

4.4. Оптимальное значение параметра системы управления
Оптимальное значение параметра выбирается в диапазоне устойчивости с учётом расчётов, сделанных в п. 4.2. и.п. 4.3.
В данном задании не оговаривается, что является более важным – качество системы в переходном или установившемся режиме. Поэтому оптимизация проводится из условия равноценности качества в обоих режимах.
Вводится условный суммарный показатель качества, являющийся суммой двух оценок – интегральной квадратичной оценки и установившейся ошибки.
Суммарная оценка качества работы системы управления:
![]() (60)
(60)
Графически зависимость (60) качества системы от параметра «kУ» в диапазоне устойчивости (43) выглядит так:

Оптимальное значение параметра для наилучшей работы системы в обоих режимах определяется по графику примерно:

kУ = 0,7 (61)
Если на графике зависимости суммарной оценки от параметра нет минимального экстремума, то оптимальный параметр выбирается по рекомендациям из п. 4.2.
Если диапазон устойчивости задан только одной границей, например от 0 до ∞, и чем больше значение параметра, тем лучше, то допускается принять произвольное значение параметра, такое как в других вариантах этого же задания.
При оптимальном значении параметра (61) интегральная квадратичная оценка (48) равна:
![]() (62)
(62)
А установившаяся ошибка (58) равна:
![]() (63)
(63)
Данную задачу оптимизации можно решить не только графически, как показано выше, но и более точно аналитически. Для этого определяется производная суммарной оценки (60) и приравнивается к нулю. Полученное уравнение решается относительно параметра «kУ». Корень этого уравнения, попадающий в диапазон устойчивости, и будет экстремумом функции. Если этот экстремум – минимум функции, то найденный корень и есть оптимальное значение параметра «kУ».
5. Частотный анализ системы управления
Частотный анализ подразумевает расчёт и построение частотных характеристик АФЧХ, АЧХ и ФЧХ, а также моделирование установившегося частотного режима работы системы управления.
Понятие частотных характеристик и метод их расчёта приведён в приложении 7.
5.1. Частотная передаточная функция
Частотная передаточная функция получается из передаточной функции для выходного сигнала (17):
 (64)
(64)
После преобразований и с учетом выражений для коэффициентов (18) – (22) и оптимального значения параметра системы (61) получаются вещественная и мнимая составляющие комплексной частотной передаточной функции:
![]() (65)
(65)
![]() (66)
(66)
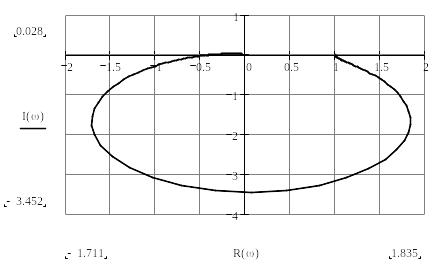
5.2. Амплитудно-фазовая частотная характеристика
Пример построения графика АФЧХ в пакете MathCAD приведён в приложении 8.
Диапазон частот выбирается как можно меньшим, для завершения построения линии графика – приближения её к началу координат.
График АФЧХ для данной системы построен в диапазоне частот от 0 до 3 рад/с.
5.3. Амплитудно-частотная характеристика
АЧХ определяется вещественной и мнимой составляющими АФЧХ по формуле:
![]() (67)
(67)
График АЧХ построен в диапазоне частот от 0 до 1.2 рад/с.
Диапазон частот выбирается как можно меньшим, немногим более полосы пропускания, для наглядного отображения пика на резонансной частоте.
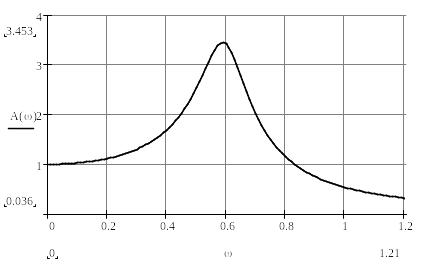
По этому графику примерно находятся следующие показатели:
Резонансная
частота:
![]() (68)
(68)
Частота
среза:
![]() (69)
(69)
Полоса
пропускания:
![]() (70)
(70)
Колебательность:
![]() (71)
(71)
5.4. Фазово-частотная характеристика
ФЧХ определяется вещественной и мнимой составляющими АФЧХ по такой формуле:
![]() (72)
(72)
В MathCAD и Excel функция «arctg(I()/R())» может быть задана двумя способами:
atan(I()/R()), возвращает угол от - / 2 до / 2;
atan2(R(),I()), возвращает угол от - до .
Рекомендуется использовать вторую функцию.
График ФЧХ строится в диапазоне частот от 0 до 1.2 рад/с.
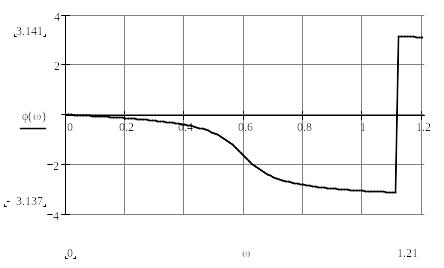
«Излом» графика происходит при достижении функцией «()» значения -. Происходит «скачок» на , с последующим дальнейшим убыванием функции.
5.5. Установившийся частотный режим работы системы управления
Входной частотный сигнал задается функцией вида
![]() (73)
(73)
Примем такие его параметры:
Амплитуда
входного сигнала:
![]() (74)
(74)
Фаза
входного сигнала:
![]() (75)
(75)
Эти значения могут быть произвольными, но для простоты рекомендуется их принять такими.
Частота сигнала соответствует резонансной частоте:
![]() (76)
(76)
Частота может быть любая из полосы пропускания, но если есть резонансная, рекомендуется принять её.
С учётом принятых параметров:
![]() (77)
(77)
Выходной сигнал определяется функцией вида:
![]() (78)
(78)
Его параметры определяются частотными характеристиками системы:
АЧХ при резонансной частоте имеет максимум и примерно равна:
![]() (79)
(79)
Эта цифра показывает, во сколько раз амплитуда на выходе больше чем на входе, значит:
Амплитуда выходного сигнала:
![]() (80)
(80)
ФЧХ при резонансной частоте примерно равна:
![]() (81)
(81)
Эта цифра показывает, на сколько фаза на выходе сдвинута по отношению к фазе на входе, значит:
Фаза выходного сигнала:
![]() (82)
(82)
С учётом вычисленных параметров:
![]() (83)
(83)
График установившегося частотного режима имеет такой вид:
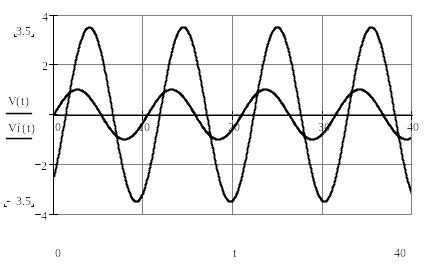
На графике отображаются входной и выходной частотные сигналы (77) и (83). Для добавления второй функции на график в MathCAD нажмите «,» (запятую) в английском регистре в маркере вертикальной оси – появится второй маркер. Тип и цвет линии графика задаётся в пункте «Формат» контекстного меню графика (правая кнопка мыши) на вкладке «traces».
6. Моделирование работы системы управления
Моделирование проводится в программе VisSim. Приёмы моделирования систем управления в программе VisSim описываются в приложении 9.
Переходная характеристика системы управления
Понятие переходной характеристики даётся в конце приложения 1.
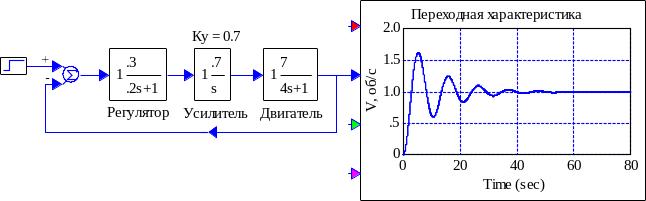
Переходная
характеристика получена при оптимальном
значении параметра
![]() .
.
Время
регулирования системы управления
примерно составляет
![]() .
.
Установившееся
значение управляемого сигнала
![]() .
.
Проверка диапазона устойчивости
В вопросе устойчивости система может быть:
устойчива (переходная характеристика в виде затухающих колебаний как в предыдущем пункте 6.1., или в любом случае выходит на постоянное «горизонтальное» значение);
неустойчива (раскачивающаяся переходная характеристика в виде «расходящихся» колебаний с резко возрастающей амплитудой, или в любом случае уходит в бесконечность вверх или вниз);
нейтральна (переходная характеристика в виде «ровных» колебаний с постоянной амплитудой – система не может вернуться в состояние равновесия, но и не уходит в бесконечность. Это наблюдается на границе диапазона устойчивости)
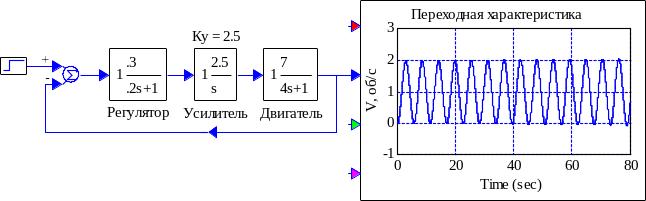
В блоке «Усилитель» значение параметра изменяется с оптимального 0.7 на границу устойчивости 2.5.
При
моделировании подтвердилось, что на
расчётной границе устойчивости (43) при
![]() – система нейтральна.
– система нейтральна.
Это подтверждает правильность найденного диапазона устойчивости (43) в пункте 4.1.