Вопрос 4. Структура блока предвар обработки.Назначение и работа его узлов
На рис. 2.4 приведена структурная схема БЗУ, для накопления информации о целом кадре изображения.
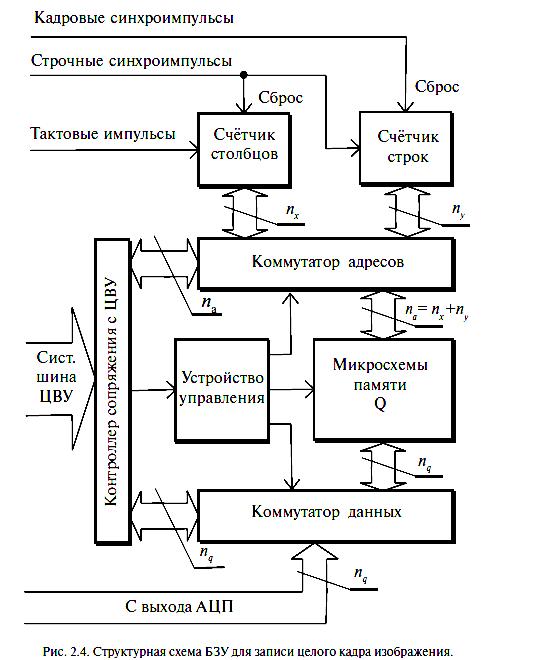
В режиме накопления данных входной сигнал в виде последовательности двоичных кодов (с разрядностью nq) поступает с выхода АЦП на коммутатор данных, а через него на вход данных микросхем памяти. Адреса ячеек памяти, в которые осуществляется запись, формируются двоичными счётчиками столбцов и строк, на входы которых от синхрогенератора телевизионного датчика подаются соответственно тактовые импульсы опроса элементов, и строчные синхроимпульсы. Кроме того, строчные синхроимпульсы используются в качестве сигнала сброса, обнуляющего счетчик столбцов после завершения опроса элементов данной строки. В качестве сигнала сброса счётчика строк используются кадровые синхроимпульсы, также поступающие в БЗУ от синхрогенератора телевизионного датчика. Таким образом, на выходах счётчиков в каждый момент времени присутствуют двоичные коды номера элемента в строке (то есть код номера столбца с разрядностью n1) и номера строки (с разрядностью n2). Каждая пара кодов (с суммарной разрядностью n1 + n2) образует двоичный адрес ячейки памяти, в которую заносится текущее значение сигнала. Через коммутатор адресов такой адрес, сформированный счётчиками, поступает на адресные входы микросхем памяти.
При передаче накопленных данных в ЦВУ с помощью устройства управления осуществляется перевод микросхем памяти из режима записи в режим считывания. Одновременно устройство управления переключает коммутаторы данных и адресов таким образом, что входы данных и адресов микросхем памяти оказываются соединенными с контроллером, обеспечивающим сопряжение БЗУ с ЦВУ. В режиме передачи данных адреса ячеек памяти, из которых осуществляется считывание информации, формируются уже не счетчиками, а подпрограммой обмена, хранящейся в ЦВУ. Адреса двоичных кодов чисел, хранящихся в ячейках памяти, однозначно связаны с координатами соответствующих им элементов изображения.
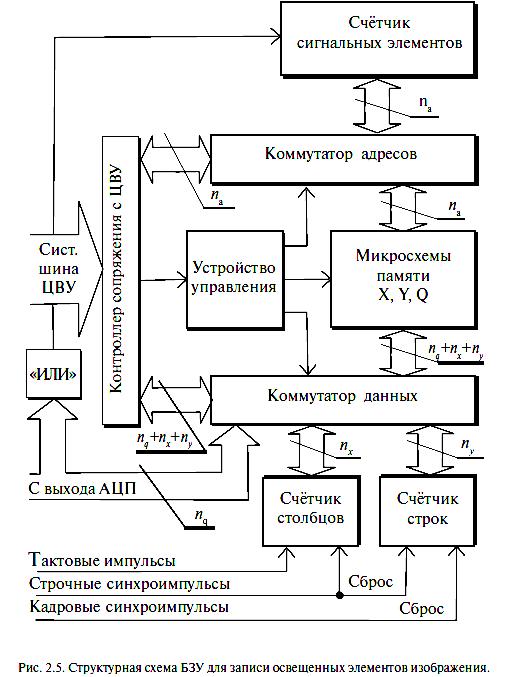
На рис. 2.5 показан другой вариант построения БЗУ, в котором накапливается информация лишь о тех элементах анализируемого изображения, видеосигнал с которых превышающий установленный порог (уровень фона).
При наблюдении, например, за малоразмерными или точечными объектами, когда имеет место значительная избыточность «пустых» элементов в кадре, этот вариант может быть предпочтителен с точки зрения существенного сокращения объема и времени обработки данных.
Поскольку в данном случае осуществляется запись не полного кадра, а лишь его отдельных фрагментов, содержащих полезную информацию, то помимо двоичных кодов видеоимпульсов в БЗУ необходимо записывать и двоичные коды координат соответствующих элементов. В противном случае при обработке данных в ЦВУ невозможно было бы восстановить изображения и координаты наблюдаемых объектов. Поэтому в режиме накопления на вход микросхем памяти через коммутатор данных подаются для записи не только двоичные коды сигналов с выхода АЦП, но также двоичные коды номеров строк и столбцов с выходов счётчиков. Таким образом, суммарная разрядность записываемых данных равна nq + nx + ny.
Через соответствующий коммутатор на адресные входы микросхем памяти поступают двоичные коды, формируемые счётчиком сигнальных элементов. Этот счетчик изменяет своё состояние каждый раз, когда значение двоичного кода на выходе АЦП отлично от нуля. При соответствующей настройке ФУ (см. раздел 2.2), логическая схема «ИЛИ» выполняет функцию своеобразного индикатора сигнала, превышающего установленный порог.
Считывание накопленной информации и передача данных в ЦВУ осуществляется также, как и в БЗУ, рассмотренном выше (рис. 2.4).
В состав контроллера сопряжения может
входить также специальный триггер,
используемый для сигнализации о состоянии
готовности БЗУ к передаче данных после
завершения полного цикла накопления
информации об изображении.