аппроксимируемой и аппроксимирующей
функций, называемая квадратичным
отклонением,
в узлах была бы минимальной.


Очевидно, что минимума квадратичного отклонения Φ можно добиться засчёт изменения коэффициентного полинома Qm(x) a0, am. Условием минимума является равенство 0 частных производных по всем коэффициентам a0,…,am. Это дает систему m+1 уравнения с m+1 неизвестным.



…

Раскрывая скобки и выполняя суммирования получаем:
 +
+ +…+am
+…+am



Система представляет собой СЛАУ относительно коэффициента аi . Решив систему, построим полином Qm(x), аппроксимирующий функцию yi=f(xi) и минимизирующий квадратичное отклонение.
Можно доказать, что если среди точек х1, х2,…, xn нет совпадающих, m≤n, то определитель системы отличен от нуля, следовательно, система имеет единственное решение.
Замечание: Функция Q(x) необязательно должна быть представлена полиномом вида . Единственным критерием выбора этой функции является возможность минимизации суммы квадратов отклонений. Как правило, используют аппроксимирующий полином не выше 3-ей степени.

{ - разность между аппроксимируемой и аппроксимирующей функциями.
Мы минимизируем сумму площадей квадратов, построенных на разности.
6. Интерполяция функций. Интерполяционный полином Лагранжа.
Пусть задано несовпадающее множество точек xi, которое мы будем называть узлами и в которых известны значения f(xi), i=0,n.
Способ построения аппроксимирующей функции, при котором в узлах значения аппроксимирующей и аппроксимируемой функции совпадают, называется интерполяцией.
Интерполяция – это частный случай аппроксимации, когда аппроксимирующая прямая проходит через точки таблицы.
Если аппроксимирующую функцию строить только по некоторым точкам таблицы, то эти точки называются узлами интерполяции и аппроксимирующая прямая проходит через узлы интерполяции.
В
качестве аппроксимирующей функции
возьмём полином
 ,
тогда задача интерполяции заключается
в том, чтобы найти такой полином Qm(x),
который в заданных точках xi
принимает те же значения, что и f(x),
т.е. Qm(xi)=f(xi),
то Qm(x)
называется интерполяционным полиномом.
,
тогда задача интерполяции заключается
в том, чтобы найти такой полином Qm(x),
который в заданных точках xi
принимает те же значения, что и f(x),
т.е. Qm(xi)=f(xi),
то Qm(x)
называется интерполяционным полиномом.
Пусть m=n, тогда коэффициенты ai можно определить из системы уравнений:

Определитель той системы – есть определитель Вандермонда:

Система имеет единственное решение, т.к. ∆≠0.
Полином Q(x)=Ln(x), коэффициенты которого определяются из этой системы, называется интерполяционным полиномом Лагранжа и может быть записан в виде:

m=n, где m – степень полинома, n – число узлов+1. Следовательно, степень полинома должна быть на 1 меньше числа узлов.



7. Численное дифференцирование.
Численное дифференцирование используется для приближенного вычисления производных функции заданной таблицей и для функций, которые по разным причинам неудобно или невозможно дифференцировать аналитически. В последнем случае вычисляется таблица функции в окрестности исследуемой точки и по этим значениям вычисляется приближенное значение производной.
Итак, пусть в точках xi, i=0,1,2,...n известны значения функции yi=f(xi). Способ построения формул численного дифференцирования состоит в том, что по табличным точкам строится интерполянт Pn(x), который дифференцируется нужное число раз, и делается допущение о том, что производная от функции приблизительно равна производной от интерполянта
![]()
Погрешность
такой формулы характеризуется k-той
производной от ошибки интерполяции
![]() .
.
8. Численное интегрирование. Геометрический смысл численного интегрирования.
Задача численного интегрирования состоит в нахождении приближенного значения определенного интеграла от функции, заданной в виде таблицы.
Метод прямоугольников
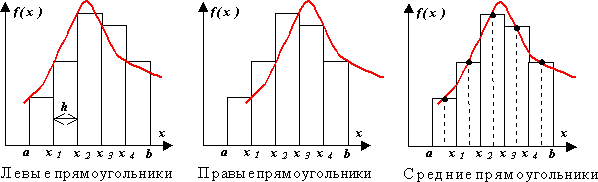
Различают метод левых, правых и средних прямоугольников. Суть метода ясна из рисунка. На каждом шаге интегрирования функция аппроксимируется полиномом нулевой степени – отрезком, параллельным оси абсцисс.
М етод трапеции
Аппроксимация в этом методе осуществляется полиномом первой степени.

