Выполнения расчётов, подтверждающих работоспособность разработанного средства технологического оснащения. Выбор и расчёт привода для наплавочной головки.
Приводом для данного движения является асинхронный двигатель и переходящий от него понижающий редуктор.
Для правильного выбора привода необходима скорость наплавки V=0.2 м/мин.
Перемещение головки осуществляется вращением винта с трапециидальной резьбой. Шаг резьбы-6мм.
Следовательно, частота вращения винта-n=30.1 об/мин.
Мощность на рычаге определяется по формуле:

Где F=mg-сила тяжести
F=11.4 9.8=111.72Н.
9.8=111.72Н.
Таким
образом:

Требуемая мощность электродвигателя учитывая КПД составляющих механизмов привода определяется по формуле:

Где


Принимаем
асинхронный электродвигатель типа
АИР112MB12/6
с номинальной мощностью
 и частотой вращения n=460
об/мин.
и частотой вращения n=460
об/мин.
Необходима установка следующих элементов привода:
Клиноременная передача;
Цилиндрическая передача(одноступенчатый редуктор) u=2,5. В качестве цилиндрической передачи принимаем одноступенчатый редуктор ЦУ-100ГОСТ 25301-82.
Основные характеристики редуктора:
Передаточное число-u=2.5;
Межосевое расстояние-

Модуль зубьев-m=2;
Число зубьев ведущего колеса -

Число
зубьев ведомого колеса - .
.
Расчёт клиноременной передачи
Расчёт клиноременной передачи ведём согласно ГOCT 1284.3-96.
Крутящий момент на выходном валу электродвигателя Т=14,4Нм. Такому крутящемe моменту удовлетворяет сечение Z(0) нормального ремня,
Диметр
ведущего шкива

Рассчитаем геометрические параметры передачи.
Диаметр
ведомого шкива:

Уточняем передаточное отношение:

где =(0,01…..0,02)-коэффициент
упругого скольжения.
=(0,01…..0,02)-коэффициент
упругого скольжения.
Устанавливаем межосевое расстояние:

Принимаем

Расчётная длина ремня:

Принимаем согласно стандартную длину ремня:
L=1400мм
Уточняем межосевое расстояние:
 =
=
Угол обхвата ремнем малого шкива:

Скорость ремня:

Необходимое число ремней:

Принимаю число ремней Z=3.
Сила предварительного натяжения одного ремня:



Сила, действующая на вал:

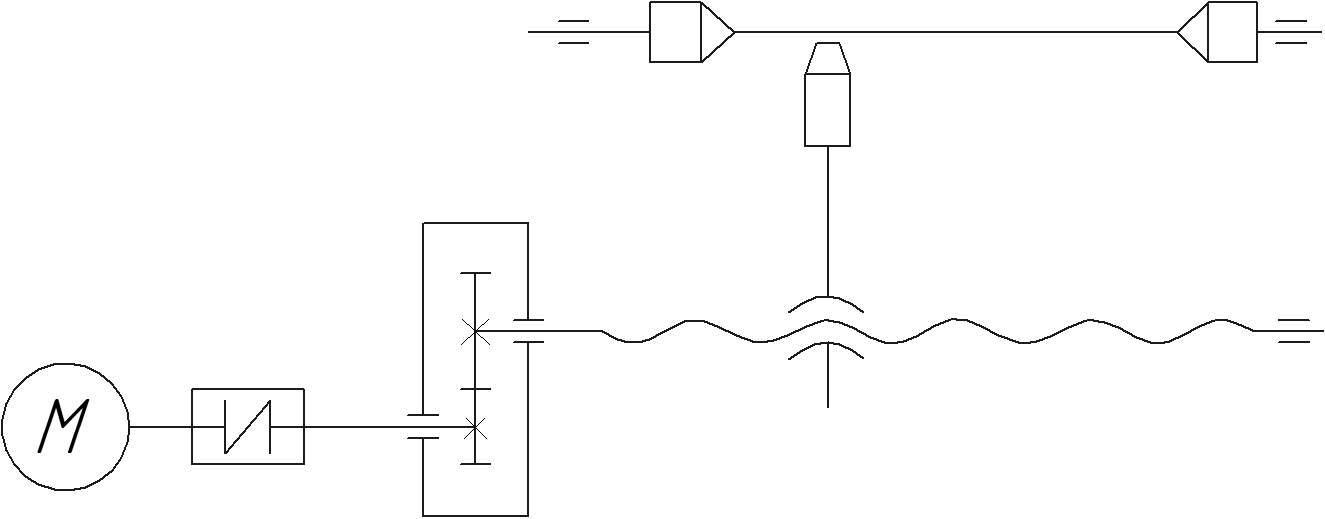
Разработка кинематической схемы технологического оснащения
Под схемой, согласно ГОСТ 2.102–68, понимается документ, на котором показаны в виде условных изображений составные части изделия и связи между ними. Схемы подразделяются на кинематические, электрические, пневматические, гидравлические, оптические и комбинированные, например, электропневматические. В конструкторской части проекта разрабатываются кинематические или комбинированные схемы.
Элементы схемы изображаются без соблюдения масштаба в соответствии с установленными на них стандартами графическими обозначениями (символами). Элементы, обозначения которых стандартом не предусмотрены, изображаются произвольно, но достаточно наглядно, в виде контура изображаемого элемента и снабжаются надписью с указанием вида элемента или его наименования.
При необходимости на схеме допускается показывать элементы схем другого вида (например, на кинематической схеме гидроцилиндры, электрические элементы, на оптической – элементы кинематические), если они непосредственно влияют на работу схемы этого вида. Можно также изображать элементы, не входящие в состав изделия, но необходимые для понимания его работы. Указанные элементы ограничиваются условной штрих пунктирной линией.
Элементы, составляющие функциональные группы, допускается выделять штрихпунктирными линиями с указанием наименования или назначения группы. Для наглядности и уяснения расположения элементов схемы разрешается вписывать ее в контур изделия.
На схемах помещаются технические данные (наименования, обозначения, характеристики) элементов и групп, а также текстовые указания и пояснения, необходимые, в частности, для описания работы изделия и расчетов.
Кинематическая схема стенда: