

34. Энергетическая диаграмма ад. Потери и кпд ад.
Активная мощность Р1 =3U1I1cosf1 потребляемая эл. энергия из сети. Часть этой мощности Рпр1составляет мощность потерь на нагревание проводов обмотки статора. Остальная мощность преобразуется в мощность вращающегося магнитного поля Рвр.п, часть которой Рс составляет мощность потерь из-за гистерезиса и вихревых токов в сердечники статора. Мощность потерь в сердечники ротора, через который замыкается вращающий магнитный поток, практического значения не имеет, т.к. частота f2 тока в роторе весьма мала (1-3 Гц) и мощность потерь из-за гистерезиса и вихревых токов не значительна. Оставшаяся часть мощности вращающего магнитного поля составляет электромагнитную мощность ротора Рэл = Рвр.п. – Рс. Наконец, чтобы определить механическую мощность Рмех., развиваемую ротором, из электромагнитной мощности нужно вычесть мощность потерь на нагревание проводов обмотки ротора Рпр2. Следовательно, Рмех = Р1 – Рпр1 – Рс – Рпр2. Полезная мощность Р2 на валу двигателя будет меньше механической мощности Рмех из-за механических потерь Рм.п в двигателе, т.е. Р2 = Рмех – Рм.п. Отношение полезной механической мощности Р2 на валу двигателя к активной мощности Р1 потребляемая эл. энергия из сети определяет кпд АД. Кпд = Р2 / Р1. Кпд АД при номинальном режиме работы составляет 0,8 – 0,95.

35. Генераторный, двигательный и тормозной режим ад.
Режимы работы трехфазной АД определяется электромагнитным взаимодействием токов в обмотке статора и ротора. Если частота вращения поля n1, а частота вращения ротора n, то режим работы асинхронной машины можно характеризовать скольжением. S = (n1 – n)/n1. В зависимости от скольжения АМ может работать в 3 режимах двигателя, генератора и электромагнитного тормоза. Режим двигателя (0 < S < 1) машина преобразует электрическую энергию в механическую. Ротор двигателя должен вращаться асинхронно медленней поля, с такой частотой, при которой токи в обмотке ротора, взаимодействуя с вращающим магнитным полем, создаваемым токами в обмотках статора, создают вращающий момент, уравновешивающий тормозной момент от сил трения и нагрузки на валу. Режим генератора ( S < 0 ) трехфазная АМ преобразует механическую энергию в электрическую. Ротор генератора вращается в направлении вращения магнитного поля, создаваемого токами в обмотках статора, с частотой большей, чем частота вращения поля. Режим электромагнитного тормоза ( S > 1 ) ротор трехфазной АМ вращается в направлении, противоположном направлению вращения магнитного поля, создаваемого токами в обмотки статора. При этом в машине рассеивается значительная энергия в магнитопроводе из-за гистерезиса и вихревых токов и обмотках.

36. Регулирование частоты вращения ад.
Поскольку скорость вращения двигателя определяется выражением
![]() ,
,
то регулирование скорости вращения можно осуществлять тремя способами: изменением числа пар полюсов "р", изменением скольжения S и изменением частоты питающей сети f1. Первый из указанных способов дает ступенчатое регулирование скорости и предусматривает размещение на статоре обмотки, схема которой позволяет путем переключений изменять число пар полюсов. В настоящее время известны двигатели с обмоткой, образующей 4 пары полюсов и позволяющей путем переключений получить 4 синхронных скорости вращения.
Регулирование скорости изменением скольжения возможно двумя способами: изменением напряжения питания и изменением активного сопротивления цепи ротора.
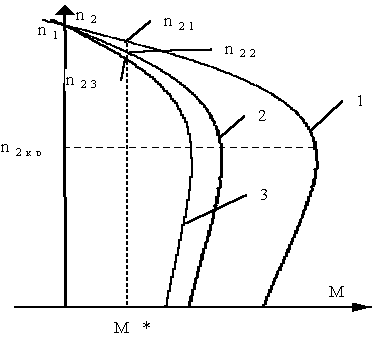
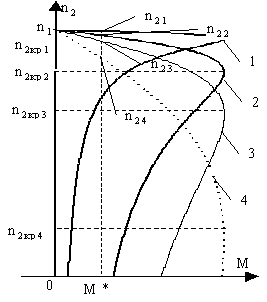
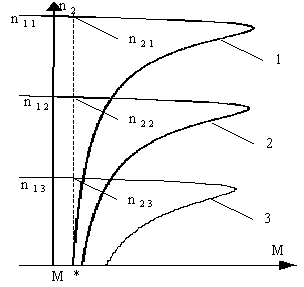
1. Синхронная скорость вращения при постоянной частоте питающей сети остается неизменной, а электромагнитный момент двигателя пропорционален квадрату фазного напряжения. При неизменном (отличном от нуля) моменте нагрузки уменьшение напряжения вызывает уменьшение скорости. Недостаток этого способа – узкий диапазон регулирования скорости, что связано с сужением зоны устойчивой работы двигателя, ограниченной критическим скольжением. Увеличение напряжения вызывает чрезмерный нагрев двигателя, связанных с ростом электрических и магнитных потерь. 2. Здесь с ростом Rдоб в фазе ротора при постоянном моменте нагрузки на валу (отличном от нуля) уменьшается скорость n1>n2>n3. Здесь диапазон регулирования получается достаточно широким, однако с ростом Rдоб растут и электрические потери ротора, что снижает КПД установки в целом. 3. Частотный способ регулирования скорости основан на изменении скорости вращения магнитного поля статора (синхронной скорости)n1=60f1/p, но требует источника питания с регулируемой частотой в виде электромашинного или полупроводникового статического преобразователя напряжения. Развитие силовой полупроводниковой техники сделало этот способ регулирования скорости наиболее перспективным из всех указанных, поскольку он позволяет получить широкий диапазон регулирования (до 100) при высоком КПД. Необходимо отметить, что с изменением синхронной скорости меняется и максимальный момент двигателя (МЭМмах), поэтому для регулирования скорости при постоянном моменте необходимо одновременно с частотой f1 изменять и подводимое напряжение U1, так чтобы отношение U1/f1 осталось постоянным.