

Методика расчета динамической устойчивости сложных электрических систем. Метод численного интегрирования.
При возникновении КЗ в сложно системе (с учетом нескольких генераторов 3 и более) возникают качания роторов в генераторах. При моделировании данного процесса можно написать систему дифференциальных уравнений движения роторов каждого генератора. Основным методом решения диф уравнений являются квадратурные методы включая метод последовательных интервалов. При отсутствия систем моделирования на ЭВМ необходимо учитывать собственные и взаимные сопротивления для определения электромагнитной мощности генераторов. Собственные и взаимные индуктивности можно определить методом наложения, в том числе методом единичных токов.
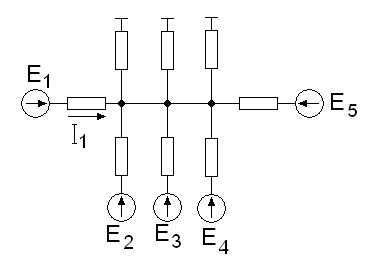
Активная мощность первого генератора определяется:



Порядок расчета динамической устойчивости сложных систем:
Находятся параметры нормального режима (Е1, Е2…δ)
Рассчитывается режим КЗ. Составляющая 3х схем последовательностей и результирующая схема.
Находятся собственные и взаимные проводимости для расчета режима КЗ.
Находим собственные и взаимные сопротивления для послеаварийного режима при отключении КЗ.
Применяют метод последовательных интервалов для момента возникновения КЗ.
Зная абсолютные углы δ1, δ2, δ3 определяют относительные углы δ12, δ23, δ13.
Определяют активные мощности генераторов при КЗ.
Определяют избытки или недостатки мощности.
Определяют угловые перемещения за промежуток времени Δt.
Определяю абсолютные значения углов к концу первого интервала δ1, δ2, δ3.
Повторяем пункты 6-10.
В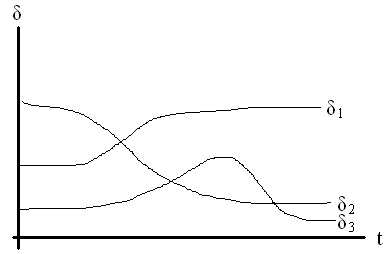 интервале времени в котором КЗ определяется
необходимо в формулах сменить собственные
и взаимные проводимости и углы α.
интервале времени в котором КЗ определяется
необходимо в формулах сменить собственные
и взаимные проводимости и углы α.
Результирующая устойчивость. Причины возникновения асинхронного хода. Особенности исследования результирующей устойчивости.
Динамическая устойчивость – это способность системы восстанавливать после большого возмущения исходное состояние или состояние практически близкое к исходному (допустимому по условиям эксплуатации системы).
Различают два вида динамической устойчивости:
1) синхронная устойчивость. 2) результирующая устойчивость – восстановление режима после кратковременного нарушения (например, при работе в течении некоторого времени генераторов электрической системы или ее части несинхронно), но при восстановлении нормальной синхронной работы после нескольких проворотов ротора. Это восстановление может происходить самостоятельно в силу внутренних свойств системы или под действием специальных устройств автоматики.
Причины возникновения асинхронного режима генераторов или части системы (группы генераторов) могут быть различны. Его может вызвать исчезновение (потеря) возбуждения, нарушение динамической устойчивости после резкого возмущения – только при нарушении статической устойчивости сильно перегруженной системы при малом возмущении.
Для большинства синхронных машин асинхронный ход не представляет опасности. Турбогенераторы в асинхронном режиме могут развивать мощность, соизмеримую с номинальной.
Допустимость асинхронного режима может вызывать сомнения в связи с опасностью нарушения устойчивости остальной части системы в которой мощный генератор или группа генераторов работают асинхронно. В этом режиме генератор обычно поглощает из системы значительную реактивную мощность, это приводит к снижению напряжения во всей системе создавая опасность нарушения устойчивости остальных генераторов и двигателей.
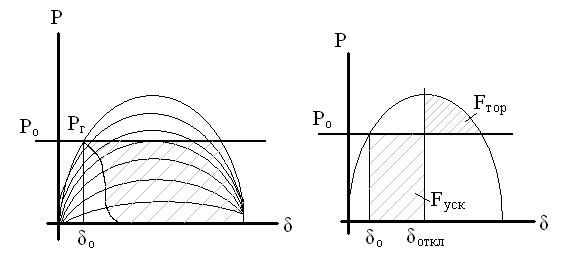
При потере возбуждения При нарушении динамиче- с ской устойчивости (Fтор≠Fуск)