

-
Вибір мікропроцесорних засобів автоматизації
Програмовані логічні контролери (ПЛК) є постійно функціонуючими пристроями з можливостями цифрової обробки даних, призначеними для управління у реальному часі в промисловості. ПЛК об'єднує в собі пристрої вводу/виводу (I/O) і блок центрального процесора (CPU).
ПЛК Modicon Micro мають фіксований набір пристроїв вводу/виводу. Компоненти вводу/виводу вбудовані в той же корпус, що і центральний процесор. Таке об'єднання забезпечує малі розміри, вагу, мінімальну вартість і відмову від додаткових пристроїв в широкому діапазоні задач управління.
Рис.4. демонструє основні компоненти ПЛК Modicon Micro. ПЛК контролює стан групи пристроїв шляхом причитування сигналів від них із своїх входів, за допомогою CPU виконує програму користувача, і потім інша група пристроїв формує відповідну дію посилкою сигналів управління на виходи ПЛК.
Входи розташовані по верхньому краю корпусу ПЛК. Входи мають клеми для підключення опитуваних пристроїв, таких як кнопки, перемикачі, контакти пускачів для двигунів, координатних маніпуляторів, або кінцеві вимикачі. Якщо при опитуванні входу такий давач закритий (замкнутий), то пристрій введення перетворить вхідну напругу в логічний рівень сигналу, зрозумілий центральному процесору. Цей стан давача (логічна 1) позначають ще як ON (Закритий), а логічний 0 позначають як OFF (Відкритий).
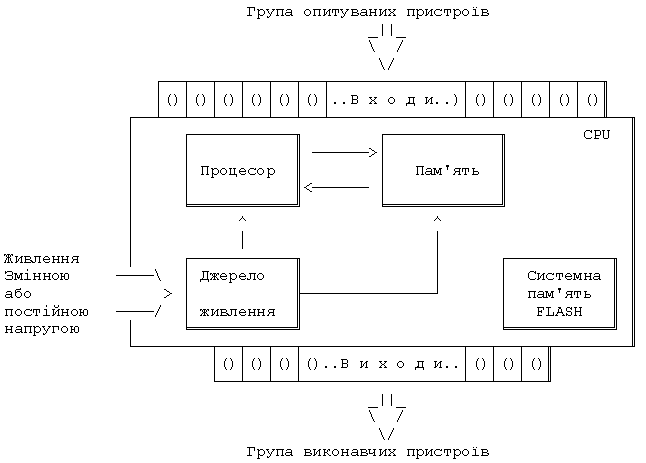
Рис. 4. Основні компоненти ПЛК Modicon Micro
Усередині CPU є центральний процесор, пам'ять і джерело живлення. Ці компоненти взаємодіють при реалізації команд програмної логіки і передають сигнали управління на виходи. CPU прочитує перетворені дані входів, виконує програмну логіку користувача, що зберігається в пам'яті, потім записує відповідні результату вихідні сигнали для групи виконуючих пристроїв.
Процес читання вхідних сигналів, виконання логіки, що базується на станах входів і потім зміна пристроїв виводу називається СКАНУВАННЯМ.
У CPU міститься також блок системної пам'яті, де постійно знаходиться операційна система ПЛК. Системна пам'ять енергонезалежна їй не потрібне підживлення від акумулятора.
Операційна система, що зберігається в системній пам'яті, є сукупністю супервізорних програм, що визначають можливості ПЛК при: 1) розпізнаванні мови команд, на якій написана прикладна програма, - т.з. сходинкової логіки; 2) розподілі ресурсів пам'яті ПЛК для спеціальних цілей; 3) визначенні структури даних, які обробляє ПЛК.
