

Министерство образования и науки, молодежи и спорта Украины
Национальный аэрокосмический университет им. Н.Е.Жуковского
«Харьковский авиационный институт»
Кафедра 301
СИСТЕМА СТАБИЛИЗАЦИИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТ
Пояснительная записка к домашнему заданию
по курсу: «Цифровые системы управления»
Исполнитель: студент 340 группы
Хасанов О.И.
«___» ________________________
Проверил:
к.т.н., доцент каф.301
Симонов В.Ф.
«___» ________________________
Научный руководитель:
асистент каф. 301
Копысов О.Э.
«___» ________________________
2011
СОДЕРЖАНИЕ
Введение 3
1 Математическое описание системы управления БПЛА 5
1.1 Математическая модель объекта управления……………………… 5
1.2 Формирование функциональной схемы системы. 9
1.3 Формирование структурной схемы 6
2 Анализ и синтез САУ 18
2.1 Выбор периода квантования 18
2.2 Исследование цифровой системы управления 19
Заключение 21
Список используемых источников 22
Введение
Современная конструкция беспилотных аппаратов характеризуется широким использованием автоматизированных систем управления. Без них эффективное применение беспилотных летательных аппаратов (БПЛА) невозможно, потому что для его контроля, необходимо решения задачи удаленной ориентации и стабилизации оперативно и точно. Кроме того, для беспилотных летательных аппаратов, важной задачей является работа в соответствии с алгоритмом действий, независимо от любых случайных возмущающих воздействий, которые могут возникнуть в полете.
В настоящее время основным требованием к созданному систем управления, динамическими объектами и технологическими процессами становится требование безопасности, живучести, сохранении качества функционирования при возникновении чрезвычайных ситуаций.
Основные причины возникновения неисправностей, различных физических дефектов и неисправностей в системе управления, низкая надежность, несовершенство о технологии, вредных воздействий окружающей среды, влияние нагрузок (вибрации, удары, температуры и др.), неправильного использования и ряд других дестабилизирующих факторов, что приводит не только в недостатках отдельных устройств, но и нарушение функционирования летательного аппарата (ЛА). В связи с этим стали применять беспилотные летательные аппараты в мирных и военных целях, важной задачей которых является выполнение программы полета, независимо от любых случайных возмущающих воздействий, которые могут возникнуть во время полета.
Беспилотные летательные аппараты имеют явные преимущества перед пилотируемыми летательными аппаратами – в них нет необходимости оборудования систем жизнеобеспечения, дорогая подготовка пилотов не требуется, потребляется довольно меньше топлива, чтобы существенно снижает требования к аэродромам, он меньше по размерам и является более маневренным. Развития беспилотных летательных аппаратов тесно связаны с решениями задач автоматического управления полетом. Система управления должна обеспечивать выполнение полетных заданий в широком диапазоне режимов полета при наличии значительных внешних возмущений.
Широкий круг задач, решаемых БПЛА, в сочетании с их относительно небольшой себестоимостью и постоянной тенденцией к улучшению качества выполняемых ими задач, обеспечивают расширение этого сектора авиации . В настоящее время опубликовано достаточно большое количество статей, посвященных отдельным изделиям микросистемной авионики (микроакселерометры, микрогироскопы, АЦП, ЦАП, блоки систем ориентации и навигации и т.д.). Однако малые габариты и вес делают БПЛА более чувствительным к возмущениям внешней среды, поэтому является актуальной задача проектирования системы управления подобным БПЛА, которая позволит улучшить его показатели устойчивости и расширит его диапазоны применения.
Авионика БПЛА представляет собой комплекс аппаратных и программных средств - бортовую аппаратуру управления (БАУ), которая через радиоканал связи взаимодействует с наземной аппаратурой управления (НАУ). Авионика является частью системы автоматического управления (САУ) БПЛА и функционально объединяет планер БПЛА (объект управления) и рулевой привод (исполнительный орган). Она обеспечивает управление двигателем и рулевыми приводами для всех режимов полета БПЛА.
1 Математическое описание системы управления бпла
1.1 Математическая модель объект управления
Под математической моделью движения объекта понимают совокупность его характеристик, анализ которых позволяет определить реакцию объекта на допустимые входные воздействия при допустимых начальных условиях.
Математическая модель (ММ) представляет собой упрощённое описание его реального движения. При выборе математической модели объекта будем полагать, что его конструкция является недеформируемой. Это позволяет рассматривать объект при выводе уравнений его движения как твердое тело.
Математическую модель для любого вида движения (пространственное, боковое, продольное) и любого режима полета (старт, посадка, координированный разворот, снижение по спирали и т.д.) можно получить, основываясь на полной исходной системе нелинейных нестационарных дифференциальных уравнений, которая в общем случае включает в себя:
- три уравнения динамики центра масс БПЛА;
- три уравнения кинематики центра масс БПЛА;
- три уравнения динамики углового движения БПЛА;
- три уравнения кинематики углового движения БПЛА.
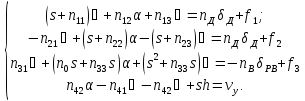
Полная исходная математическая модель БПЛА:

где






Получение линейных моделей основано на использовании методов линеаризации и декомпозиции. В процессе линеаризации на основе нелинейных уравнений формируют систему линейных дифференциальных уравнений и, применяя декомпозицию, получают упрощенную линейную модель.
Различают два основных метода линеаризации:
-
метод «замороженных коэффициентов»;
-
метод «малых возмущений».
В качестве заданных режимов полета будем рассматривать продольное движение - плоское движение, при котором вектор скорости центра масс совпадает с вертикальной плоскостью.
Продольное движение описывается следующими параметрами:
-
углом тангажа
 ;
; -
атаки
 ;
; -
высотой полета
 ;
;
скоростью
изменения угла тангажа .
.
При полете с незначительным изменением высоты получаем
Для рассмотрения короткопериодического движения используется система дифференциальных уравнений:

В горизонтальном полете эта система сведется к уравнениям:

где
 - угол атаки;
- угол атаки;
 -
угол тангажа;
-
угол тангажа;
 – отклонение
руля высоты;
– отклонение
руля высоты;
 – внешние
возмущения.
– внешние
возмущения.


Из уравнений (2.4) путем преобразования Лапласа при нулевых начальных условиях можно получить передаточные функции:

где
 .
.
Скорость самолета в горизонтальном полете определяется из уравнения

Самолет по отношению к скорости полета может бить устойчивым или неустойчивым в зависимости от взаимного протекания характеристик Р(V)и X(V)в точке их пересечения. Полагая, что скорость V0 соответствует равенству Р = X и беря линейные члены разложения функций Р(V)и Х(V)в ряды по малым приращениям ∆V=V— V0, преобразуем уравнение к виду:

Если
положить приближенно
 ,
то условие устойчивости самолета по
отношению к скорости полета примет вид
:
,
то условие устойчивости самолета по
отношению к скорости полета примет вид
:

При нарушении этого неравенства самолет становится неустойчивым по отношению к скорости полета.
Для БПЛА, мы имеем соответствующие коэффициенты:














