

«САНКТ-ПЕТЕРБУРГСКИЙ
ГОСУДАРСТВЕННЫЙ
ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра «Теория механизмов и машин»
Пресс чеканочный.
Курсовая работа
Студент группы: 3066/2
Никулин Василий
Проверил:
Терешин В.А.
Санкт-Петербург
2011
Содержание:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-
Техническое задание
Цель: рассчитать скорости и ускорения отдельных звеньев, сделать силовой расчет, показать это графически.

Рисунок 1.1 – Схема механизма
Дано: OA=0,1 м
AB=0,35 м
LB=0,24 м
OL=0,32 м;
LD=0.4 м
CK=0.3 м
a=0,28 м
ω=6 c -1
DП=0.2 м
Р=6 Атм
-
Структурный анализ механизма
Исследуемый
механизм, кинематическая схема, которого
приведена на рисунке: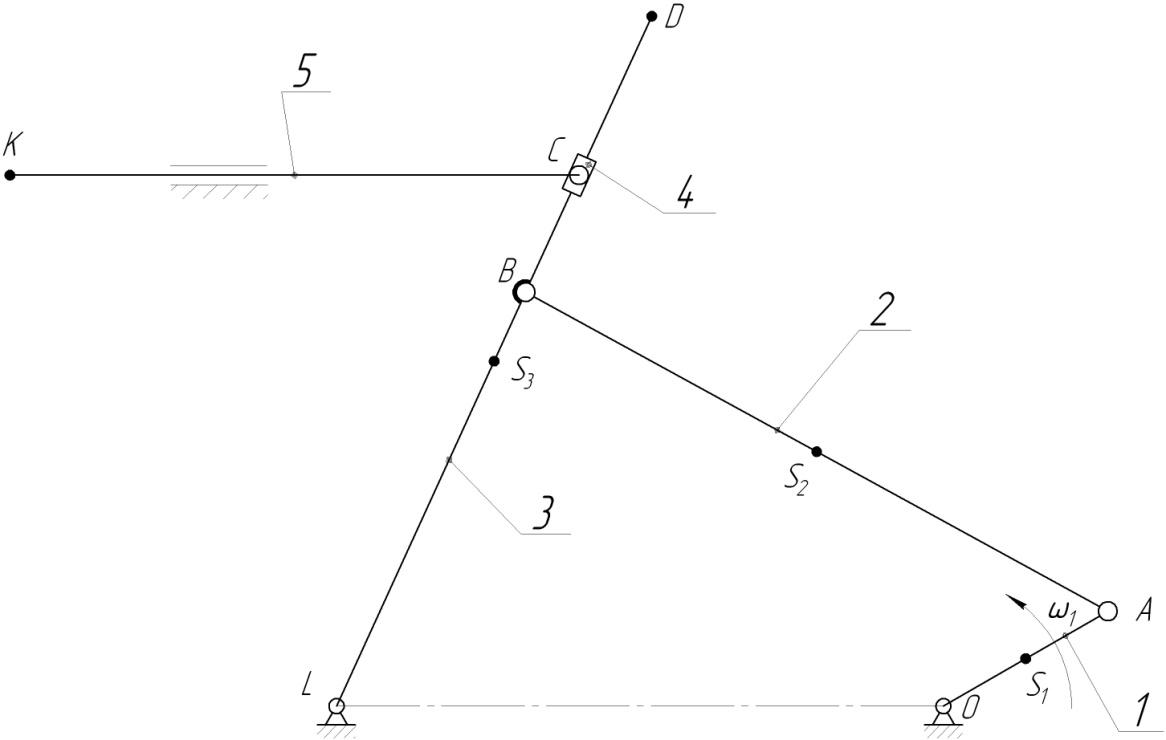
Рисунок 2. 1 – Кинематическая схема механизма
Определяем степень подвижности механизма по формуле:
 ,
,
где, р – число кинематических пар;
n – число подвижных звеньев

