

Билет № 24
1. Широтно-импульсный способ управления. Наиболее широкое применение из всех видов импульсного регулирования для управления двигателями постоянного тока нашло широтно-импульсное регулирование напряжения (ШИР).
При импульсном способе (рис 2.13) к микродвигателю подводятся импульсы неизменного по амплитуде напряжения управления Uу.ном,в результате чего его работа состоит из чередующихся периодов разгона и торможения. Если эти периоды малы по сравнению с полным временем разгона и остановки ротора, то угловая скорость ротора не успевает к концу каждого периода достигать установившихся значений и установится некоторая средняя угловая скорость ωcp. Значение ωcp при неизменных моменте нагрузки и напряжении возбуждения однозначно определяется относительной продолжительностью импульсов ε:
ε=tи/Tи, (2.22)
где tи- длительность импульса; Ти - период.
С увеличением относительной продолжительности импульсов (рис.2.13, ε'>ε) угловая скорость ротора растет ( ω'cp> ωcp).В период паузы tп ротор обязательно должен тормозиться. Если это условие не будет выполняться, то угловая скорость ротора при любом значении ? будет непрерывно увеличиваться, пока не достигнет значения угловой скорости х.х., так как во время импульса угловая скорость будет возрастать, а во время паузы – оставаться практически неизменной.
С ростом частоты управляющих импульсов амплитуда колебаний скорости уменьшается; среднее значение угловой скорости остается при этом неизменным.
2. Конденсаторное торможение электродвигателей
Конденсаторное торможение асинхронных двигателей малой мощности и комбинированные способы торможения с его использованием в последние годы получили значительное распространение. С точки зрения быстроты остановки, сокращения тормозного пути и повышения точности конденсаторное торможение часто дает лучшие, результаты, чем другие способы торможения электродвигателей.
Конденсаторное торможение основано на использовании явления самовозбуждения асинхронной машины, или, что более правильно, емкостного возбуждения асинхронной машины, поскольку необходимая для возбуждения генераторного режима реактивная энергия доставляется подключенными к статорной обмотке конденсаторами. В этом режиме машина работает с отрицательным по отношению к вращающемуся магнитному полю, созданному возбужденными в статорной обмотке свободными токами, скольжением, развивая на валу тормозной момент. В отличие от динамического и рекуперативного оно не требует потребления возбуждающей энергии из сети.
Билет № 25
1. Регулирование ДПТ изм маг потока
величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока — уменьшается. Практически возможно изменение скорости только в сторону увеличения ввиду насыщения двигателя.
При увеличении скорости ослаблением потока допустимый момент двигателя постоянного тока изменяется по закону гиперболы, а мощность остается постоянной. Диапазон регулирования скорости для данного способа D = 2 - 4.
2. Для управления моментом при динамическом торможении асинхронным двигателем с фазным ротором по программе с заданием времени используются узлы схем, приведенные на рисунке, из которых схема «а» применяется при наличии сети постоянного тока, а схема «б» — при отсутствии ее.
В качестве тормозных резисторов в роторе используются пусковые резисторы R1, включение которых в режиме динамического торможения производится отключением контакторов ускорения, показанных в рассматриваемых узлах схем условно в виде одного контактора КМ3, команда на отключение которого подается блокировочным контактом линейного контактора КМ1.
Схема динамического торможения асинхронного двигателя
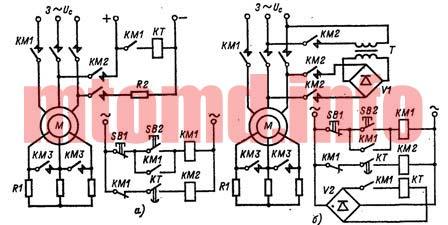 а
– есть сеть постоянного тока; б – нет
сети постоянного тока
а
– есть сеть постоянного тока; б – нет
сети постоянного тока
Эквивалентное значение постоянного тока в обмотке статора при торможении обеспечивается в схеме «а» дополнительным резистором R2, а в схеме «б» соответствующим выбором коэффициента трансформации трансформатора Т.
Контактор торможения КМ2 может быть выбран как на постоянном, так и на переменном токе в зависимости от требуемого числа включений в час и использования пусковой аппаратуры.
Приведенные на рисунке схемы управления могут использоваться для управления режимом динамического торможения асинхронного двигателя с короткозамкнутым ротором. Для этого обычно используется схема с трансформатором и выпрямителем, приведенная на схеме «б».