Розподіл пам'яті
Для існуючої системи сходинкової логіки ПЛК Modicon Micro доступна системі пам'ять підрозділяється на 3 класи:
- ОБЛАСТЬ ДАНИХ КОРИСТУВАЧА – для збереження даних, які змінюються під час виконання програми;
- ОБЛАСТЬ КОНФІГУРАЦІЇ СИСТЕМИ - для зберігання таблиць системних даних, таких як карта вводу/виводу і значення системних установок ПЛК;
- ОБЛАСТЬ ПРОГРАМИ КОРИСТУВАЧА - де створюється і редагується програма сходинкової логіки.
Область пам'яті даних користувача відноситься до пам'яті типу RAM. ПЛК встановлює зв'язок кожного вхідного і вихідного сигналу, які використовуються в процесі управління, з адресою у області даних користувача. Відповідно значення вхідних/вихідних сигналів із області даних користувача можуть використовуватися в програмі сходинкової логіки. Моделі ПЛК 110CPU512 і 110CPU612 мають область даних користувача місткістю 2048 слів;
Для програмування сходинкової логіки ПЛК Modicon Micro використовують систему нумерації адрес для маніпулювання інформацією вводу/виводу і внутрішньої логіки. Перша цифра кожної адреси визначає тип даних вводу/виводу, які зберігаються за цією адресою; за головною цифрою слідують ще 4 цифри, які визначають унікальну адресу комірки в пам'яті даних користувача. Є 4 типи адрес.
Системна нумерація адрес вводу/виводу
|
Тип aдреси |
Пояснення |
|
0хххх |
Дискретний вихід (або котушка реле, coil). 0х-aдреса може використовуватися для зв'язку з реальними дискретними виходами на рознятті, або може використовуватися для встановлення стану проміжних бітів (імітованих реле) в пам'яті RAM. 0х-aдреси можуть бути використані в програмній логіці як котушка реле (coil) тільки один раз. Однак вони можуть бути застосовані багаторазово для зв'язку контактів в програмній логіці. |
|
1хххх |
Дискретний вхід. 1х-aдреса може використовуватися для зв'язку з реальними дискретними входами на рознятті, або може використовуватися для встановлення стану проміжних бітів (імітованих контактів) в пам'яті RAM. 1х-aдреси можуть бути застосовані для зв'язку контактів в логіці програми. |
|
3хххх |
Регістр вводу. 3х-регістр містить інформацію, що представляється у вигляді 16-бітового числа (слова даних) і одержує її від зовнішнього джерела, наприклад у вигляді координати положення, аналогового сигналу, даних від високошвидкісного лічильника. 3х-регістр може містити також 16 послідовних дискретних вхідних сигналів, які можуть бути введені в регістр в двійковому або двійково-десятковому (BCD) форматі. |
|
4хххх |
Регістр виводу або проміжного збереження. 4х-регістр може бути використаний для зберігання числових даних у області RAM або для передачі даних від CPU на пристрій виводу контролера. |
Кожне слово в пам'яті даних користувача має довжину 16 бітів. Стани (ON/OFF) кожної точки дискретного вводу/виводу представляються як значення 1 або 0, записуваних в окремі біти в слові (16 0х- або 1х-aдрес на одне слово).
Всі елементи сходинкової логіки контролера розбиті на 4 групи:1) релейні елементи; 2) таймери та лічильники; 3) цілочисельна математика; 4) додаткові елементи (наприклад, ПІД-регулятор).
Конфігурація контролера виконується як обов’язковий етап при створенні нової програми і може модифікуватись при редагуванні існуючої програми. При створенні нової програми конфігурація контролера виконується наступними кроками.
Крок 1. Включити панель програмування (комп’ютер), що містить MODSOFT Lite. Після запуску MODSOFT Lite вибрати Offline/New Program. Задати імя програми, її місцезнаходження та комунікаційні параметри.
Крок 2. Використовуючи системне меню MODSOFT Lite, увійти до редактора конфігурації.
Крок 3. В меню редактора конфігурації вибрати Over View / PLC type. Вибрати серію контролера Micro. Вибрати тип моделі ( наприклад, CPU 612.00) із переліку, запропонованого програмою.