Метод Симпсона
Подынтегральная функция f(x) заменяется интерполяционным полиномом второй степени P(x) – параболой, проходящей через три узла, например, как показано на рисунке ((1) – функция, (2) – полином).
9. Простейшие формулы численного интегрирования.
Квадратурная формула левых прямоугольников
![]()
Очевидно, что ее алгебраическая степень точности d=0 и формула является интерполяционной.
Квадратурная формула правых прямоугольников
![]()
Квадратурная формула средних прямоугольников
![]()
Алгебраическая степень точности d=1 и формула является интерполяционной.
Квадратурная формула трапеций

Квадратурная формула Симпсона

10. Обобщение простейших формул численного интегрирования.
?
11. Задача Коши для обыкновенного дифференциального уравнения 1-го порядка.
Задача Коши для обыкновенного дифференциального уравнения состоит в том, чтобы найти решение уравнения y' = f(x, y) (2) , удовлетворяющее начальным условиям
y(x0) = y0. (3)
Решение задачи Коши называется частным решением уравнения (2) при условии(3). Частному решению соответствует одна из интегральных кривых, проходящих через точку (x0,y0).
Будем искать приближенное решение этой задачи на конечном множестве точек отрезка [a, b], называемом сеткой:
xi = x0 + ih, x0 = a, xn = b,
h = (b-a)/n, i = 0,1,2,...,n.
Приближенным решением задачи будет некоторая сеточная функция y = y (x).
Для получения значений сеточной функции используются различные методы основанные на замене производной каким-либо разностным уравнением.
12. Метод Эйлера решения задачи Коши для ОДУ 1-го порядка.
Простейшим численным методом решения задачи Коши является метод ломанных Эйлера. Суть метода Эйлера заключается в замене функции y(x) на отрезке интегрирования прямой линией, касательной к графику в точке x=xi. Если искомая функция сильно отличается от линейной на отрезке интегрирования, то погрешность вычисления будет значительной. Ошибка метода Эйлера прямо пропорциональна шагу интегрирования:

13. Одномерные задачи оптимизации.
Под оптимизацией понимают процесс выбора наилучшего варианта из всех возможных. Если рассматривать функцию, то поиск наибольшего или наименьшего значения. Общие методы оптимизации:
1. аналитические методы, использующие классические методы дифференциального и вариационного вычисления
2. численные методы
3. графические методы
Функция
f(x),
заданная на a≤x≤b
называется унимодальной
на отрезке [a,b],
если существует единственная точка x*
минимума f(x),
т.е. f(x*)= и если для любых двух точек x1,
x2
[a,b]
выполняются условия: f(x1)>f(x2),
что следует из неравенства x1<x2≤x*
и f(x1)<f(x2),
что следует из неравенств x2>x1≥x*.
и если для любых двух точек x1,
x2
[a,b]
выполняются условия: f(x1)>f(x2),
что следует из неравенства x1<x2≤x*
и f(x1)<f(x2),
что следует из неравенств x2>x1≥x*.
Метод дихотомии
Пусть задана унимодальная функция f(x). Необходимо найти минимум функции на отрезке [a,b], которому принадлежит точка локального минимума x*. Для сужения отрезка унимодальности используем точки x1, x2, расположенные симметрично относительно середины отрезка [a,b].
Пусть
известен отрезок [an-1;bn-1],
находим середину отрезка:

Вычисляем значения функции в точках xn±δ, сравниваем их:
1) если f(xn-δ)<f(xn+δ), то an=an-1, bn=xn+δ
2) если f(xn-δ)>f(xn+δ), то an= xn-δ, bn=bn-1
В результате приходим к последовательности вложенных отрезков, таких что точка локального минимума принадлежит каждому из них и является общим пределом последовательности.
Метод золотого сечения
Золотое сечение, открытое Евклидом, состоит в разбиении интервала [a,b] на 2 части точкой x1 таким образом, чтобы отношение длины всего отрезка к большей части было равно отношению большей части к меньшей.
Коэффициент
дробления отрезка [ a , b ] :
![]()
x1=b+(1-k)(b-a)
x2=b+k(b-a)
a
 x1
x2
b
x1
x2
b
Алгоритм:
1) вычисляем значения x1, x2
2) вычисляем значения f(x1), f(x2)
3) проверяем условия:
- если f(x1)≤ f(x2), то для дальнейшего деления оставляют интервал [a,x2]
- если f(x1)> f(x2), то для дальнейшего деления оставляют интервал [x1,b]
Процесс деления продолжают до тех пор, пока длина интервала неопределенности не станет меньше заданной точности ε.Замечание: x1 производит золотое сечение интервала [a,x2], x2 – золотое сечение отрезка [x1,b].
14. Многомерные задачи оптимизации.
Пусть f(x1, x2,…, xn) – целевая функция. Задача поиска максимума этой функции сводится к минимизации функции - f(x1, x2,…, xn), поэтому будем рассматривать задачу поиска минимума. Наибольшие трудности поиска минимума f(x) возникают, когда размерность n вектора x велика, поэтому важнейшей проблемой является уменьшение размерности вектора целевой функции на этапе построения математической модели. В модели следует сохранить только те xi, которые сильнее других влияют на изменение целевой функции.
Линиями уровня f(x1, x2) называют семейство линий плоскости R2, на которых функция принимает постоянное значение.
Неявным уравнением линии уровня является уравнение вида f(x1, x2)=с.
Если функция f(x) имеет единственную точку минимума x*(x1*, x2*), то функция называется мономодальной и линии уровня имеют следующий вид:



