

Асинхронные исполнительные двигатели.
В качестве исполнительных АД часто используются двухфазные АД. Двухфазный АД имеет две обмотки: обмотку возбуждения и обмотку управления.
К исполнительным Д предъявляют следующие требования:
отсутствие самохода, то есть отсутствие вращения при отсутствии сигнала в обмотке управления;
линейность рабочего участка характеристики;
малая инерционность;
минимальный момент троганья;
надежность и экономичность;
возможность работы на упор.
О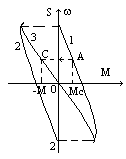 бычный
двухфазный Д имеет нелинейный рабочий
участок и работает при малых скольженьях
( точка
бычный
двухфазный Д имеет нелинейный рабочий
участок и работает при малых скольженьях
( точка
![]() ).
При отключении обмотки управления Д
переходит в точку
).
При отключении обмотки управления Д
переходит в точку
![]() характеристики 3 и продолжает вращаться
(то есть имеется самоход, что недопустимо).
Для исключения самохода исполнительные
Д имеют большое сопротивление ротора,
что обуславливает большое критическое
скольжение (
характеристики 3 и продолжает вращаться
(то есть имеется самоход, что недопустимо).
Для исключения самохода исполнительные
Д имеют большое сопротивление ротора,
что обуславливает большое критическое
скольжение (![]() ),
то есть характеристика будет выглядеть
так:
),
то есть характеристика будет выглядеть
так:
При
отключении обмотки управления Д переходит
в точку
![]() характеристики 3 и он мгновенно
останавливается. Самоход отсутствует,
за счет большого сопротивления
характеристика линейна.
характеристики 3 и он мгновенно
останавливается. Самоход отсутствует,
за счет большого сопротивления
характеристика линейна.
Управление таким Д осуществляется тремя способами: амплитудное, фазовое, амплитудно-фазовое (самое распространенное).
Важную роль у исполнительных Д играет инерционность.
Для
повышения энергетических показателей
Д (![]() и
и
![]() )
уменьшают воздушный зазор, но при этом
увеличиваются силы притяжения между
статором и ротором и увеличивается
момент троганья. Для того, что бы исключить
перекосы или биения в таких Д, их выполняют
по сквозной технологии (по сквозной
компоновке). В этом случае ротор Д и
корпуса подшипников протачиваются за
один проход. Для
уменьшения инерционности используют
малоинерционные Д
(Д с полым немагнитным ротором). Такие
Д могут работать на упор.
)
уменьшают воздушный зазор, но при этом
увеличиваются силы притяжения между
статором и ротором и увеличивается
момент троганья. Для того, что бы исключить
перекосы или биения в таких Д, их выполняют
по сквозной технологии (по сквозной
компоновке). В этом случае ротор Д и
корпуса подшипников протачиваются за
один проход. Для
уменьшения инерционности используют
малоинерционные Д
(Д с полым немагнитным ротором). Такие
Д могут работать на упор.
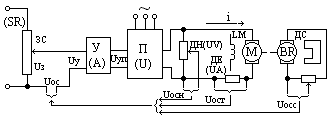
Элементы систем автоматического управления электроприводами
Элементы из которых состоит ЭП разнообразны. К ним в первую очередь относятся:
электрические машины, трансформаторы, преобразователи (чаще всего полупроводниковые), усилители (электронные, электромашинные, магнитные и др.), датчики, тахогенераторы, электрические аппараты, бесконтактные логические элементы, элементы универсальной блочной системы регулирования (УБСР), УБСР-АИ (аналоговые), УБСР-ДИ (дискретные), комплекс технических микропроцессорных средств микроДАТ и др.
Основные требования предъявляемые к системам автоматического управления электроприводами
При проектировании СУ к ним предъявляют следующие требования:
простота, гибкость и удобство управления;
высокая надежность СУ;
наличие защиты, сигнализации и индикации, возможность диагностики неисправностей;
удобство монтажа, эксплуатации и ремонта;
минимальные массогабаритные показатели;
требования охраны труда, включающие безопасность обслуживания и противопожарных мероприятий;
экономические показатели.
Автоматическое управление электроприводом.
Системы управления ЭП можно классифицировать следующим образом:
Релейные системы управления осуществляют управление системами пуска, реверсирования и торможения Д постоянного и переменного тока при питании их от сети с неизменным напряжением.
Регулируемые СУ осуществляют стабилизацию скорости и момента с заданной точностью в установившихся и переходных режимах при действии возмущений.
Следящие СУ представляют замкнутые динамические СУ отрабатывающие произвольный закон задания положения с допустимой погрешностью. К этому же классу систем относятся позиционные ЭП являющиеся частным случаем следящих систем. В этих системах отрабатывается постоянное положение с заданной погрешностью.
Программно-регулируемые СУ обеспечивают управление индивидуального или группового ЭП по заданной программе.
Адаптивные СУ осуществляют управление с учетом заранее неизвестным изменением параметров ЭП при изменении внешних возмущающих воздействий.