Крок 4. Вибрати режим роботи ПЛК: ОДИНОЧНИЙ, ГОЛОВНИЙ або ПІДЛЕГЛИЙ.
Крок 5. Задати інші параметри конфігурації із меню Over View (Ranges, I/O Locations, Specials).
Крок 6. У випадку розширення контролера за допомогою додаткових модулів А120 необхідно вибрати у меню редактора конфігурації пункт I/O MAP, який дозволяє переглянути конфігурацію входів/виходів контролера, додати додаткові корзини (rack) та модулі.
Таблиця настроювання PID2 (верхній вузол + 20 регістрів)
|
Регістр |
Зміст |
|
4х |
ОБРОБЛЕНЕ ЗНАЧЕННЯ РЕГУЛЬОВАНОЇ ВЕЛИЧИНИ, PV (значення в технічних одиницях): завантажується в регістр при кожному скануванні; отримане як результат масштабування регістра 4х+13 з використанням нижньої і верхньої меж шкали в інж. одиницях із регістрів 4х+11 і 4х+12: Розр.PV = 4х+13 / 4095 * (4х+11 - 4х+12) + 4х+12 В результаті відкидається дробова частина - вона не округляється |
|
4х+1 |
ЗАДАНЕ ЗНАЧЕННЯ, SP (в інженерних одиницях): задається при настроюванні; значення повинне бути в межах від 4х+12 до 4х+11. |
|
4х+2 |
РЕГУЛЮЮЧА ДІЯ, MV: завантажується в блок при кожному обчисленні контура; змінюється в діапазоні 0 - 4095, для коректного відтворення на аналогових виходах; |
|
4х+3 |
ВЕРХНЯ АВАРІЙНА МЕЖА: значення в цьому регістрі визначає верхню устaвку аварії для PV (вищий SP); задається персоналом усередині інтервалу, обмеженого регістрами 4х+11 і 4х+12 |
|
4х+4 |
НИЖНЯ АВАРІЙНА МЕЖА: значення в цьому регістрі визначає нижню устaвку аварії для PV (нижчий SP); задається персоналом усередині інтервалу, обмеженого регістрами 4х+11 і 4х+12 |
|
4х+5 |
ПРОПОРЦІЙНИЙ ДІАПАЗОН: у цей регістр завантажується бажаною константою пропорційності в діапазоні 5 - 500; правильне значення в цьому регістрі необхідне для виконання команди PID2 |
|
4х+6 |
ПОСТІЙНА ЧАСУ ІНТЕГРУВАННЯ: завантажується в цей регістр для додаткової операції інтегрування в обчисленнях; значення цієї постійної знаходиться в діапазоні 0 - 9999, відображає значення 0.00 - 99.99 повторів в хвилину; значення < 0 і > 9999 зупиняє виконання PID2; чим більше число, тим більше вплив інтеграції |
|
4х+7 |
ПОСТІЙНА ЧАСУ ДИФЕРЕНЦІЮВАННЯ : завантажується в цей регістр для додаткової операції диференціювання в обчисленнях; значення цієї постійної знаходиться в діапазоні 0 - 9999, відображає значення 0.00 - 99.99 повторів в хвилину; значення < 0 і > 9999 зупиняє виконання; чим більше число, тим більше вплив диференціювання |
|
4х+8 |
ЗСУВ: завантаження цього регістра додає зсув до виходу - значення, яке напряму підсумовується з MV, повинне бути між 0 і 4095 |
|
4х+9 |
ВЕРХНЯ МЕЖА ОБЧИСЛЕННЯ ІНТЕГРАЛА: завантажується верхньою межею значення виходу (між 0 і 4095), коли відбувається відмова від накопичення інтеграла; якщо задане значення (зазвичай 4095) перевищене, то сума інтеграла дaлі не змінюється |
|
4х+10 |
НИЖНЯ МЕЖА ОБЧИСЛЕННЯ ІНТЕГРАЛА: завантажується нижньою межею значення виходу (між 0 і 4095), коли відбувається відмова від накопичення інтеграла; зазвичай задається 0 |
