

Билет 1. Области применения систем видеослежения.
2. Операции размыкания и замыкания.
1. Области применения систем видеослежения
Последние 20 лет особое внимание уделяется задачам, связанным с обработкой, представлением информации в форме изображений. Сферы применения: обработка космических изображений (т.е. сейчас существует много спутников, на которых имеются соответствующие системы, которые позволяют получать изображения из космоса – изображения Земли). Эти изображения могут формироваться в видимом диапазоне – с помощью тепловизорных систем, которые дают изображение в инфракрасном диапазоне; и радиолокаторе, дающем изображение в радиодиапазоне.
Существуют центры приема спутниковой информации, где происходит обработка изображений. Эти изображения используются для анализа облачности (прогноз погоды).
Существуют спутники другого рода, которые связаны с военной деятельностью – обнаружением объектов. Используются в биомедицинских исследованиях, с помощью электронных микросхем (обраб. изображений) возможен подсчет каких-либо образований в крови. Широко используются в производстве: можно подсчитать количество изделий, следить за исправностью, управлять технологическим оборудованием, идентифицировать лица. Применяются также в охранных системах, когда идет анализ изображений, получаемых с камер, с целью обнаружения движения. Контроль движения транспорта, обнаружение гос. номеров автомобилей. Для обработки и передачи изображений по каналам связи – необходимо проводить эффективное сжатие с целью передачи, а затем восстановление. Спец. применение, связанное с военной областью – распознавание объектов, обнаружение и слежение, а также, после этого, высокоточное наведение оружия.
Функциональная схема системы видеослежения.

Платформа управляется приводами, по двум осям. ЭВМ-блок обрабатывает эти изображения с целью определить положение какого-либо объекта на изображении. В замкнутой системе ошибка определяется с помощью обработки изображений. Современные приборы позволяют давать разрешение 1000*1000 (1000000 млн. элементов - пикселей), т.е. 1 кадр=1000000пикселей. Современное телевидение дает 25 кадров/с = 25 Мбайт потока. В системе управления 25 раз/с обрабатывается изображение (период дескритизации=25 Гц). Поэтому для решения задач в реальном масштабе времени требуется высокая производительность, которая может достигать млрд операций в секунду.
2. Операции размыкания и замыкания






Билет 1. Детерминированное описание непрерывных изображений.
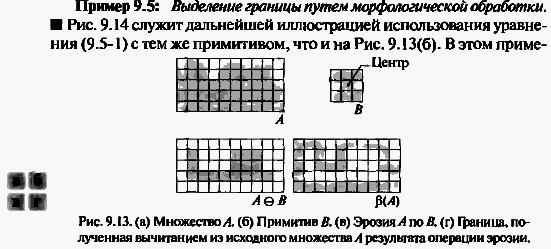
2. Морфологическая операция выделения границ.
1. Детерминированное описание непрерывных изображений.
Распределение энергии источника светового излучения по пространственным координатам x, y, времени tи длинам волн λ описывается функцией С(x, y,t ,λ), причем 0 С(x, y,t ,λ)A.
Размеры изображения ограничены формирующей системой и средой, на которую оно записывается, т.е. -LxxLx, -LyyLy, -TtT.
Ощущение светлоты, возникающее в зрительной системе человека, обычно определяется мгновенной яркостью светового поля
![]()
где Vs(λ) – спектральная чувствительность человеческого зрения.
Сформулированные изображения можно описывать функцией F(x, y, t) – по пространству и по времени. Чем больше яркость, тем больше значение функции F(x, y) – по пространству. Таким образом, имеем дело с двумерными и трехмерными сигналами.
При анализе таких сигналов рассматриваются двумерные системы, в которых производят дискретизацию непрерывных функций. Для иллюстрации дискретизации используется двумерная δ – функция.
Двумерная дельта-функция Дирака есть сингулярный оператор, обладающий следующими свойствами:

