

Алгоритмы ива(15), ивб(16) импульсный вывод групп а и б
Алгоритм применяется в тех случаях, когда контроллер должен управлять исполнительным механизмом постоянной скорости.
Алгоритм преобразует сигнал, сформированный алгоблоками контроллера (в частности, алгоритм импульсного регулирования) в последовательность импульсов переменной скважности. Алгоритм выдает последовательность указанных импульсов на средства дискретного вывода контроллера (ЦДП). Назначение входов выходов алгоритма приведено в табл. 13. Функциональная схема алгоритма приведена на рис.81.
Каждый алгоритм обслуживает до четырех импульсных выходов. Каждый импульсный выход состоит из двух дискретных выходов с общей точкой. Число обслуживаемых выходов m устанавливается модификатором алгоритма.
Каждый канал алгоритма ИВА (ИВБ) содержит широтноимпульсный модулятор (ШИМ), преобразующий входной сигнал X в последовательность импульсов со скважностью Q, пропорциональной входному сигналу: Q=X/100. При Х>100% скважность Q=1. Если Х>0, импульсы формируются в выходной цепи "больше", если Х<0, то в цепи "меньше". При Х=0 выходной сигнал равен нулю.
Параметр Т задает минимальную длительность выходного импульса. Этот параметр устанавливается в диапазоне 0,12≤Т≤З,84 сек и округляется до значения, кратного времени цикла контроллера.
Параметр N определяет, к какому контуру регулирования относится данный канал алгоритма ИВА (ИВБ). Задание этого параметра необходимо лишь в том случае, когда требуется, чтобы синхронно с формированием выходных импульсов на лицевой панели контроллера зажигались ламповые индикаторы "больше", "меньше". Например, если установлен параметр N1=1, то при работе ШИМ1 на лицевой панели будут зажигаться индикаторы при вызове 1-го контура.
Масштаб времени отсутствуют.
 Таблица
13.
Таблица
13.
Алгоритмы ваа(07), ваб(08) ввод аналоговый группы а и б
Алгоритмы применяются для связи функциональных алгоритмов с аппаратными средствами аналогового входа - аналого-цифровым преобразователем (АЦП). Для связи с аналоговыми входами группы А и Б используются соответственно алгоритмыBAA и ВАБ. Каждый алгоритм обслуживает до 8 аналоговых входов.
Помимо связи с АЦП алгоритмы ВАА и ВАБ позволяют корректировать диапазон входного аналогового сигнала в двух точках, соответствующих 0 и 100 % диапазона.
Алгоритм содержит несколько независимых идентичных каналов. Число каналов 0<=т<=8 и задается модификатором. Каждый канал связан с соответствующим (номеру) аналоговым входом контроллера. Эта связь образуется, как только алгоритм ВАА и ВАБ вводится в один из алгоблоков контроллера. К входному аналоговому сигналу добавляется сигнал смещения Хсм, полученная сумма умножается на коэффициент Км. Эти операции позволяют компенсировать смещение нуля и диапазона, как АЦП, так и датчика, подключенного к контроллеру.
Выходной сигнал канала равен:
Yi=(Xi+XCM,i).KM,i
где Х1 - аналоговый входной сигнал, поступающий от АЦП на i-ый канал.
Если коррекции не требуется, устанавливается XCм,i=0; KM,i=1. В этом случае Y|=X|.
Входы выходы алгоритма приведены в табл.14.
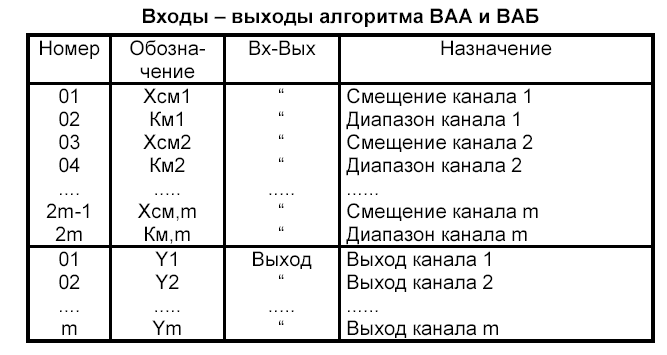
Таблица 14.