

6. Автоматическое регулирование момента в системе уп-д с п-регулятором
Р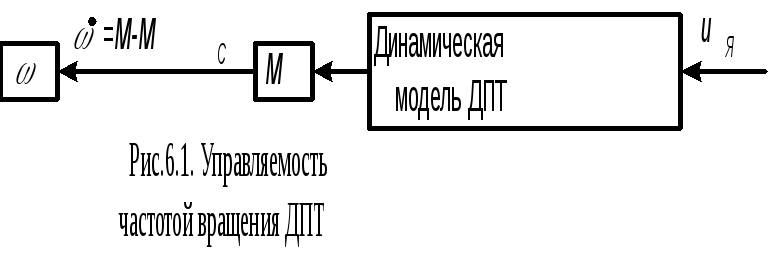
 егулирование
момента требуется в некоторых типах
электроприводов, таких как: автоматические
буксирные лебедки, устройства
позиционирования платформ и судов,
канатные системы перегрузки грузов с
судна на судно в море. Но и в других АЭП
использование момента для управления
частотой вращения является самым
простым. Из рис.6.1 видно, что изменение
вращающего момента М
двигателя ведет к прямо пропорциональному
изменению производной (углового
ускорения) от частоты вращения ω.
Между изменением напряжения uЯ
питания двигателя и частотой вращения
ω
такой пропорции не существует в принципе,
а связь намного сложнее, чем при
использовании момента М
для управления частотой.
егулирование
момента требуется в некоторых типах
электроприводов, таких как: автоматические
буксирные лебедки, устройства
позиционирования платформ и судов,
канатные системы перегрузки грузов с
судна на судно в море. Но и в других АЭП
использование момента для управления
частотой вращения является самым
простым. Из рис.6.1 видно, что изменение
вращающего момента М
двигателя ведет к прямо пропорциональному
изменению производной (углового
ускорения) от частоты вращения ω.
Между изменением напряжения uЯ
питания двигателя и частотой вращения
ω
такой пропорции не существует в принципе,
а связь намного сложнее, чем при
использовании момента М
для управления частотой.
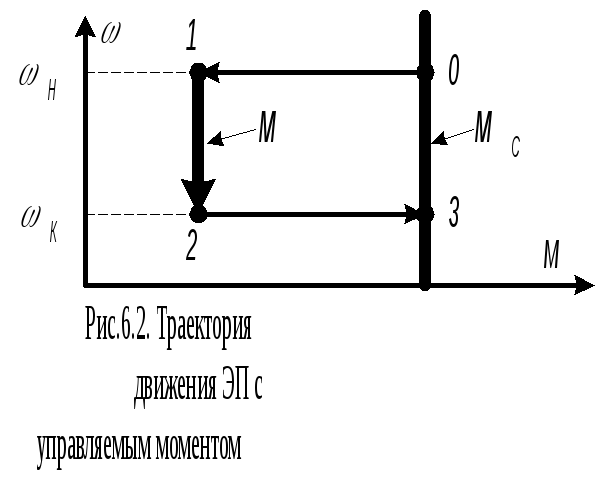
Траектория движения ЭП 0-1-2-3 (рис.6.2) при переводе его с некоторой начальной частоты вращения ωН на другую конечную частоту ωК сводится к простому кратковременному уменьшению вращающего момента М и восстановления его первоначального значения при достижении конечной частоты ωК. Можно с помощью момента М просто управлять временем перехода с начальной до конечной частоты согласно расчета:
 , (6.1)
, (6.1)
Если заданы время перехода t1-2 и частоты ωН и ωК, то необходимый вращающий момент определится из (6.1) как
![]() (6.2)
(6.2)
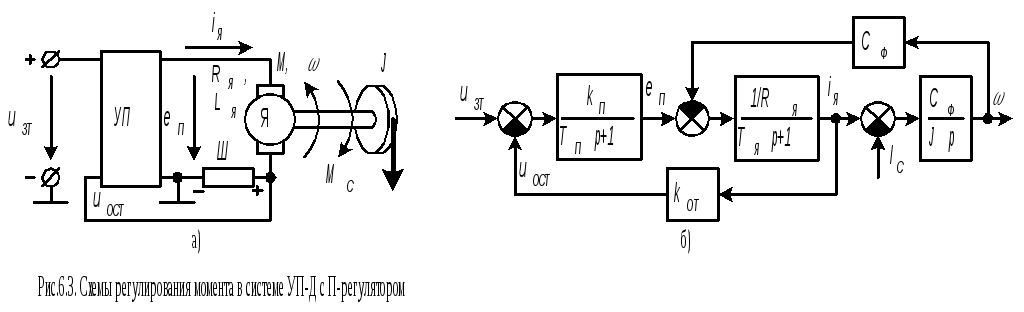
На функциональной схеме ЭП (рис.6.3а) с управляемым моментом источником питания ДПТ является управляемый преобразователь УП. Схема охвачено отрицательной обратной связью по току якоря iЯ, которому пропорционален вращающий момент М. Структурная схема АЭП приведена на рис.6.3б.
