

Принципы автоматического регулирования.
Влияние возмущающих воздействий на регулируемую величину можно компенсировать или регулированием по возмущению или регулированием по отклонению регулируемой величины от ее заданного значения.
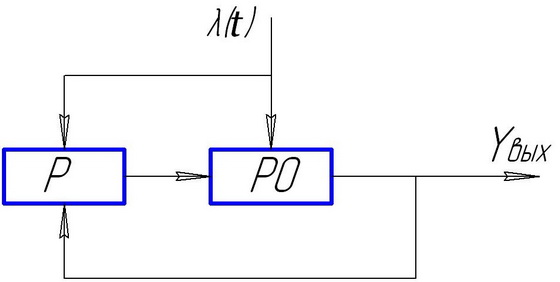
Рис. 1.11Схема реализации принципов автоматического регулирования.
Р- регулятор, РО- объект регулирования.
В первом случае работа АСР основана на контроле возмущающих воздействий. В этих системах воздействие на регулировочные органы ОР осуществляется почти без запаздывания по отношению к моменту возникновения возмущения, т.е. еще до того как успеет существенно измениться значение регулируемой величины. В этом достоинство систем. Недостатком такой системы является то, что флуктуации нагрузки (случайные возмущения) и неизбежные неточности в работе системы регулирования будут вызывать отклонения регулируемой величины, накапливающееся со временем и зачастую выходящее за допустимые пределы.
При работе АСР по отклонению регулируемого параметра почти исключается возможность неоправданного срабатывания регулятора. Недостаток этих АСР в том, что регулирующее воздействие на объект регулирования будет лишь по мере накопления отклонения регулируемой величины и следовательно, будет запаздывать по отношению к событию возмущения. Сочетание достоинств с устранением недостатков этих систем возможно в комбинированной АСР, в которых воздействие на регулятор производится по возмущению (или по нескольким возмущениям) и по отклонению регулируемой величины от заданного значения. Примером такой системы является АСР питания барабанного котла.
Требования к АСР:
1) к запасу устойчивости (при том, что процессы регулирования должны быть сходящиеся);
2) к статической точности (величине допустимой ошибки регулирования в равновестном режиме);
3) к качеству переходного процесса (процессы должны быть не только сходящиеся, но и быстро затухающие);
4) к динамической точности - к величине ошибок (отклонений) в переходном процессе при наличии непрерывно изменяющихся воздействий.
8. Разработка функциональной схемы регулятора.
Принцип работы АСР следующий. Сигналы по расходу пара и питательной воды вводятся в регулятор с противоположными знаками. В установившемся состоянии эти сигналы равны, противоположны по знаку и, следовательно, компенсируют друг друга. Сигнал по уровню воды в парогенераторе компенсируется сигналом задания. При изменении расхода пара мгновенно изменяется соответствующий сигнал на входе в регулятор и последний пропорционально изменяет расход питательной воды, не дожидаясь изменения уровня. В регуляторе используется ПИ-закон регулирования, однако вследствие ввода в регулятор практически безинерционной отрицательной обратной связи по расходу питательной воды в нем реализуется П-закон регулирования (аналогия жесткой обратной связи по положению регулирующего органа). Статическая неравномерность П-регулятора устраняется корректирующим сигналом по расходу пара. Увеличение потребления пара потребителям при неизменной подаче топлива приведёт к уменьшению давления в барабане котла, что вызовет увеличение объёма пароводяной эмульсии, так называемое «набухание».