

4. По характеру звеньев, включаемых в сау, системы делятся на линейные и нелинейные.
В линейных системах между выходной и входной величинами существует линейная функциональная зависимость (в статическом и динамическом режимах работы).
Процессы, происходящие в этих системах, описываются линейными дифференц. уравнениями.
Для линейных систем всегда выполняется принцип суперпозиции. Для нелинейных систем он не выполняется. Принцип суперпозиции заключается в следующем.
Пусть
y(t)
= Aix(t),
тогда, если

то
Нелинейной системой называется такая система, в которой хотя бы в одном звене нарушается линейность статической характеристики или же имеет место любое другое нарушение линейности уравнений динамики этого звена. Например, произведение переменных или их производных, корень, квадрат или более высокая степень переменной, любая другая нелинейная связь переменных или их производных.
Все реальные САУ обычно являются нелинейными, но САУ с несущественной нелинейностью характеристик линеаризуют. Несущественно нелинейные характеристики не содержат разрывов непрерывности. Существенно нелинейные характеристики содержат изломы, разрывы непрерывности первого рода и т.д. Теория линейных САУ в настоящее время полностью разработана, поэтому целесообразно сводить там, где это возможно, нелинейные САУ к линейным, используя методы линеаризации. Однако нелинейные САУ богаче по своим возможностям, в том числе и в смысле улучшения качества процессов управления.
5. В зависимости от вида дифференц. уравнения линейные системы подразделяются на следующие типы:
1) Обыкновенные САУ, описываемые обыкновенными линейными дифференц. уравнениями (уравнениями типа вход-выход):

2) САУ с распределенными параметрами, описываемые дифференциальными уравнениями в частных производных, например:
где x – пространственная координата.
3) САУ с запаздыванием, описываемые линейными дифференциальными уравнениями с запаздыванием:

где - время чистого запаздывания.
4) САУ с переменными параметрами, коэффициенты в уравнениях которых зависят от времени. Такие системы называются также нестационарными системами и описываются, например, уравнениями следующего вида:
 Если
ai
= const,
т.е. параметры системы постоянны, то
она называется стационарной. При ai
= ai(t)
САУ называются нестационарными.
Если
ai
= const,
т.е. параметры системы постоянны, то
она называется стационарной. При ai
= ai(t)
САУ называются нестационарными.
Стационарной называется система, реакция которой на любой тип возмущения зависит только от интервала между данным моментом времени и моментом начала возмущения.
6. принцип суперпозиции. Принцип суперпозиции заключается в следующем.
Пусть y(t) = Aix(t), тогда, если
то
7. По степени использования при управлении информации о параметрах и структуре ОУ САУ делятся на адаптивные и неадаптивные. Адаптивные (самоприспосабливающиеся) системы обладают способностью приспосабливаться к изменению внешних условий, а также улучшать свою работу по мере накопления опыта.
Неадаптивные системы такой способностью не обладают. Они имеют постоянную настройку. Если вследствие какого-либо изменения условий работы такой системы ее настройку требуется изменить для того, чтобы сохранить заданное качество управления (н-р, точность, быстродействие), это должен сделать человек.
Область применения адаптивных САУ – это управление объектами, свойства и условия работы которых недостаточно известны или существенно непостоянны. В этих условиях неадаптивная система либо будет работать неудовлетворительно, либо потребует постоянного надзора.
Адаптивные САУ в свою очередь различаются по степени самонастройки, адаптации, оптимизации и интеллектуализации.
Экстремальные системы (системы с самонастройкой программы) – это САУ, в которых значение регулируемой величины y(t) автоматически поддерживается на экстремальном значении (максимум, минимум) при различных значениях неизвестных возмущающих воздействий f(t) (рис. 1.6). Программа изменения y(t) определяется автоматически в процессе работы САУ. В САУ добавлено специальное устройство автоматического поиска экстремума (УАПЭ), которое на основе анализа определенных характеристик ОУ (z) выдает на вход САУ воздействие g3(t). В результате УУ (регулятор) вырабатывает управляющее воздействие u(t), определяющее оптимальное поведение САУ при изменении y(t), например поддержание работы САУ на экстремальном значении y=ymax.

ос
Рис. 1.6 – Функциональная схема экстремальной системы
Обычно при
проектировании САУ всегда преследуют
экстремальную цель управления.
Экстремальные системы по существу
являются системами автоматической
стабилизации выходной величины y=yextr
или экстремума некоторого функционала
 .
В последнем случае САУ решают не только
задачу экстремального управления, но
и задачу оптимизации, т.е. являются
оптимальными САУ.
.
В последнем случае САУ решают не только
задачу экстремального управления, но
и задачу оптимизации, т.е. являются
оптимальными САУ.
Системы с самонастройкой параметров (самонастраивающиеся системы) – это системы, в которых автоматически в зависимости от заранее неизвестных внешних условий (по f, g) устанавливаются оптимальные значения параметров системы. Следовательно, УУ работает таким образом, чтобы регулируемая величина на выходе САУ изменилась по наивыгоднейшему (оптимальному) закону в соответствии с априори заданным критерием качества – функционалом J. Под функционалом J могут рассматриваться сложные функции полезности, максимума прибыли, минимума потерь или минимума расхода энергии при работе САУ и т.п. В роли J могут быть использованы простые оценки качества процессов, например: минимум длительности переходного процесса tn=min или минимум среднеквадратичной ошибки управления x2=min и т.п.

