

6. Эпюра — особый вид графиков.
Построение эпюр и методы сечений.
метод позволяет определить внутренние силы, действующие в сечениях, и называется методом сечений балка разбивается на конечное число сечений (сечения считаются в местах появления сил, моментов, изменения диаметров балки) где высчитываются силы внутренних сопротивлений балки, изгибающие моменты, линейные деформации. по полученным расчетам строятся эпюры сил, изгибающих моментов, линейных деформаций и тд по эпюре находится сечение с наибольшим изгибающим моментом, вот оно и принимается за расчетное и используется при проверке прочности балки на изгиб кручение и тд.
Алгоритм построения эпюр:
1. Стержень разбить на участки.Границами участков являются сечения, где:
- приложены внешние сосредоточенные усилия (сила, момент);
- начинается или заканчивается распределенная нагрузка
- имеется перелом оси стержня.
2. Сделать необходимые расчет
3. Построить графики (эпюры) соблюдая следующие правила:
- провести базовую линию эпюры параллельно оси конструкции;
- в характерных (граничных) сечениях указать абсолютные значения ординат (без указания размерности);
- поле эпюры штриховать линиями, перпендикулярными базисной линии;
- знак ставить в кружочке в положительной (+) и в отрицательной (-) областях эпюры;
- рядом с базисной линией нанести обозначение и размерность.
8.
Механические свойства металлов и сплавов определяются испытаниями стандартных образцов на растяжение, изгиб, сжатие, кручение, срез, твердость, удар и усталость. Сварные соединения испытывают на растяжение сварного соединения и металла шва, определяют твердость металла шва и соединения, ударную вязкость металла шва и прочность на изгиб сварного соединения.
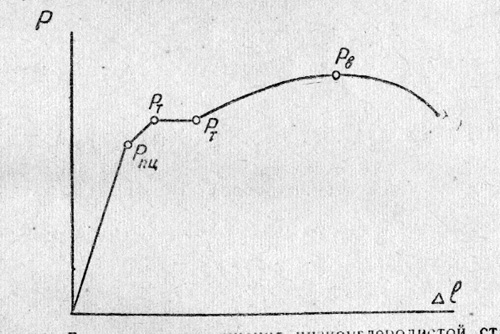
характеристики металла:
а) предел пропорциональности
σпц = Pпц / F0
где σпц- предел пропорциональности, кг/мм2; Pпц — максимальное усилие (кг), при котором еще сохраняется прямая пропорциональность между удлинением образца и усилием; F0 — площадь поперечного сечения образца до испытания, мм2; б) предел текучести
στ = Pτ / F0
где στ — предел текучести, кг/мм2; Pτ - усилие (кг), при котором удлинение образца происходит за счет пластического растяжения при постоянной величине нагрузки;
F0 — площадь поперечного сечения образца до испытания, мм2;
в) предел прочности
σb= Pb/ F0
где σb — предел прочности при растяжении, кг /мм2; Рb — максимальное усилие при испытании на разрыв, кг:
F0 — площадь поперечного сечения образца до испытания, мм2;
г) относительное удлинение
δ = (l - l0) / l0
где δ — относительное удлинение образца;
l — длина образца после разрыва, мм;
l0 — первоначальная расчетная длина образца, мм;
д) относительное сужение поперечного сечения.
ψ = (F0 - F ) / F0
где ψ —относительное сужение; F0 — площадь поперечного сечения образца до испытания, мм2;
F — наименьшая площадь поперечного сечения образца после разрыва, мм2.
9. Моментом силы называют взятое с соотв. Знаком произведение велечины силы на ее плече
Понятия «вращающий» и «крутящий» моменты в общем случае не тождественны, так как в технике понятие «вращающий» момент рассматривается как внешнее усилие, прикладываемое к объекту, а «крутящий» — внутреннее усилие, возникающее в объекте под действием приложенных нагрузок (этим понятием оперируют в сопротивлении материалов).
Если
имеется материальная точка ![]() ,
к которой приложена сила
,
к которой приложена сила ![]() ,
то момент силы относительно точки
,
то момент силы относительно точки ![]() равен
векторному произведению радиус-вектора
равен
векторному произведению радиус-вектора ![]() ,
соединяющий точки O и OF,
на вектор силы
:
,
соединяющий точки O и OF,
на вектор силы
:
![]() .
.
m 0(F)= +-Fh
7. С технической точки зрения опорные закрепления конструкций весьма разнообразны. Наиболее часто встречаются: шарнирно-подвижная опора (рис.1а), шарнирно-неподвижная опора (рис.1,б) и жесткое защемление, или заделка (рис.1,в).

Рис. 1
В шарнирно-подвижной опоре возникает одна опорная реакция, перпендикулярная опорной плоскости. Такая опора лишает опорное сечение одной степени свободы, то есть препятствует смещению в направлении опорной плоскости, но допускает перемещение в перпендикулярном направлении и поворот опорного сечения. В шарнирно-неподвижной опоре возникают вертикальная и горизонтальная реакции. Здесь невозможны перемещения по направлениям опорных стержней, но допускается поворот опорного сечения. В жесткой заделке возникают вертикальная и горизонтальная реакции и опорный момент. При этом опорное сечение не может смещаться и поворачиваться. При расчете систем, содержащих жесткую заделку, возникающие опорные реакции можно не определять, выбирая при этом отсеченную часть так, чтобы заделка с неизвестными реакциями в нее не попадала. При расчете систем на шарнирных опорах реакции опор должны быть определены обязательно.
5.Плоская система сходящихся сил.
Теорема: Силу, приложенную к абсолютно твердому телу можно, не изменяя оказыв. ею действия, переносить из данной точки в любую другую точку тела, прибавляя при этом пару с моментом, равным моменту переносимой силы относительно точки, куда сила переносится.
