

Построение естественной механической
ХАРАКТЕРИСТИКИ
ДПТ С НВ
в координатах
![]() ведется по двум точкам
ведется по двум точкам
[![]() ,
,![]() ],[
],[![]() ,
,
![]() ],
],
где ![]() ;
;
![]() ;
(П3.4)
;
(П3.4)
![]() ;
;
![]() .
.
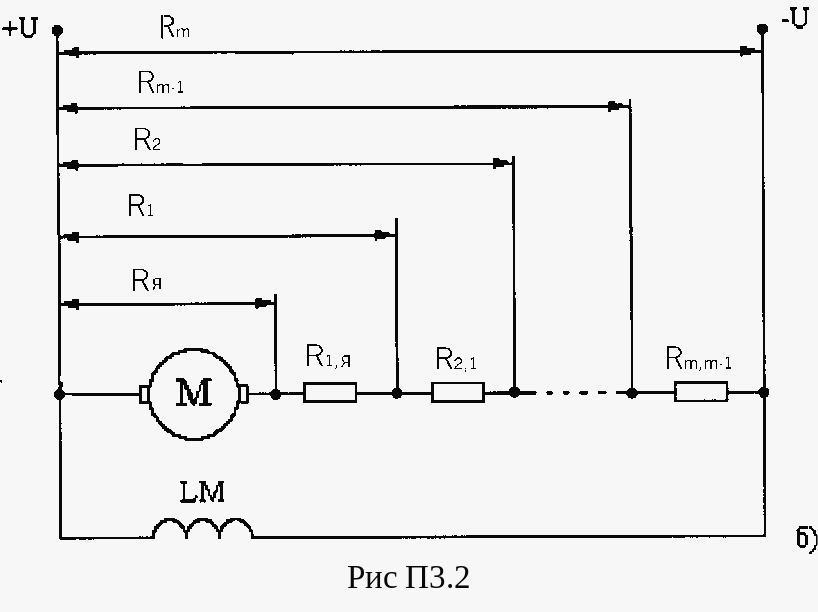
РАСЧЕТ
СОПРОТИВЛЕНИЙ СЕКЦИЙ ПУСКОВОГО РЕОСТАТА
для схемы реостатного пуска
с
НВ
начинается с построения механических
характеристик, на которых двигатель
должен работать в процессе пуска. Удобнее
пользоваться характеристиками
![]() (рис.П3.2а).
(рис.П3.2а).
RRm
RRm-1
Сначала
строится естественная электромеханическая
характеристика и на оси абсцисс отмечают
значения статического тока
![]() ,
наибольшего тока при пуске
,
наибольшего тока при пуске
![]() (точка a) и минимального пускового тока
или тока переключения
(точка a) и минимального пускового тока
или тока переключения
![]() (точка b). Значения этих токов выбираются
из условий:
(точка b). Значения этих токов выбираются
из условий:
![]() ;
;
![]() .
.
Соединяя
точки
![]() прямой, получим искусственную
характеристику двигателя при работе с
полным пусковым сопротивлением. Ток
двигателя при неподвижном якоре будет
больше тока
,
соответствующего статическому моменту,
и двигатель начнет ускоряться. По мере
разгона двигателя ток якоря уменьшается,
одновременно уменьшается ускорение.
Для предотвращения этого при значении
тока
(точка b) пусковое сопротивление уменьшают
так, чтобы ток возрос снова до значения
I1 (точка c) и двигатель перешел на новую
искусственную характеристику
прямой, получим искусственную
характеристику двигателя при работе с
полным пусковым сопротивлением. Ток
двигателя при неподвижном якоре будет
больше тока
,
соответствующего статическому моменту,
и двигатель начнет ускоряться. По мере
разгона двигателя ток якоря уменьшается,
одновременно уменьшается ускорение.
Для предотвращения этого при значении
тока
(точка b) пусковое сопротивление уменьшают
так, чтобы ток возрос снова до значения
I1 (точка c) и двигатель перешел на новую
искусственную характеристику
![]() .
Процесс разгона двигателя продолжится
по линии
.
