ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
Орловский государственный технический Университет
Д.Н. Ешуткин и др.
Теоретическая механика
ЗАДАНИЯ ДЛЯ САМОСТОЯТЕЛЬНЫХ РАБОТ
Задание Д-5. Общее уравнение динамики
Рекомендовано редакционно-издательским советом ОрелГТУ
в качестве учебного пособия
Орел 2006
УДК Е 96531 (076)
ББК 22.21 7
Е 96
Рецензенты:
кандидат технических наук, заведующий кафедрой общеинженерных дисциплин Орловского государственного аграрного университета
Г.М. Абрамов,
кандидат технических наук, доцент кафедры «Динамика и прочность машин»
А.Ю. Корнеев
Е 96 Ешуткин, Д.Н. Теоретическая механика, задания для самостоятельных работ: учебное пособие/ Д.Н. Ешуткин, А.И. Пономарев, Е.Н. Грядунова, А.В. Журавлева. — Орел: ОрелГТУ, 2006. — 122 с.
Учебное пособие содержит задания для самостоятельных работ, которые охватывают все основные разделы теоретической механики: статику, кинематику и динамику, и задачи по всем главным темам этих разделов. К каждому заданию дается подробное указание по выполнению, формулы и примеры.
Учебное пособие отвечает содержанию рабочих программ по теоретической механике и предназначено студентам, обучающимся на всех специальностях очной и заочной форм обучения, изучающих дисциплину «Теоретическая механика».
УДК 531 (076)
ББК 22.21 7
Е 96
© ОрелГТУ, 2006
Введение
Теоретическая механика – это наука о законах механического движения и равновесия материальных тел. Под механическим движением понимается изменение относительного положения материальных тел в пространстве с течением времени. Теоретическая механика изучает наиболее общие законы механического движения. Она не учитывает индивидуальные свойства материальных тел, за исключением двух свойств: протяженности и гравитации. Наблюдать и изучать механическое движение материальных тел можно по отношению к другим материальным телам, принятым за тела отсчета. С этими телами обычно связывают систему координатных осей, которую называют системой отсчета. Частным случаем механического движения является равновесие материальных тел.
Теоретическую механику условно делят на статику, кинематику и динамику.
В данном пособии приведены достаточно простые задачи по основным разделам теоретической механики, решение которых позволяет освоить основные алгоритмы применения теоретических положений на практике.
Характерная особенность приведенных заданий – несложность использования математических выкладок и их физическая прозрачность, что позволяет не акцентировать внимание студента на конкретных условиях задачи, а понять при самостоятельной работе алгоритм решения подобного класса задач.