Главным вектором системы сил называется сумма всех сил.
Сумма моментов пар равна сумме самих заданных сил относительно 0. Необходимым и достаточными условиями равновесия плоской произвольной системы сил является равенства нулю ее главного вектора и главного момента.
10. Фрикционная передача — кинематическая пара, использующаяся для передачи механической энергии силы трения.
Трение между элементами может быть сухое, граничное, жидкостное. Жидкостное трение наиболее предпочтительно, так как значительно увеличивает долговечность фрикционной передачи.
Достоинства:
-Простота
-Безступенчатость регулирования скорости
-Низская стоимость
Недостатки:
-Невозможно обеспечить точное передаточное отношение из-за проскальзывания
-большая нагрузка на оси
-повышенный износ
11.
Пусть к твердому телу приложена плоская
система сил ![]() (рис.1.16). Возьмем
в теле произвольную точку
(рис.1.16). Возьмем
в теле произвольную точку ![]() ,
которую будем называть центром
приведения,
и приложим к ней попарно уравновешенные
силы
,
которую будем называть центром
приведения,
и приложим к ней попарно уравновешенные
силы ![]() и
и ![]() . Заметим,
что силы
. Заметим,
что силы ![]() и
и ![]() образуют
при этом пару сил, так что можно считать
силу
перенесенной
параллельно самой себе в точку
-
замененной силой
образуют
при этом пару сил, так что можно считать
силу
перенесенной
параллельно самой себе в точку
-
замененной силой ![]() с
присоединением пары
с
присоединением пары ![]() .
Поступив так и со всеми оставшимися
силами, мы приведем заданную систему
сил к совокупности пучка сил
.
Поступив так и со всеми оставшимися
силами, мы приведем заданную систему
сил к совокупности пучка сил ![]() ,
приложенных в
точке
,
и совокупности пар
,
приложенных в
точке
,
и совокупности пар ![]() .
Сходящиеся силы имеют равнодействующую
.
Сходящиеся силы имеют равнодействующую![]() ,
приложенную в точке
и
равную векторной сумме всех сил системы.
Эта сумма называетсяглавным
вектором системы и
обозначается
,
приложенную в точке
и
равную векторной сумме всех сил системы.
Эта сумма называетсяглавным
вектором системы и
обозначается ![]() .
.
Пары
можно заменить одной результирующей
парой с моментом ![]() , равным
алгебраической сумме их
моментов. Так как момент пары равен
сумме моментов входящих в нее сил
относительно любой точки плоскости
пары, то для каждой из складываемых
пар
, равным
алгебраической сумме их
моментов. Так как момент пары равен
сумме моментов входящих в нее сил
относительно любой точки плоскости
пары, то для каждой из складываемых
пар
![]() .
.
Поэтому
сумма моментов пар равна сумме моментов
самих заданных сил относительно
точки
, которая
называется главным
моментом системыотносительно
этой точки и обозначается ![]() . Таким
образом, систему
сил, произвольно расположенных на
плоскости, можно заменить совокупностью
одной силы
,
равной их главному вектору
,
и приложенной в произвольно выбранном
центре приведения, и одной пары, момент
которой
равен
главному моменту
заданных
сил относительно центра приведения. Это
утверждение называется теоремой Пуансоо
приведении плоской системы сил к данному
центру.
. Таким
образом, систему
сил, произвольно расположенных на
плоскости, можно заменить совокупностью
одной силы
,
равной их главному вектору
,
и приложенной в произвольно выбранном
центре приведения, и одной пары, момент
которой
равен
главному моменту
заданных
сил относительно центра приведения. Это
утверждение называется теоремой Пуансоо
приведении плоской системы сил к данному
центру.
Главный вектор и главный момент системы определяются по формулам:
![]() ,
, ![]()
13. Необходимым и достаточным условием равновесия системы сил является равенство нулю главного вектора и главного момента. Для плоской системы сил эти условия получают вид Fo=åFk=0, МОz=åМoz(Fk)=0, (5.15), где О– произвольная точка в плоскости действия сил. Получим: Fox=åFkx=F1x+F2x+…+Fnx=0, Pox=åFky=F1y+F2y+…+Fny=0, МОz=åMOz(Fk)=Moz(F1)+Moz(F2)+…+Moz(Fn)=0, т. е. для равновесия плоской системы сил необходимо и достаточно, чтобы алгебраические суммы проекций всех сил на две координатные оси и алгебраическая сумма моментов всех сил относительно произвольной точки равнялись нулю. Второй формой уравнения равновесия является равенство нулю алгебраических сумм моментов всех сил относительно любых трех точек, не лежащих на одной прямой; åMAz(Fk)=0, åMBz(Fk)=0, åMCz(Fk)=0, (5.17), где A, В и С– указанные точки. Необходимость выполнения этих равенств вытекает из условий (5.15). Докажем их достаточность. Предположим, что все равенства (5.17) выполняются. Равенство нулю главного момента при центре приведения в точке А возможно, либо если система приводится к равнодействующей (R≠0) и линия ее действия проходит через точку А, либо R=0; аналогично равенство нулю главного момента относительно точек В и С означает, что либо R≠0 и равнодействующая проходит через обе точки, либо R=0. Но равнодействующая не может проходить через все эти три точки А, В и С (по условию они не лежат на одной прямой). Следовательно, равенства (5.17) возможны лишь при R=0, т. е. система сил находится в равновесии. Заметим, что если точки А, В и С лежат на одной прямой, то выполнение условий (5.17) не будет достаточным условием равновесия, — в этом случае система может быть приведена к равнодействующей, линия действия которой проходит через эти точки.