Процесс разгона двигателя продолжится
по линии
![]() с выходом на естественную характеристику
(точка
с выходом на естественную характеристику
(точка
![]() )
и переходом в рабочую точку
)
и переходом в рабочую точку
![]() .
При правильно подобранных ступенях
пускового сопротивления выход на
естественную характеристику должен
происходить при токе
(точка
).
Если это не получается, то нужно сделать
новое графическое построение пусковой
диаграммы, изменив значение тока
.
.
При правильно подобранных ступенях
пускового сопротивления выход на
естественную характеристику должен
происходить при токе
(точка
).
Если это не получается, то нужно сделать
новое графическое построение пусковой
диаграммы, изменив значение тока
.
Обозначим
число искусственных характеристик
пусковой диаграммы-
![]() и введем индексы пусковых сопротивлений
в соответствии со схемой включения
двигателя (рис.П3.2.б). Возьмем любой
переход с одной искусственной
характеристики на другую, например, из
точки
и введем индексы пусковых сопротивлений
в соответствии со схемой включения
двигателя (рис.П3.2.б). Возьмем любой
переход с одной искусственной
характеристики на другую, например, из
точки
![]() в точку
в точку
![]() ,
обозначив этот переход как переход с
пусковой ступени
на пусковую ступень
,
обозначив этот переход как переход с
пусковой ступени
на пусковую ступень
![]() .
За время переключения двигатель вращается
с некоторой постоянной скоростью и
имеет Э.Д.С. вращения
.
За время переключения двигатель вращается
с некоторой постоянной скоростью и
имеет Э.Д.С. вращения
![]() .
Тогда:
.
Тогда:
![]() ,
,
![]() и
и
![]() .
.
Аналогичные соотношения токов могут быть получены при правильно рассчитанной диаграмме для всех ступеней, т.е.
![]() .
.
Если
обозначить
![]() (кратность пусковых токов), то получим:
(кратность пусковых токов), то получим:
 (П3.5)
(П3.5)
Из
последнего уравнения имеем:
![]() ,
(П3.6)
,
(П3.6)
откуда
![]() .
(П3.7.)
.
(П3.7.)
Принят следующий порядок расчета пусковых сопротивлений.
1)
Так как в точке а
![]() и
и
![]() определяют
определяют
![]() по формуле
по формуле
![]() .
.
2)
Задаются величиной
![]() .
.
3) Определяют число ступеней по формуле (П3.7). Если получается дробным, его округляют до целого числа и по формуле (П3.6) уточняют значение для его использования в дальнейших расчетах.
4)
По известным значениям
,
и
по соотношениям (П3.5) определяют общие
сопротивления цепи якоря на каждой
ступени
![]() .
.
Величины сопротивлений, выключаемых на каждой ступени, находятся как разность значений общих сопротивлений на соседних ступенях:
Б. Асинхронный электродвигатель с фазным ротором
Паспортные
данные асинхронного электродвигателя:
номинальная мощность
,кВт;
номинальное напряжение
,B;
номинальная скорость вращения вала
![]() ,об/мин;
коэффициент полезного действия н;
коэффициент мощности
,об/мин;
коэффициент полезного действия н;
коэффициент мощности![]() ;
перегрузочная способность двигателя
по моменту
;
перегрузочная способность двигателя
по моменту![]() .
.
ПОСТРОЕНИЕ ЕСТЕСТВЕННОЙ МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКИ АД проводят после определения значений следующих переменных:
синхронная скорость
 ,
рад/сек,
,
рад/сек,
где ![]() -
частота тока статора;
-
частота тока статора;
![]() -
число пар полюсов обмотки статора;
-
число пар полюсов обмотки статора;
номинальная скорость
 ;
;номинальный (электромагнитный) момент двигателя
![]() ,
Н м;
,
Н м;
4)
максимальный (критический) момент
![]() ;
;
*)
![]() можно
вычислить по известным параметрам
обмоток статора и ротора
можно
вычислить по известным параметрам
обмоток статора и ротора
 .
.