Рис. 1.7 – Функциональная схема самонастраивающейся САУ
В схему самонастраивающейся САУ (рис. 1.7) входит устройство самонастройки (УСН) – анализатор качества или оптимизатор, который определяет отклонение характеристик замкнутой САУ от желаемых (эталонных) и в зависимости от состояния системы – некоторой функции F(x,g,z,y) – воздействует на УУ. Следовательно, такие системы – это системы с самооптимизацией или иначе, адаптивные САУ со стабилизацией качества (оптимальные по быстродействию, по точности, по технико-экономическим показателям и т.п.).
Системы с самонастройкой структуры называются также самоорганизующимися или самоалгоритмизирующимися системами, в которых в зависимости от неопределенных внешних условий производится оптимальная настройка структуры таким образом, чтобы регулируемая величина на выходе изменилась по наивыгоднейшему (оптимальному) закону в соответствии с заданным критерием качества J (в простейшем случае, например, минимум ошибки управления). Автоматический поиск наивыгоднейшей (оптимальной) структуры САУ дает возможность решать более сложные задачи при управлении сложными ОУ – комплексами.
В схеме САУ с самонастройкой структуры (рис. 1.8) идентификатор производит сбор и обработку информации о работе ОУ. САУ строится как система принятия решений об управлении сложным ОУ.
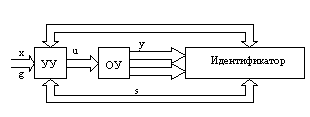
Рис. 1.8 – Схема САУ с самонастройкой структуры
Системы комбинированного типа с самонастройкой структуры и параметров объединяют в своем составе определенные фрагменты рассмотренных выше структур. Все эти САУ являются также и оптимальными САУ.
В последние два десятилетия интенсивно разрабатывается новый класс САУ, получивший название интеллектуальные системы управления (ИСУ). В связи с возникновением этого класса САУ отметим, что в классическом понимании САУ, включающие разнообразные ОУ, воспринимались как системы, процессы в которых принципиально прогнозируемы и управляемы. Ошибки в управлении и неработоспособность систем часто рассматривались как недостаток априорных знаний (обычно об ОУ). Наращивание объема знаний в процессе эксплуатации САУ (принцип обучения и самообучения) привело к созданию обучающихся адаптивных САУ с гибкими алгоритмами управления (в том числе и процедурами принятия решений) и идентификации ОУ. Обучающиеся адаптивные САУ – это системы с накоплением, запоминанием и анализом информации о поведении сложного ОУ, среды функционирования и САУ в целом с изменением алгоритмов управления в зависимости от опыта и условий работы. Логика развития подобных проблем определила создание ИСУ, которые строятся как самообучающиеся, самонастраивающиеся системы с гибкими процедурами принятия решений об управлении, как системы, основанные на знаниях и формирующие новые знания в процессе управления и функционирования. ИСУ разрабатываются и как экспертные системы, встроенные в контур управления и работающие, в частности, в интерактивном режиме с лицом, принимающим решение.
8. При создании САУ одной из первоочередных задач, является математическое описание системы. Математическое описание (построение математической модели САУ) сопровождается разбиением системы на звенья и описанием этих звеньев. Совокупность описаний (уравнений, характеристик) отдельных звеньев определяет математическое описание или характеристики системы в целом.
При изучении принципа действия САУ рассматривалась ее функциональная схема, в которой САУ разбита на звенья исходя из их назначения. При математическом описании САУ разбивают на звенья по другому принципу: исходя из удобства получения этого описания. Для этого систему разбивают на возможно более простые «мелкие» звенья направленного действия, которые передают воздействия только в одном направлении – от входа на выход. При этом предполагается, что изменение состояния такого звена не влияет на состояние предшествующего звена, работающего на его вход. Именно поэтому при разбиении САУ на звенья направленного действия математическое описание каждого звена может быть составлено без учета его связей с другими звеньями. Соответственно математическое описание всей системы в целом может быть получено как совокупность составленных независимо друг от друга математических описаний или характеристик отдельных звеньев, дополненных уравнениями связей между звеньями. При этом целесообразно, чтобы каждое звено в динамике описывалось дифференциальным уравнением не выше второго порядка.
Независимое математическое описание звеньев позволяет легко составить структурную схему системы. Структурная схема системы состоит из прямоугольников, изображающих звенья системы, и стрелок, соединяющих входы и выходы звеньев. Стрелки показывают не только связи между звеньями, но также и внешние воздействия, приложенные к отдельным звеньям системы. Каждому звену структурной схемы придается описывающее его уравнение или характеристика. Обычно эта характеристика или уравнение записывается прямо внутри прямоугольника, изображающего звено. Структурная схема определяет основу математического описания САУ.
9. Динамические свойства линейных звеньев САУ в целом могут быть описаны либо аналитически в виде уравнений, связывающих выходные и входные величины звена, либо графически в виде характеристик, описывающих ту же связь.
В ТАУ применяются два типа таких характеристик: временные (переходные) и частотные.
Характеристики могут быть рассчитаны и построены по уравнению звена или сняты экспериментально. По экспериментально полученным характеристикам можно составить уравнение звена. С помощью этик характеристик можно определить реакцию на любое воздействие (возмущение) произвольного вида, так как для линейных систем справедлив принцип суперпозиции,
Из этой формулы следует, что если нам известны реакции линейной системы на элементарные (типовые) возмущения, то мы можем определить реакцию линейной системы на любое произвольное воздействие. В ТАУ применяются два вида типовых воздействий: типовые функции времени; типовые гармонические сигналы. На основе типовых функций времени определяются временные (переходные) характеристики, а на основе типовых гармонических сигналов – частотные характеристики. Таким образом, временные (переходные) и частотные характеристики однозначно связаны с уравнением звена (САУ) и наряду с ним является исчерпывающим описанием динамических свойств звена (САУ).