

Вопросы и задания
1. Приведите дифференциальные уравнения двухфазных обмоток статора в осях α-β и выражения пересчета типа (α-β) ← (u-v) сигналов статора.
2. Выполните вывод дифференциального уравнения обмотки статора по продольной оси u.
3. Выполните вывод дифференциального уравнения обмотки статора по поперечной оси v.
4. Приведите полную систему дифференциальных уравнений обмоток АД, содержащих потокосцепления и токи, в общих осях для статора и ротора. Какими выражениями нужно дополнить эту систему дифференциальных уравнений, что она былы бы разрешима ?
5. Приведите полную систему дифференциальных уравнений обмоток АД, содержащих только токи, в общих осях для статора и ротора.
6. Приведите выражения вращающего момента АД, выраженного через токи и потокосцепления обмоток в общих осях для статора и ротора.
7. Поясните, почему величина рП числа пар полюсов входит только в выражения вращающего момента ?
24. Уравнения и структурная схема ад в осях α-β, общих для статора и ротора. Расчеты токов обмоток
Уравнения АД в осях α-β, общих для статора и ротора, получаются из системы (23.7) с подстановкой в неё значения частоты вращения ωК=0 осей координат α-β и заменой индексов α←u и β←v:
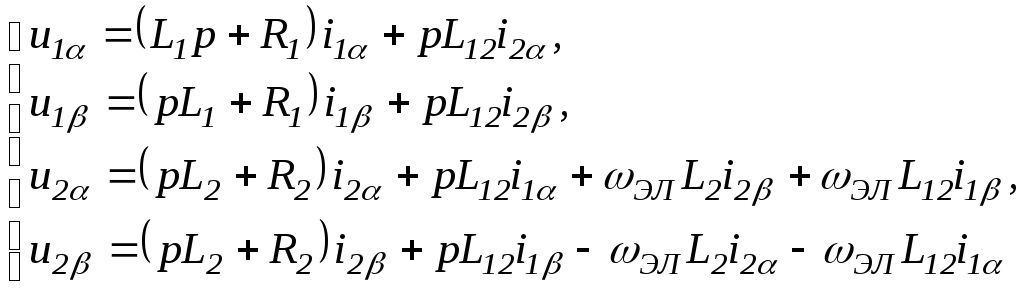 (24.1)
(24.1)
Уравнения цепи статора в осях α-β имеют естественный вид, совпадающий с уравнением статора системы (21.4), а уравнения цепи ротора входит частота ωЭЛ и его вид отличается от уравнений ротора в осях d-q (21.4).
Преобразуем систему (24.1) к виду
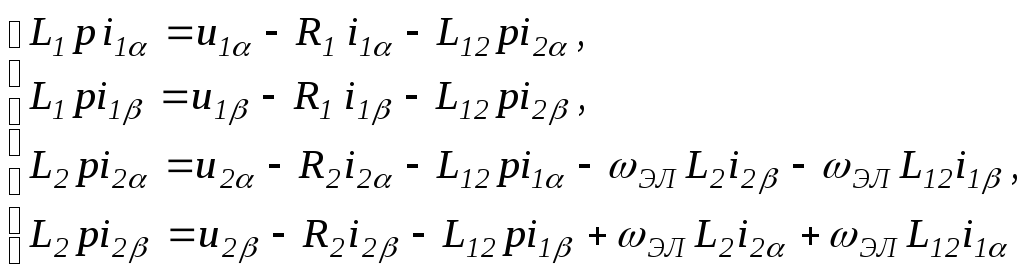 (24.2)
(24.2)
Для АД с короткозамкнутым ротором нужно принять u2α=0 и u2β=0.
Выражение вращающего момента АД берем согласно (23.8) вида
![]() (24.3)
(24.3)
Уравнение механики и связь между ωЭЛ и ω имеют вид
![]() (24.4)
(24.4)
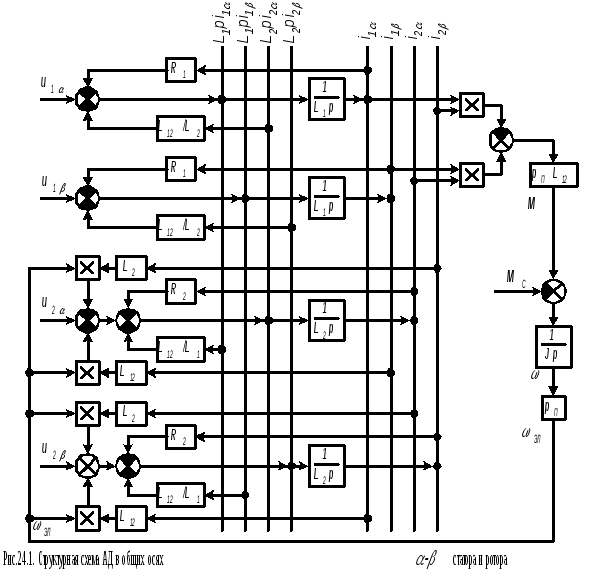
По (24.2), (24.3) и (24.4) построена на рис.24.1 структурная схема. Структурная схема может быть смоделирована на операционных усилителях и аналоговых перемножителях.
Из системы уравнений (24.1) или из аналоговой модели при известных входных сигналах-аргументах u1α, u1β, u2α, u2β и МС могут быть найдены все токи i1α, i1β, i2α, i2β, вращающий момент М и частота вращения ω АД. Напряжения u1α, u1β, u2α и u2β изменяются по гармоническому закону с частотой сети ω1, поэтому с частотой сети ω1 изменяются и токи i1α, i1β, i2α и i2β. Токи i1α и i1β являются реальными токами двухфазной обмотки статора в осях α-β, а токи i2α и i2β являются фиктивными токами двухфазной обмотки ротора в осях α-β, так как физическими осями ротора являются оси d-q и, соответственно, реальными токами двухфазного ротора являются токи i2d и i2q. Токи i2α и i2β можно пересчитать в токи i2d и i2q по формулам координатных преобразований (22.7):
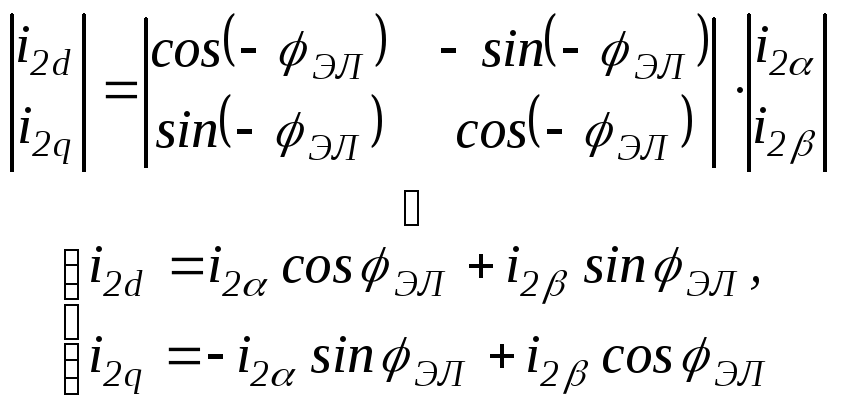 (24.5)
(24.5)
Пусть расчетом по системе (24.1) или моделированием по схеме рис.24.1 определены составляющие i2α=I2mcos(ω1t+φ10) и i2β= I2msin(ω1t+φ10) установившегося тока ротора. Частота вращения ротора равна ωЭЛ=(1-s)ω1, а его положение в пространстве осей α-β будет следующим φЭЛ=(1-s)ω1t+φЭЛ0.
С использованием формул (24.5) рассчитаем законы изменения токов i2d и i2q:
 (24.6)
(24.6)
 (24.7)
(24.7)
Составляющие i2d и i2q тока ротора I2 изменяются с частотой скольжения sω1, что соответствует действительности и доказывает правильность расчетов этих токов.