3 Динамика
Динамикой называется раздел теоретической механики, в котором изучается движение материальных тел (точек) с учетом действующих на них сил.
3.5 Задание д-5. Общее уравнение динамики
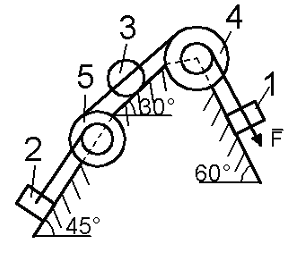
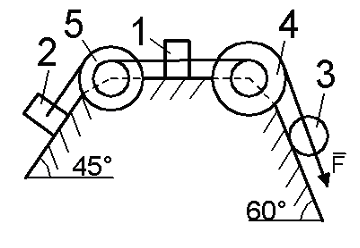
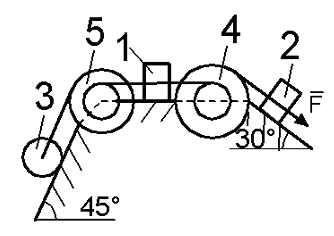
3.5.1 Применение принципа Даламбера – Лагранжа
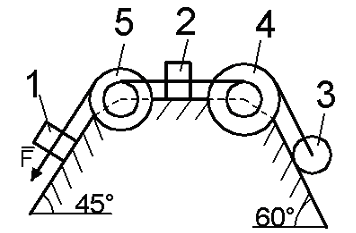
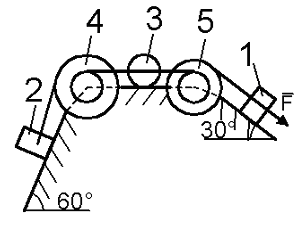
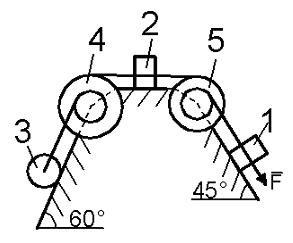
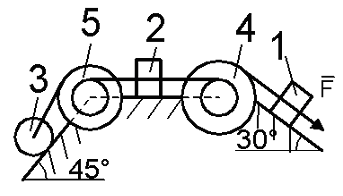
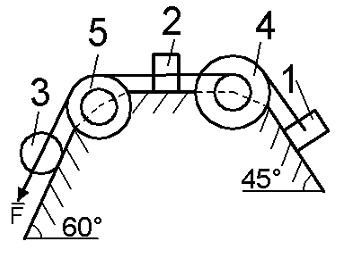
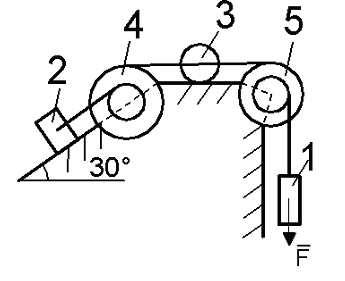
Механическая
система состоит из ступенчатых шкивов
4
и 5
весом Р4
и Р5
с радиусом ступеней R4=R,
r4=0,5R,
R5=0,8R,
r5=0,4R
(массу каждого шкива считать равномерно
распределенной по его внешнему ободу),
грузов 1
и 2
и сплошного однородного цилиндра катка
3, весом Р1,
Р2,
Р3
(рис. 3.97-3.126). Тела системы соединены
нитями, намотанными на шкивы; участки
нитей параллельны соответствующим
плоскостям. Система движется в вертикальной
плоскости под действием силы тяжести
и постоянной силы
![]() Коэффициент трения скольжения грузов
о плоскостьf
= 0,1, катки
катятся без
проскальзывания, трением качения
пренебречь. Определить ускорение груза,
имеющего больший вес. Сила
F,
и вес всех тел заданы в ньютонах (табл.11).
Коэффициент трения скольжения грузов
о плоскостьf
= 0,1, катки
катятся без
проскальзывания, трением качения
пренебречь. Определить ускорение груза,
имеющего больший вес. Сила
F,
и вес всех тел заданы в ньютонах (табл.11).
Таблица 10
Данные к заданиям Д-5, Д-6
|
Вариант |
Р1 |
Р2 |
Р3 |
Р4 |
Р5 |
F |
|
0 |
3Р |
4Р |
2Р |
3Р |
2Р |
18Р |
|
1 |
4Р |
2Р |
2Р |
Р |
2Р |
16Р |
|
2 |
6Р |
5Р |
4Р |
2Р |
Р |
30Р |
|
3 |
3Р |
3Р |
Р |
2Р |
Р |
15Р |
|
4 |
3Р |
4Р |
2Р |
3Р |
2Р |
16Р |
|
5 |
2Р |
3Р |
Р |
2Р |
3Р |
15Р |
|
6 |
8Р |
6Р |
4Р |
3Р |
2Р |
40Р |
|
7 |
5Р |
Р |
2Р |
Р |
3Р |
28Р |
|
8 |
3Р |
Р |
Р |
2Р |
3Р |
15Р |
|
9 |
2Р |
3Р |
Р |
Р |
2Р |
17Р |
|
|
|
|
Рис. 3.97 |
Рис. 3.98 |
|
|
|
|
Рис. 3.99 |
Рис. 3.100 |
|
|
|
|
Рис. 3.101 |
Рис. 3.102 |
|
|
|
|
Рис. 3.103 |
Рис. 3.104 |
|
|
|
|
Рис. 3.105 |
Рис. 3.106 |
|
|
|
|
Рис. 3.107 |
Рис. 3.108 |
|
|
|
|
Рис. 3.109 |
Рис. 3.110 |
|
|
|
|
Рис. 3.111 |
Рис. 3.112 |
|
|
|
|
Рис. 3.113 |
Рис. 3.114 |
|
Рис. 3.115 |
Рис. 3.116 |
|
|
|
|
Рис. 3.117 |
Рис. 3.118 |
|
|
|
|
Рис. 3.119 |
Рис. 3.120 |
|
|
|
|
Рис. 3.121 |
Рис. 3.122 |
|
|
|
|
Рис. 3.123 |
Рис. 3.124 |
|
|
|
|
Рис. 3.125 |
Рис. 3.126 |