

Линейная зависимость и независимость системы векторов (линейная комбинация)
Набор векторов a1 a2 … an называется системой векторов.

Система векторов {ai}, i=1,n называется линейно-зависимой, если в случае, когда линейная комбинация равно 0, найдется хотя бы один коэффициент αi отличный от 0. И в этом случае можно выразить один вектор через другой.
Система называется линейно-независимой, если в случае приравнивания линейной комбинации к 0 все αi = 0.
На плоскости любые два неколлинеарных вектора и любые три некомпланарных на плоскости будут линейно-независимыми. Число линейно-независимых векторов в пространстве не может превышать размерности этого пространства.
Базис
Базис (др. греч. βασις, основа) — множество таких векторов в векторном пространстве, что любой вектор этого пространства может быть единственным образом представлен в виде линейной комбинации векторов из этого множества - базисных векторов.
Базисом на плоскости являются любые два неколлинеарных вектора, в трехмерном геометрическом пространстве – любые 3 некомпланарных, в любом пространстве – являются линейно-независимые вектора, число которых определяется размерностью пространства.
Теоремы о единственности разложения любого вектора пространства (r2, r3)
Базисов можно выбрать бесконечно много в любом пространстве, но если конкретный базис выбран R3 {l1, l2, l3}, то любой вектор можно разложить по этому базису.
![]() x
= x1l1
+ x2l2
+ x3l3
x
= x1l1
+ x2l2
+ x3l3
Коэффициенты разложения называются координатами вектора. Разложение вектора по базису всегда единственное.
![]()
![]()
Вычтем:
![]() - линейная комбинация линейно-независимых
векторов
- линейная комбинация линейно-независимых
векторов
x1-y1=0
x2-y2=0
x3-y3=0
Следовательно, вектор имеет одни координаты, что говорит о единственности разложения вектора.
Алгоритм нахождения базиса системы векторов
Для того чтобы найти базис системы векторов A1 ,A2 ,...,An необходимо:
Составить соответствующую системе векторов однородную систему уравнений A1x1+A2x2+...+Anxn =Θ
Привести эту систему
Координаты, проекция вектора на ось
В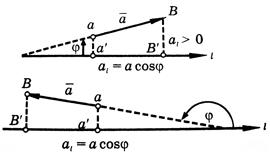 сякий
геометрический вектор a
может быть единственным образом
представлен в виде:
сякий
геометрический вектор a
может быть единственным образом
представлен в виде:
a=X1e1+ X2e2 + X3e3, где числа X – координаты вектора a в базисе β= (е1 е2 е3)
П![]()
![]()
![]() роекция
вектора на ось есть скалярная величина,
равная произведению модуля проектируемого
вектора на косинус угла между положительными
направлениями оси и вектора (см. рисунок).
роекция
вектора на ось есть скалярная величина,
равная произведению модуля проектируемого
вектора на косинус угла между положительными
направлениями оси и вектора (см. рисунок).
Базис β= (е1 е2 е3) называется прямоугольным если векторы е попарно перпендикулярны и имеют единичную длину.
К оординаты
x y z
вектора а в прямоугольном базисе
совпадают с проекциями вектора а на
базисные орты i j
k, а длина вектора
равна
оординаты
x y z
вектора а в прямоугольном базисе
совпадают с проекциями вектора а на
базисные орты i j
k, а длина вектора
равна
Числа
![]()
![]()
![]()
Называется направляющими косинусами вектора a< они совпадают с координатами (проекциями) его орта а0=1/|a|*a
Координаты вектора будут проекциями вектора на эти оси.
![]()
![]()
![]()
Декартова система координат
Упорядоченная система трех взаимно-перпендикулярных координатных осей с общим началом и общей единицей длины называется декартовой прямоугольной системой координат.
К оординаты x y z вектора а в прямоугольном базисе совпадают с проекциями вектора а на базисные орты i j k, а длина вектора равна
Числа
Называется направляющими косинусами вектора a< они совпадают с координатами (проекциями) его орта а0=1/|a|*a
Координаты вектора будут проекциями вектора на эти оси.
В трехмерном пространстве введена декартова прямоугольная система координат если заданы:
Некоторая точка О, называемая началом координат
Некоторый прямоугольный базис β= (i, j, k) в множестве вех геометрических векторов.
Оси, проведенные через начало координат в направлении базисных ортов называются координатными осями.