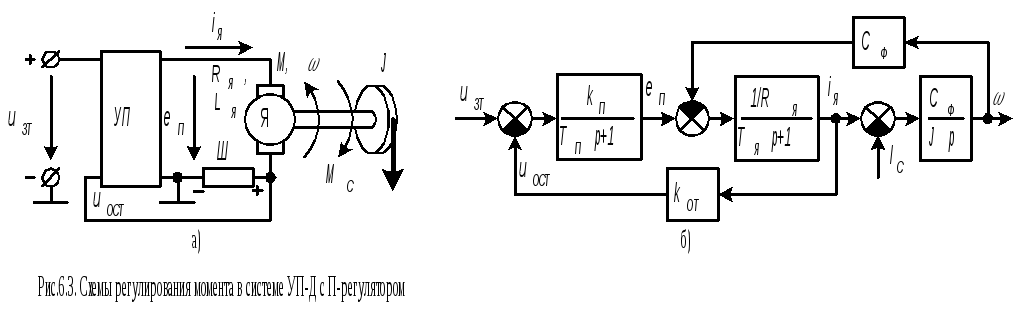
На схеме приведена передаточная функция управляемого преобразователя, который представляет собой апериодическое звено первого порядка. Коэффициент передачи kП можно считать коэффициентом передачи П-регулятора. Шунт представляет пропорциональное звено с коэффициентом передачи kOT.
Оценим динамические и статические показатели качества данного АЭП.
Структурная схема АЭП такова, что передаточная функция двигателя вместе с УП не может быть приведена к виду (2.4). Следовательно, к ней невозможно применить методы модального управления с целью получения прогнозируемых динамических показателей качества – времени регулирования tp и перерегулирования σ.
Д ля
определения статических характеристик
АЭП рассмотрим по структурной схеме
установившейся режим, считая выходным
сигналом схемы ток якоря iЯ.
В установившемся режиме производные
от всех сигналов схемы обращены в ноль,
что эквивалентно тому, что на структурной
схеме везде надо положить р=0.
Крайний правый блок на структурной
схеме рис.6.3б является интегрирующим
звеном, для которого установившийся
режим существует, если входной сигнал
(iЯ--IC)
блока равен нулю iЯ=IC
.Структурная
схема превратится в изображенную на
рис.6.4. Из нее следует система уравнений:
ля
определения статических характеристик
АЭП рассмотрим по структурной схеме
установившейся режим, считая выходным
сигналом схемы ток якоря iЯ.
В установившемся режиме производные
от всех сигналов схемы обращены в ноль,
что эквивалентно тому, что на структурной
схеме везде надо положить р=0.
Крайний правый блок на структурной
схеме рис.6.3б является интегрирующим
звеном, для которого установившийся
режим существует, если входной сигнал
(iЯ--IC)
блока равен нулю iЯ=IC
.Структурная
схема превратится в изображенную на
рис.6.4. Из нее следует система уравнений:
![]() (6.3)
(6.3)
Исключив из системы (6.3) переменную еП, получим электромеханическую и механическую характеристики АЭП с регулированием момента (тока):
![]()
 (6.4)
(6.4)
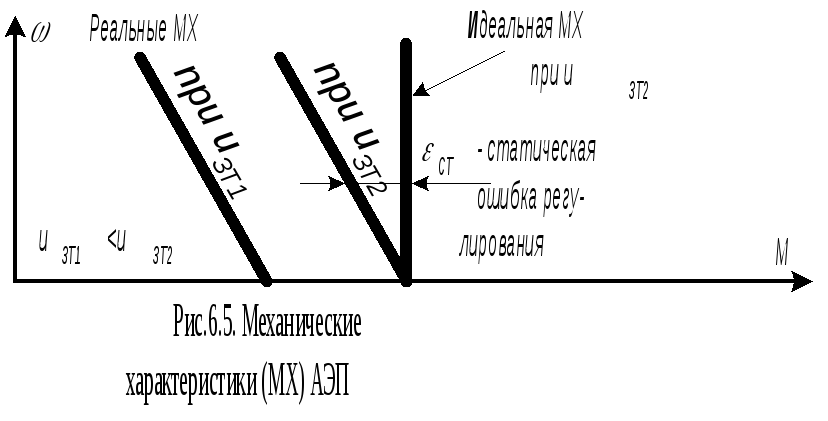
Механическая характеристика АЭП (рис.6.5) получается мягче, чем естественная за из-за увеличения в (1+kП kОТ/RЯ) раз коэффициента перед М. Частота холостого хода регулируется сигналом uЗТ. Реальные механические характеристики отличаются от идеальных, на которых момент не зависит от частоты вращения. Существует статическая ошибка регулирования εСТ. С реальными наклонными характеристиками сложнее управляемость двигателя, так как таких простых алгебраических формул расчета типа (6.2) уже не будет.