

1. Система сходящихся сил
Сходящейся называется система сил, линии действия которых пересекаются в одной точке. Вектор, равный геометрической сумме сил какой-либо системы называется главным вектором этой системы сил.
1.1. При бескоординатном методе задания сил равнодейст-вующая определяется путем построения силового многоугольника.
![]()
![]() (1.1)
(1.1)
При определении равнодействующей системы сходящихся сил используют геометрический (графический) и аналитический способы.
1.1.1. Геометрический способ состоит в
графическом построении силового
многоугольника в некотором масштабе и
определяется по правилу параллелограмма
или силового многоугольника. Величина
и направление равнодействующей
![]() определяется из построения. Равнодействующая
определяется из построения. Равнодействующая
![]() соединяет начальную точку О с концом
последнего вектора.
соединяет начальную точку О с концом
последнего вектора.
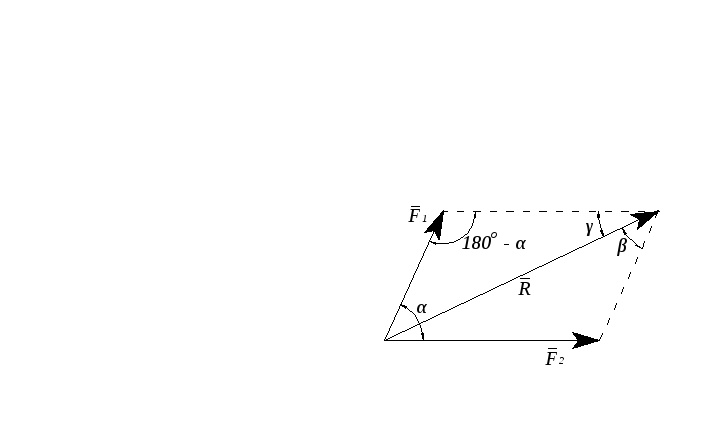
Рис. 1.1
Модуль вектора
![]() (рис. 1.1) определяется по формуле
(рис. 1.1) определяется по формуле
![]() (1.2)
(1.2)
Углы β и γ (рис. 1.1) между
равнодействующей
![]() и слагаемыми силами
и слагаемыми силами
![]() и
и
![]() вычисляют по теореме синусов:
вычисляют по теореме синусов:
![]()
![]() (1.3)
(1.3)
1.1.2. При координатном задании сил
![]() ,
,
![]() ,
…,
,
…,
![]() координаты равнодейст-вующей
координаты равнодейст-вующей
![]() определяются по формуле
определяются по формуле
![]()
![]() (1.4)
(1.4)
![]()
Модуль равнодействующей и ее направляющие косинусы определяются выражениями:
![]() R=
R=![]() (1.5)
(1.5)
cos
(x^,
![]() )=
)=![]() ;
;
cos
(y^,
![]() )=
)=![]() ;
;![]() (1.6)
(1.6)
cos(z^,![]() )=
)=![]() .
.
1.2. Условия равновесия системы сходящихся сил.
![]() =
=
![]() +
+![]() +
... +
+
... +![]() =
0. (1.7)
=
0. (1.7)
1.2.1. Геометрически условие (1.7) выражает тот факт, что силовой многоугольник уравновешенной системы сходящихся сил должен быть замкнутым, т.е. конец последней силы должен совпадать с началом первой силы.
1.2.2. Аналитическое условие равновесия (1.6) в координатной форме имеет вид:
![]()
![]() (1.8)
(1.8)
![]()
Таким образом, для равновесия системы сходящихся сил необходимо и достаточно равенство нулю алгебраических сумм проекции всех сил на координатные оси.
2. Произвольная система сил
2.1. Основная теорема статики.
Теорема. Всякая система сил эквивалентна главному вектору системы, приложенному в какой-либо точке тела (центре приве-дения) и главному моменту всех сил относительно этой точки.
Система сил приводится к главному вектору
![]() , (2.1)
, (2.1)
и главному моменту
![]() (2.2)
(2.2)
При координатном задании сил главный
вектор системы определяют по формулам
(1.4). Проекции главного вектора
![]() на
оси координат будут:
на
оси координат будут:
![]() ,
,
![]() (2.3)
(2.3)
![]()
Модуль главного вектора определяется по его проекциям на оси координат:
![]()
![]()
![]()
![]() (2.4)
(2.4)
а его направляющие косинусы определяются формулами:
cos (x^,![]() )
=
)
=![]() ,
,
cos
(y^,![]() )
=
)
=![]() ,
(2.5)
,
(2.5)
cos(z^,![]() )
=
)
=![]() .
.
Модуль и направляющие косинусы главного момента определяются формулами:
М
=![]() ; (2.6)
; (2.6)
cos (x^,![]() )
=
)
=
![]() ,
,
cos
(y^,![]() )
=
)
=![]() ,
(2.7)
,
(2.7)
cos (z^,![]() )
=
)
=![]() .
.
2.2. Условия равновесия произвольной системы сил.
Для равновесия произвольной системы сил необходимо и достаточно, чтобы одновременно выполнялись условия:
![]()
![]() .
(2.8)
.
(2.8)
При координатном задании сил главный вектор системы определяют (1.4, 1.5 и 1.6). Проекции главного вектора с началом в центре приведения О
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() . (2.9)
. (2.9)
2.3. Плоская система сил. Теорема Вариньона.
Большинство практических задач техники приводят к этому случаю воздействия сил на твердое тело.
Теорема. Если система сил, приложенных к твердому телу, приводится к равнодействующей, то момент этой равнодействующей относительно какой-либо точки равен сумме моментов всех сил системы относительно той же точки.
![]() . (2.10)
. (2.10)
Это выражение (2.10) известно как теорема Вариньона для плоской системы сил: алгебраическая сумма моментов всех сил плоской системы относительно любой точки равна моменту равнодействующей этой системы относительно той же точки.