

2.3.3.Объекты чистого запаздывания
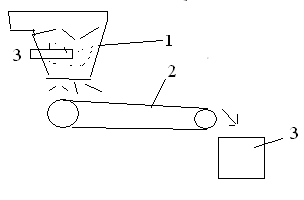
Пример: конвер, перемещающий сыпучий материал из бункера в аппарат.
-
бункер с материалом, 2-конвеер, 3- аппарат, З-заслонка
Количество
материала изменяется за счетположения
заслонки (шибер), обозначим
![]() -отношение
изменения регулирующего воздействия
на приходе объекта,
-отношение
изменения регулирующего воздействия
на приходе объекта,
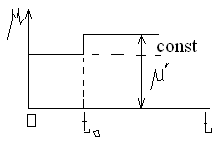
В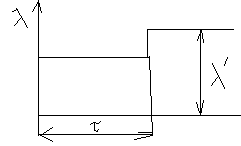 момент времени t0
увеличиваем степень открытия заслонки,
увеличится количества материала,
момент времени t0
увеличиваем степень открытия заслонки,
увеличится количества материала,![]() увеличится.
При изменении
увеличится.
При изменении
![]() на входе изменение на выходе сравняется
через время
на входе изменение на выходе сравняется
через время
![]() ,
т.к. материал на конвейере.
,
т.к. материал на конвейере.
Динамические
характеристики
![]() ,
где
,
где
![]() -время
чистого запаздывания, оно равно времени
перемещения материала из бункера в
аппарат.
-время
чистого запаздывания, оно равно времени
перемещения материала из бункера в
аппарат.
2.3.4. Сложные регулируемые обьекты.
Дан. обьекты хар-ся наличием 2-х емкостей с соответств. постоянными временями t1(первой емкости) и t2 (2-й)обьекта. Эти емкости разделены сопротевлением и в переходном процессе представляют обмен матер. И тепловой энергии м/д этими емкостями. Пример дан. обьекта кожухотрубчатый теплообменник, 1-яемкость греющая среда, стенка,а 2-я стенка нагревающая срада. Динамическая характеристика дан. обьекта
![]()
К дан. обьектам свойственно наличие времени запаздывания числа r т.е. 𝜑 изменяется не сразу при изменении 𝜇, а ч/знекоторое время τ. Решение дан. уравнения зав. От t1 и t2. Если
![]()
𝜑=![]() )
)
П 𝜑 T
𝜇 t t τ1
Kоб. 𝜇 A τn τ













τn- время переходного запаздывания. Полное время запаздывания
τ1=τ+τn
Т-эквивалентная постоянная времени 2-х емкостного статического обьекта.
Пример теплообменник труба в трубе.
2.4., 2.4.1.Автоматические регуляторы.
В АСР непрерывно измеряется значение регулируемой величины, а воздействие регулятора на объект регулирования может быть различным в зависимости от характера воздействия АР делятся на АР: прерывистого действия и непрерывного действия.
Регуляторы прерывного действия делятся: импульсные, релейные, позиционные.
2.4.2 Регуляторы прерывистого действия (релейные , позиционные)
По характеру воздействия АР делятся на импульсные, релейные позиционные
а) Импульсные шаговые регуляторы. Диаграмма приведена на рисунках рисунках:
𝜇 𝜇 t 𝜑
2)
3)












t





















t








С целью устранения
![]() регулятор действует на объект импульсами
через равные промежутки времени а их
амплитуда пропорциональна
регулятор действует на объект импульсами
через равные промежутки времени а их
амплитуда пропорциональна ![]() (рис 2). На рис.3 амплитуда одинакова ,по
продолжительности различна. Данные
регуляторы применяются на объектах
подверженных частым но не сильным
возмущениям.
(рис 2). На рис.3 амплитуда одинакова ,по
продолжительности различна. Данные
регуляторы применяются на объектах
подверженных частым но не сильным
возмущениям.
б) Релейные регуляторы (РР).
Диаграмма работы РР с зоной нечувствительности - +ε -ε приведена на рисунке 4
𝜇 𝜇 𝜑
2)
3)
+ε 𝜟𝜑
2
1




t
t
-ε
3
4








В пределах зоны
чувствительности регулятор не
воспринимает изменение ![]() .
При превышении
.
При превышении ![]() (±ε) зоны чувствительности, регулятор
срабатывает, при уменьшении
(±ε) зоны чувствительности, регулятор
срабатывает, при уменьшении ![]() меньше чем (±ε) регулятор выключается.
меньше чем (±ε) регулятор выключается.
в) Позиционные регуляторы (ПР)
Это разновидность
релейных регуляторов, но в отличии от
них имеют два устойчивых положения,
при отклонении ![]() выше верхнего предела регулирования
+δ, и второе, когда
выше верхнего предела регулирования
+δ, и второе, когда ![]() меньше нижнего предела регулирования
–δ.
меньше нижнего предела регулирования
–δ.
𝜇 𝜇 𝜑
2)
3)
+δ 𝜟𝜑
2
1




t
t
-ε
3
4
-δ







В данном случае воздействие на объект является полным. Позиционные регуляторы просты по конструкции используются для регулирования статических объектов подверженных небольшим возмущениям. В АСР используются быстродействующие исполнительные механизмы. Данные регуляторы поддерживают не заданное значение, ас некоторой погрешностью (электромагниты