

3.2.2. Способи управління покроковими двигунами
Існує декілька способі управління фазами покрокового двигуна.
Перший спосіб полягає в почерговій комутації фаз, при цьому вони
не перекриваються, в один момент часу ввімкнена тільки одна фаза (рис.5а). Цей спосіб називають – повно кроковий режим з ввімкненням одної фази (”one phase on” full step, або wave drive mode). Точки рівноваги ротора для кожного кроку співпадають з положеннями ротора знеструмленого двигуна. Недоліком цього способу є те, що для біполярного двигуна в один і той же момент використовується половина обмоток, а в уніполярного чверть, а це означає, що в цьому режимі не може бути отриманий максимальний момент.
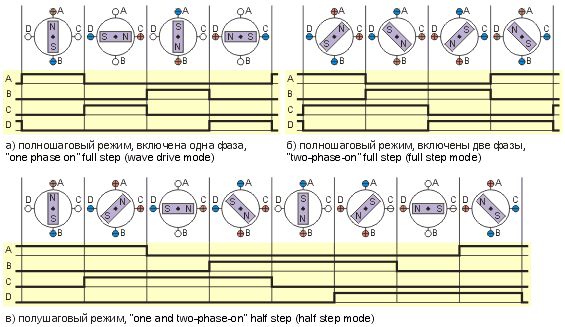
Рис. 5. Способи управління покроковими двигунами
7
Другий спосіб – управління фазами з перекриттям, тобто дві фази ввімкнені в один і той же час. Цей спосіб називають повно кроковий режи з двома ввімкненими фазами (”two-phase-on” full step, або просто full step mode). При цьому способі управління ротор фіксується в проміжних точках між полюсами статора (рис.5б), що забезпечує приблизно на 40% більший момент ніж при ввімкненні одної фази. Цей спосіб забезпечує такий же крок як і попередній, але положення точок рівноваги ротора зміщено на півкроку.
Третій спосіб є комбінацією двох попередніх і називається
півкроковим режимом (”one and two-phase-on” half step, або просто half step mode). При цьому двигун робить крок, що дорівнює половині основного кроку. Цей метод управління часто використовується, так як він дозволяє отримувати більшу роздільну здатність для звичайних двигунів. Кожен другий крок заживлена лише одна фаза, в інших випадках заживлені дві фази (рис. 5в). Крім зменшення розміру кроку, цей спосіб дозволяє частково позбутися явища резонансу. Півкроковий режим зазвичай не може забезпечити максимальний момент. В порівнянні з повнокроковим режимом, півкроковий режим має наступні переваги:
- більш висока роздільна здатність без використання більш дорогих двигунів;
- менші проблеми з явищем резонансу (резонанс приводить лише до часткової втрати моменту, що зазвичай не заважає нормальній
роботі приводу).
Недоліком півкрокового режиму є доволі значні коливання моменту від кроку до кроку. В тих положеннях ротора, коли заживлена одна фаза, момент складає приблизно 70% від повного, коли заживлені дві фази. Ці коливання можуть стати причиною підвищених вібрацій і шумів, хоча все-одно менші ніж в повно кроковому режимі.
Четвертий спосіб управління називається мікрокороковим
режимом (micro stepping mode). При цьому способі управління струм в фазах необхідно змінювати невеликими кроками, забезпечуючи таким чином подріблення половинного кроку на ще менші мікрокороки. Коли одночасно ввімкнені дві фази, але їх струми не рівні, то положення рівноваги ротора буде розміщуватися не в середині кроку, а в місці що визначається співвідношенням струмів фаз. Змінюючи це співвідношення можна забезпечити деяку кількість мікрокроків всередині одного кроку. Проте реалізація мікрокрокового режиму потребує досить складних драйверів, що дозволяють змінювати струм в фазах з необхідною дискретністю. В результаті вібрації та шуми
8
значно мені аж до нульової частоти. Існує багато різних мікрокрокових режимів з величиною кроку від 1/3 повного кроку до 1/32 і навіть менше. По суті, покроковий двигун є синхронним двофазним електродвигуном. Тобто, теоретично, покроковий двигун може працювати в режимі неперервного обертання. Для цього струми його фаз повинні бути синусоїдальні і зсунуті на 90°.
Результатом використання мікрокрокового режиму є набагато більш плавне обертання ротора на низьких частотах. Тому часто мікро кроковий режим використовують тільки для розгону і гальмування, а основний час працюють в пів-, або повно кроковому режимі. В багатьх задачах де необхідні малі переміщення і висока роздільне здатність, мікро кроковий режим часто замінює механічний редуктор.
При здійсненні кожного кроку ротор не зразу зупиняється в новому положенні, а здійснює затухаючі коливання біля положення рівноваги. Час затухання залежить від характеристик навантаження. Часто такі коливання є небажані. Усунути це явище може використання мікрокрокового режиму. На рис.6 показані переміщення ротора в повнокроковому і мікрокроковому режимах, а також залежність моменту покрокового двигуна від швидкості обертання.
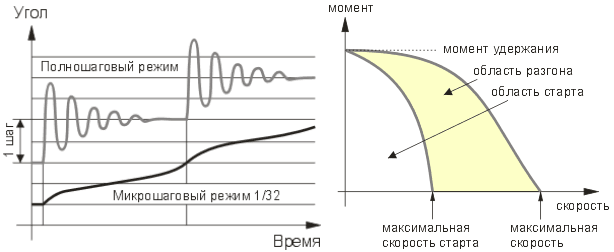
Рис. 6. Переміщення ротора в повнокроковому та мікрокроковому
режимах (а), залежність моменту від швидкості (б).
Покроковим двигунам властиве негативне явище резонансу – раптове падіння моменту при співпадінні частоти кроків та власної резонансної частоти двигуна. Резонансна частота визначається моментом інерції власне ротора двигуна плюс момент інерції навантаження. Тому резонансна частота ротора ненавантаженого
9
PDF
created
with
pdfFactory
Pro
trial
version
www.pdffactory.com