|
4х+11 |
ВЕРХНЯ МЕЖА ДІАПАЗОНУ УПРАВЛІННЯ: завантажується вищим значенням діапазону пристрою вимірювання - наприклад якщо діапазон термометра опору 0 - 500 гр., то береться значення 500; значення повинне бути задане цілою величиною 0 - 9999, воно зв'язується із значенням аналогового входу, що приймається рівним 4095 |
|
4х+12 |
НИЖНЯ МЕЖА ДІАПАЗОНУ УПРАВЛІННЯ: завантажується нижчим значенням діапазону пристрою вимірювання; має бути задано в діапазоні 0 - 9998, зв'язується із значенням аналогового входу, рівним 0; воно повинне бути менше знaчення, заданого в регістрі 4х+11 |
|
4х+13 |
НЕОБРОБЛЕНЕ ЗНАЧЕННЯ ВИМІРЮВАННЯ: програма завантажує у цей регістр значення для обчислення PV; вимірювання повинно бути лінеаризованим і знаходитися в діапазоні 0 - 4095 |
|
4х+14 |
ПОКАЖЧИК НА РЕГІСТР ЛІЧИЛЬНИКА КОНТУРА: завантажене вами у цей регістр значення вказує на регістр, який вважає число циклів, що обчислюється в кожному скануванні; значення, введене в регістр, є посиланням на номер регістра, де зберігається рахунок циклів - наприклад якщо рахунок зберігається в регістрі 41236, то введіть значення 1236 в регістр 4х+14 початкової таблиці PID2; значення винне бути завантажено в регістр 4х+14 перед блоком PID2 в логиці програми |
|
4х+15 |
МАКСИМАЛЬНЕ ЧИСЛО ЦИКЛІВ СКАНУВАННЯ: якщо регістр 4х+14 містить ненульове значення, вам потрібно завантажити число в даний регістр для завдання граничного числа циклів, що виконуються на одному скануванні |
|
4х+16 |
ПОКАЖЧИК ДЛЯ СКИДАННЯ ВХОДУ ЗВОРОТНЬОГО ЗВ'ЯЗКУ: значення, котре завантажується вами в цей регістр, вказує на регістр, що містить значення зворотного зв'язку (F); виконання інтеграції покладається на значення F, зв’язане з Mv - як вихід PID2 змінюється від 0 до 4095, так і F повинне змінюватися в межах 0 - 4095; значення, введене у даний регістр, містить посилання на регістр зворотнього зв'язку - наприклад якщо регістр зворотнього зв'язку 42250, то у регістрі 4х+16 потрібно задати 2250 |
|
4х+17 |
ВЕРХНЯ МЕЖА ВИХОДУ: значення, введене в цей регістр, визначає верхню межу для Mv (зазвичай 4095) |
|
4х+18 |
НИЖНЯ МЕЖА ВИХОДУ: значення, введене в цей регістр, визначає нижню межу для Mv (зазвичай 0) |
|
4х+19 |
МЕЖА ШВИДКОСТІ ЗМІНИ: значення, введене в цей регістр, визначає ефективність диференціальної фільтрaції; діапазон зміни значення тут 2 - 30, чим менше значення, тим фільтрація сильніше відбувається |
|
4х+20 |
ПОКАЖЧИК КАНАЛУ ВВЕДЕННЯ: значення, введене в цей регістр, указує на регістр, що містить значення каналу введення (Т); значення Т пов'язане з входом затримки інтегрaлa кожного разу, коли обидва біта входів (режим і канал) для блоку PID2 в ON; введене в даний регістр значення являється посиланням на регістр каналу введення - наприклад якщо регістр каналу введення 40956, то в регістрі 4х+20 потрібно вказати 0956 |