Двумерная система называется линейной, если для нее справедлив принцип суперпозиции:
![]()
где Q– линейный оператор; a1 и a2 – постоянные коэффициенты.
На основе линейных операторов строятся многие алгоритмы обработки изображения.
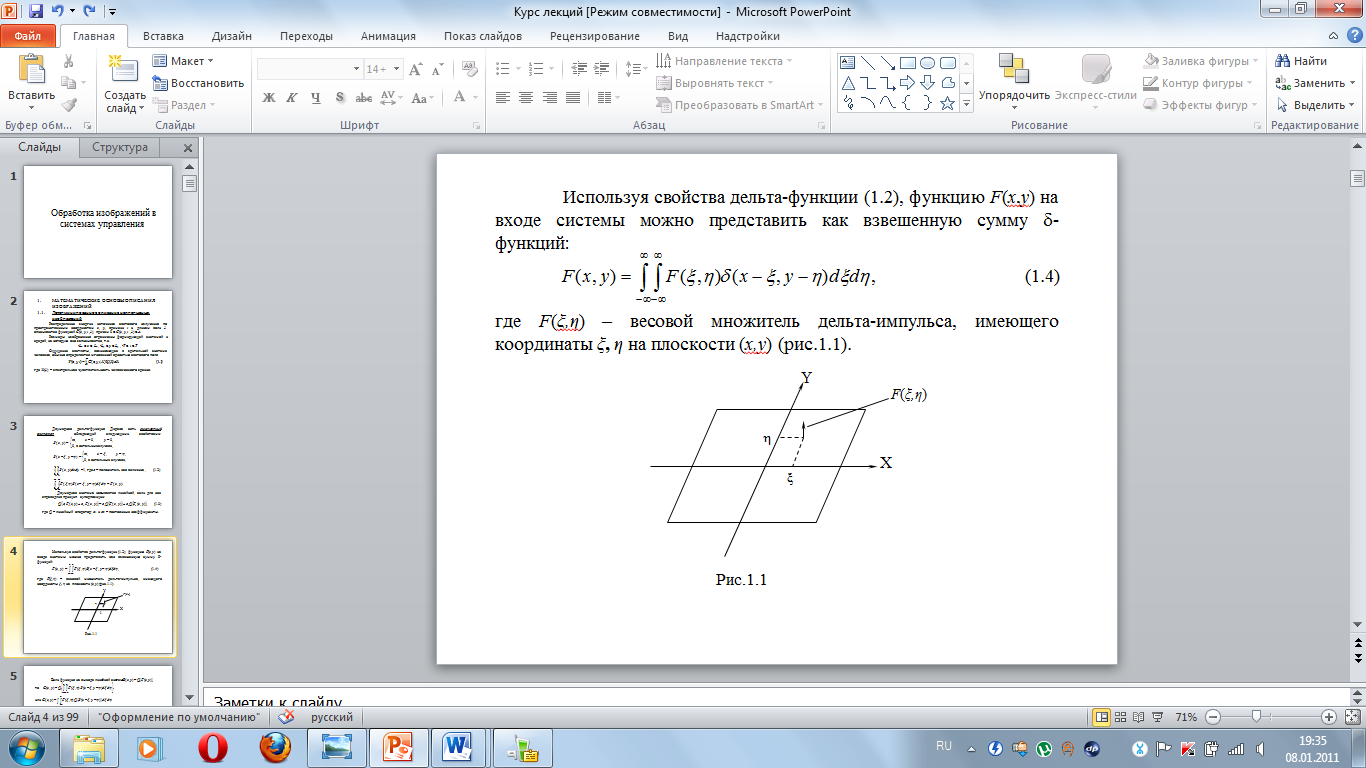
Используя свойства дельта-функции (1.2), функцию F(x,y) на входе системы можно представить как взвешенную сумму δ-функций:
![]()
где F(ξ,η) – весовой множитель дельта-импульса, имеющего координаты ξ, ηна плоскости(х,у) (рис.1.1).
![]()
Если функция на выходе линейной системы

![]()

Наряду с линейными операторами при обработке изображений широко используются дифференциальные операторы. Они часто используются для определения перепадов яркости изображений, для обнаружения контуров.
Первые производные по пространственным координатам x и y определяются как
![]() =дF(x,y)/дx,
=дF(x,y)/дx,![]() =дF(x,y)/дy.
=дF(x,y)/дy.
Производная по направлению Z, составляющему угол φ с горизонтальной осью:
![]()
Сумма вторых производных дает Лапласиан – скаляр, не зависящий от направления:
![]()
Двумерное преобразование Фурье используется для оценки спектра изображения и определяется как:

Из преобразования Фурье можно получить амплитудный и фазовый спектры. Первый отображает распределение общей энергии по отдельным пространствам, а второй отображает фазовый сдвиг.
Обратное преобразование Фурье:
![]()
Само преобразование может быть выполнено в два этапа:
![]()
а затем
![]()
Свертка во временной области эквивалентна перемножению в частотной области:

Двумерное преобразование Фурье требует больших вычислений, поэтому используют быстрое преобразование Фурье (БПФ).
Свойства преобразования Фурье:
![]()
Изменение масштаба пространственных переменных приводит к обратному изменению масштаба пространственных частот и пропорциональному изменению значений спектра:
![]()
Изменение координат на исходной плоскости приводит к фазовым изменениям на частотной плоскости:
![]()
Вращение или поворот изображения соответствует и повороту амплитудного спектра.
2. Морфологическая операция выделения границ.


Билет 1. Вероятностное описание непрерывных изображений.
2. Морфологическая операция заполнения области.