

Геометрический (аналитический) метод
|
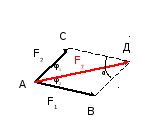
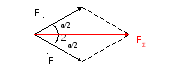
Из ΔАВД по теореме косинусов:
Так как β=1800- α, то cos β = - cos α.
Углы φ1 и φ2 определяют по теореме синусов
|
|
В зависимости от значения угла α возникло 4 частных случая:
|
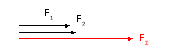
1.
Силы действуют вдоль одной прямой в
одну сторону.
|
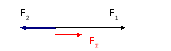
3.
Силы действуют вдоль одной прямой в
разные стороны.
|
|
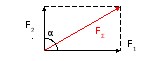
4. Силы действуют под углом друг к другу; F1= F2= F.
|
Сложение плоской системы сходящихся сил. Силовой многоугольник
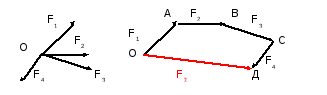
ОАВСД – силовой многоугольник, замыкающая сторона ОД является равнодействующей силой. Она направлена из начала первого вектора в конец последнего.
Геометрическое условие равновесия плоской системы сходящихся сил
Для того, чтобы плоская система сходящихся сил находилась в равновесии, необходимо, чтобы силовой многоугольник был замкнут (начало первого вектора совпадало с концом последнего, т.е. равнодействующая равна 0).
![]()
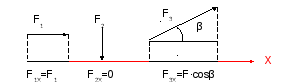
Проекция силы на ось
Осью называют неограниченную прямую, которой в пространстве приписано определённое направление.
Проекция силы на ось –отрезок оси, заключённый между перпендикулярами, опущенными из начала и конца вектора (скалярная величина).
Рассмотрим два случая:
|
|

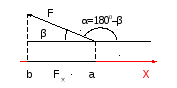
Проекция силы на ось равна произведению модуля силы на косинус угла между направлением действия силы и положительным направлением оси.
![]()
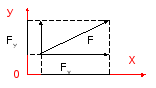
Проекция силы на две взаимно перпендикулярные оси.
|
|
Формула для определения модуля силы через её проекции на оси координат
|
|
|
Пример:
Проекция векторной суммы сил на ось
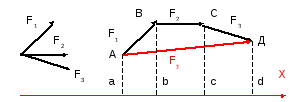
F1X=ab; F2X=bc; F3X=cd
FΣX=ad=ΣFiX
FΣY=ΣFiY
Формула для определения модуля равнодействующей силы через её проекции на оси координат
![]()
Проекция векторной суммы сил на ось равна алгебраической сумме проекций слагаемых сил на ту же ось.
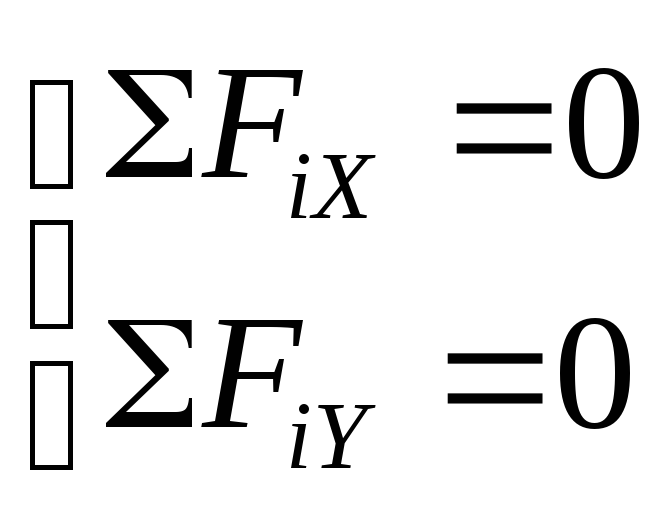
Аналитическое условие равновесия плоской системы сходящихся сил.
![]()
Плоская система сходящихся сил находится в равновесии, когда алгебраические суммы проекций всех сил на две взаимно перпендикулярные оси равны 0.
Уравнения равновесия
2. Пространственная система сходящихся сил
Система сил, линии действия которых расположены в различных плоскостях, называется пространственной.
Параллелепипед сил
Силу F можно представить в виде диагонали прямоугольного параллелепипеда, рёбрами которого являются вектора FХ, FУ, FZ, модули которых равны проекциям силы F на соответствующие оси координат X, Y, Z.
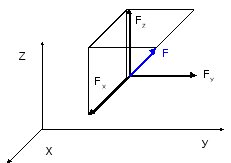
Формула для определения силы через её проекции на оси координат:
![]()
Направляющие косинусы:
![]() ;
;
![]() ;
;
![]()
Условия и уравнения равновесия пространственной системы сходящихся сил
Геометрическое условие:
Пространственная система сходящихся сил находится в равновесии, если многоугольник сил замкнут, т.е. начало первого вектора совпадает с концом последнего; при этом равнодействующая FΣ=0.
Аналитическое условие:
Для равновесия пространственной системы сходящихся сил необходимо и достаточно, чтобы алгебраические суммы проекций всех сил на три взаимно перпендикулярные оси координат были равны нулю.