Так как W=1 , то у механизма одно входное звено.
0-стойка;
1-кривошип;
2-шатун;
3-кулиса;
4-камень кулисы;
5-ползун.
О(0-1)-вращающаяся кинематическая пара;
А(1-2) - вращающаяся кинематическая пара;
B(2-3) - вращающаяся кинематическая пара;
L(3-0) - вращающаяся кинематическая пара;
C3(3-4) - вращающаяся кинематическая пара;
C5(5-4) - поступательная кинематическая пара.
Механизм образован присоединением к неподвижной оси 0 кривошипа, который образует с ним вращательную пару (т.О). Кривошип 1 совершает вращательное движение вокруг неподвижной оси. Шатун 2 совершает сложное плоскопараллельное движение и присоединен к кривошипу 1(т.А).
Кулиса 3 присоединена к шатуну 2, образуя с ним вращательную КП (т.В). Кулиса 3 осуществляет неполное вращательное движение вокруг неподвижной оси. К кулисе 3 присоединяется камень кулисы 4, образовывая вращательную КП (т.С). Камень кулисы 4 присоединен к ползуну 5 и к кулисе 3. Ползун 5 осуществляет поступательное движение вдоль направляющей, образуя с ней поступательную кинематическую пару (т.К).
Разбиваем
механизм на группы Асура: 
Рисунок 2.2 – Структурная группа 4-5


Рисунок 2.3 – Структурная группа 2-3
W=3n-2p=3*2-2*3=0

Рисунок 2.4 Начальный механизм.
W=3n-2p=3*1-2*1=1

Рисунок 2.5 Структурные группы и граф механизма.
-
Построение плана положений механизма

4) Кинематический анализ.
4.1) Аналитический расчет скоростей и ускорений
Для определения скоростей и ускорений аналитическим способом воспользуемся методом замкнутых векторных контуров.
Рассмотрим первый векторный контур (рисунок 2.5).

Рисунок 4.1. – Первый векторный контур
Рассмотрим векторний контур ОАBL. Запишем условия замкнутости контура:
 (1)
(1)
Уравнение (1) проектируем на оси координат :
 (2)
(2)
Система (2) есть системой с неизвестными углами φ2 и φ3. Для решения системы контур ОАBL разбиваем на два ОАL и АBL.
Рассмотрим контур ОАL и запишем условия замкнутости контура:
 (3)
(3)
Уравнения (3) проектируем на оси координат:

 (4)
(4)
Из
системы (4) находим
 и
и

Рассмотрим контур АBL и определим углы φs3 и φs3 по теореме косинусов.
Теперь мы можем определить углы φ2 и φ3.
Для определения аналогов угловых скоростей ω2 и ω3 звеньев 2 и 3 дифференцируем уравнения (2) по обобщенной координате φ1
 (5)
(5)
Имея
ввиду, что
 есть аналог угловой скорости ω2
звена 2 и
есть аналог угловой скорости ω2
звена 2 и
 есть аналог угловой скорости ω3
звена 3 получаем
есть аналог угловой скорости ω3
звена 3 получаем
 (6)
(6)
Из углов, входящих в первое уравнение (6), вычитаем общий угол φ2, что соответствует повороту осей координат xAy на общий угол φ2. Имеем

откуда получаем выражения для аналога u31 и угловой скорости ω3
После аналогичного преобразования того же уравнения поворотом осей координат на угол φ3 получаем выражение для аналога u21 и угловой скорости ω2
Для определения угловых ускорений ε2 и ε3 звеньев 2 и 3 дифференцируем по обобщенной координате φ1 уравнение (6) что приводит к уравнению
 (7)
(7)
где,
 и
и
 - аналоги угловых ускорений. Величины
аналогов можно определить, если выполнить
преобразования координат последовательным
поворотом осей координат на углы φ2
и φ3.
Имеем
- аналоги угловых ускорений. Величины
аналогов можно определить, если выполнить
преобразования координат последовательным
поворотом осей координат на углы φ2
и φ3.
Имеем
Таким образом, находим истинные угловые скорости и ускорения звеньев 2 и 3 равны
Рассмотрим второй векторный контур (рисунок 4.2)

Рисунок 4.2 – Второй векторный контур
Запишем векторное уравнение контура
 (8)
(8)
Уравнение (8) проектируем на оси координат
 (9)
(9)
Из
системы (9) находим


Для определения аналогов скоростей и ускорений систему (9) продифференцируем по обобщенной координате φ1
 (10)
(10)
Для определения аналога ускорений уравнения (10) продифференцируем по обобщенной координате φ1

Таким образом, находим истинные скорости и ускорения звеньев 3 4 5