Здесь и далее индекс 1 означает принадлежность параметра обмотке статора, индекс 2 – обмотке ротора, индекс ‘ – приведение к статору. Знак плюс соответствует двигательному режиму работы, знак минус - генераторному.
5)
номинальное скольжение
![]() ;
;
6) критическое скольжение
![]() ;
;
*) sк можно вычислить по известным параметрам обмоток статора и ротора
 .
.
Теперь
задаваясь значениями скольжения
![]() от
0 до 1, вычисляют момент двигателя по
формуле
от
0 до 1, вычисляют момент двигателя по
формуле
 (П3.8)
(П3.8)
и
строят естественную механическую
характеристику
сначала в координатах
![]() ,
а затем в координатах
,
а затем в координатах
![]() .
.
ЗАМЕНА
ЕСТЕСТВЕННОЙ МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКИ
АД ПРЯМОЙ ЛИНИЕЙ
возможна при работе двигателя со
скольжением от 0 до
![]() . Это имеет место при нормальной работе
двигателя и при реостатном пуске, когда
двигатель разгоняется по прямолинейным
участкам ряда механических характеристик.
Тогда в формуле (П3.8) можно пренебречь
отношением
. Это имеет место при нормальной работе
двигателя и при реостатном пуске, когда
двигатель разгоняется по прямолинейным
участкам ряда механических характеристик.
Тогда в формуле (П3.8) можно пренебречь
отношением
![]() по сравнению с отношением
по сравнению с отношением
![]() .
В результате механическая характеристика
двигателя будет иметь вид линейной
зависимости момента от скольжения:
.
В результате механическая характеристика
двигателя будет иметь вид линейной
зависимости момента от скольжения:
![]() .
.
На естественной механической характеристике коэффициент С равен:
![]() ,
,
а на искусственной механической характеристике
![]() ,
,
где
![]() -
активное сопротивление обмотки ротора;
-
активное сопротивление обмотки ротора;
![]() -
дополнительное сопротивление в цепи
ротора.
-
дополнительное сопротивление в цепи
ротора.
Внутреннее
сопротивление фазы роторной обмотки
и номинальное сопротивление ротора
![]() определяют по паспортным данным
двигателя:
определяют по паспортным данным
двигателя:
![]() ,
,
![]() ,
,
где ![]() -
Э.Д.С. неподвижного разомкнутого ротора;
-
Э.Д.С. неподвижного разомкнутого ротора;
![]() -
номинальный ток ротора.
-
номинальный ток ротора.
Рассмотрим ПОСТРОЕНИЕ ИСКУССТВЕННОЙ МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКИ АД при изменении дополнительного активного сопротивления в цепи ротора . Как известно, сопротивление изменяет критическое скольжение в соответствии с формулой
и
не оказывает влияния на величину
критического момента
![]() .
.

рис.П3.3
На
рис.П3.3 приведены примерные естественная
и искусственная механические характеристики
.
Для любого
![]() значения момента
значения момента
![]() указаны значения скольжения на этих
характеристиках
указаны значения скольжения на этих
характеристиках
![]() ,
,
![]() .
Аналогично показаны значения критического
скольжения
.
Аналогично показаны значения критического
скольжения
![]() и
и
![]() .
На основании формулы (П3.8) имеем:
.
На основании формулы (П3.8) имеем:
 ,
,
откуда
![]() .
.
Это равенство имеет место при условии (без доказательства):
![]()
или
![]() .
.
Подставляя
сюда значения
![]() в соответствии с формулой, получаем
формулу для расчета искусственной
характеристики:
в соответствии с формулой, получаем
формулу для расчета искусственной
характеристики:
 . (П3.9)
. (П3.9)
Таким образом, для построения любой искусственной механической характеристики нужно иметь естественную или какую-либо искусственную характеристику и соответствующее ей значение активного сопротивления цепи ротора. Задаваясь значением скольжения на известной характеристике, по формуле (П3.9) находят скольжение на расчетной характеристике при том же значении момента. Построение проводят во всем диапазоне изменения скольжения.