

П’ята ітерація тт
|
|
B1 |
B2 |
B3 |
B4 |
Запаси ai |
ai' |
|
|
A1 |
4 70
|
7
|
2 –
|
5 –
|
100 |
7-4=3 |
100-70=30 |
|
A2 |
3 10
|
6 –
|
1 110
|
8 –
|
0 |
К |
|
|
A3 |
9 –
|
3 70
|
6 –
|
2 70
|
0 |
К |
|
|
Заявки bj |
70 |
30 |
0 |
0 |
100 |
|
|
|
|
4-4=0 К |
7-7=0 |
К |
К |
|
|
|
|
bj' |
70-70=0 |
|
|
|
|
|
|
Таблиця 44
Шоста ітерація тт
|
|
B1 |
B2 |
B3 |
B4 |
Запаси ai |
ai' |
|
|
A1 |
4 70
|
7 30
|
2 –
|
5 –
|
30 |
7-7=0 К |
30-30=0 |
|
A2 |
3 10
|
6 –
|
1 110
|
8 –
|
0 |
К |
|
|
A3 |
9 –
|
3 70
|
6 –
|
2 70
|
0 |
К |
|
|
Заявки bj |
0 |
30 |
0 |
0 |
30 |
|
|
|
|
К |
7-7=0 К |
К |
К |
|
|
|
|
bj' |
|
30-30=0 |
|
|
|
|
|
В результаті одержано (m + n - 1) = 6 перевезень вантажу, отже складений опорний план не вироджений і ми можемо порахувати вартість його реалізації:
![]() у.г.о.
у.г.о.
У додатку 15 представлений текст процедури на алгоритмічної мові Delphi побудови опорного плану перевезень вантажу методом апроксимації Фогеля.
МЕТОДИ ЗНАХОДЖЕННЯ ОПТІМАЛЬНИХ ПЛАНІВ
ПЕРЕВЕЗЕНЬ ВАНТАЖУ
1. Симплексний метод оптимізації транспортних перевезень
Існує безліч методів оптимізації ТЗ, а точніше приведення до оптимального плану перевезень складеного раніше опорного (базисного) плану. До основних належать розподільний метод, метод потенціалів, метод диференційних рент.
Оскільки ТЗ є окремим випадком загальної задачі ЛП (ЗЗЛП), то до неї також цілком можливо застосувати всі стандартні методи її розв’язання (зокрема найвідоміший з них – симплексний метод), попередньо привівши ТЗ до вигляду задачі ЛП і врахувавши її специфічність. Для цього необхідно провести над математичною моделлю ТЗ ряд перетворень. Ці перетворення будемо здійснювати на конкретному прикладі ТЗ, а саме для m постачальників (m=3) і n споживачів продукції (n=4) (див. табл. 1).
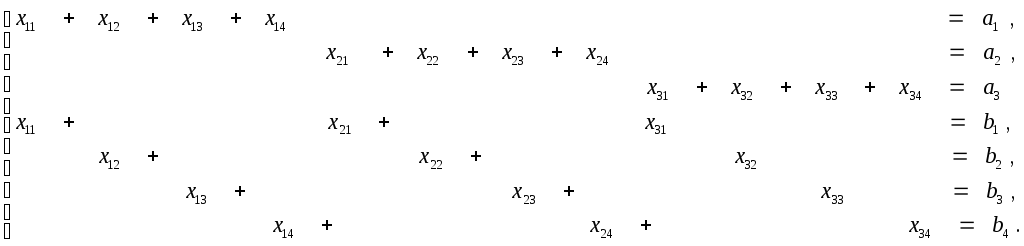
а) спочатку запишемо вихідну систему рівнянь ТЗ у такому вигляді:

|| || || ||
b1 b2 b3 b4
де: xij – кількість продукції, відправленої від і-го постачальника до j-го споживача;
аi – обсяг продукції наявної у і-го постачальника ( i=1, 2, 3);
bj – обсяг продукції необхідної j-ому споживачу (j=1, 2, 3, 4).
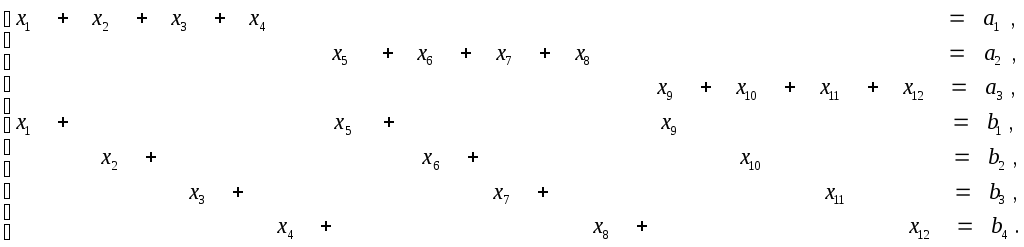
б) подамо її у вигляді системи (т + n) лінійних рівнянь таким чином:
в) замінимо x11 на x1, x12 на x2, x13 на x3, . . ., x34 на x12. Маємо:
г) додамо, як того вимагає симплексний метод, до всіх рівнянь додаткові перемінні, які становитимуть початковий базисний розв’язок ТЗ:
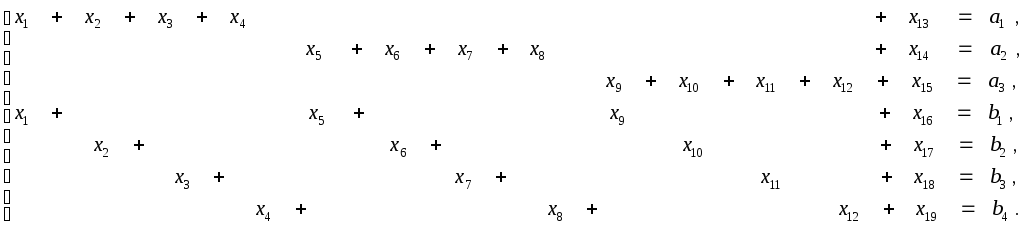
У результаті цих перетворень ми утворили систему (т + п) лінійних рівнянь з (mп + т+ n) позитивними перемінними, розв’язати яку можна за допомогою симплекс-методу. Оскільки сума рівнянь системи в рядках дорівнює сумі рівнянь системи в стовпцях, то ми одержали лінійно-залежну систему рівнянь. Щоб привести її до нормального (лінійно-незалежного) виду, одне з рівнянь системи (переважно останнє) можна без шкоди для кінцевого результату розв’язку ТЗ відкинути. Тоді ми матимемо (т + п – 1) лінійних рівнянь і (mп + т+ n - 1) перемінних.
Необхідно також відзначити те, що у класичній ТЗ перевезти продукцію від усіх постачальників (аi) потрібно так, щоб усі замовлення були виконані (bj), а загальна вартість (L) транспортних перевезень була б мінімальною, тобто:
![]() ,
,
де: с1 , с2, ... сk – вартість перевезення одиниці продукції від кожного постачальника до кожного споживача (k = 1,т п).
Розглянемо розв'язання ТЗ на конкретному прикладі, умови якого дані у вигляді ТТ (табл. 45) , де т = 3 , n = 4. Відповідно, кількість рівнянь становитиме (m + n – 1 ) = 6, кількість вихідних перемінних – (m × n) = 12 і кількість додаткових перемінних – (т + п – 1) = 6.
Таблиця 45
Дані ТЗ у вигляді ТТ
|
|
B1 |
B2 |
B3 |
B4 |
Запаси ai |
|
A1 |
c1 = 4 x1
|
c2 = 7 x2
|
c3 = 2 x3
|
c4 = 5 x4
|
100 |
|
A2 |
c5 = 3 x5
|
c6 = 6 x6
|
c7 = 1 x7
|
c8 = 8 x8
|
120 |
|
A3 |
c9 = 9 x9
|
c10 = 3 x10
|
c11 = 6 x11
|
c12 = 2 x12
|
140 |
|
Заявки bj |
80 |
100 |
110 |
70 |
360 |
Запишемо умову нашої ТЗ у термінах ЗЗЛП.
Необхідно мінімізувати цільову функцію L = 4× x1 +7 × x2 +2 × x3 +5 × x4 +3 × x5 + 6 × x6 +1×x7+8 × x8 +9 × x9 +3 × x10 + 6 × x11 +2×x12,
за таких обмежень:

тобто кількість рівнянь становить 6, а кількість вихідних перемінних дорівнює 12.
Вводимо до обмежень нові змінні x13, x14, x15, x16, x17, x18. Значення відповідних коефіцієнтів впливу вибираємо набагато більші ніж існують. У нашому випадку приймемо за цю величину суму всіх коефіцієнтів при невідомих у початковій цільовій функції, тобто 56. Завдяки цьому перемінні x13, x14, x15, x16, x17, x18 з базисних поступово будуть переведені у вільні, що забезпечує тим самим мінімум цільової функції. Після введення нових перемінних маємо:
L = 4× x1 +7 × x2 +2 × x3 +5 × x4 +3 × x5 + 6 × x6 +1×x7+8 × x8 +9 × x9 +3 × x10 + 6 × x11 +2×x12+56 × x13 +56 × x14 +56 × x15 + 56 × x16 +56×x17+56 × x18, → min,
за обмежень

Остаточна кількість рівнянь k = 6; кількість перемінних l = 18.
За базисні обираємо x13, x14, x15, x16, x17, x18 і отримуємо перше базисне рішення X = {0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 100, 120, 140, 80, 100, 110}, що забезпечує L = 56 × 100 + 56 × 120 +56 × 140 + 56 × 80 + 56 × 100 +56 × 110 = 36400 у.г.о.
Складемо першу симплекс-таблицю (СТ) – табл. 46. У першому рядку цієї таблиці знаходяться значення коефіцієнтів cj при невідомих цільової функції; у першій графі СТ розташовані значення коефіцієнтів cбі при базових невідомих цільової функції; друга графа містить самі базові невідомі хбі; третя – значення базових невідомих bбi (у першій СТ це значення правих частин останньої системи рівнянь) і частина СТ, що залишилася, крім останнього рядка, зайнята коефіцієнтами aij при невідомих також останньої системи рівнянь.
Останній рядок (індексний ряд) служить для розрахунків індексів ∆j , що є характеристиками оптимальності отриманого плану. Індекси розраховуються за допомогою наступних формул:
![]()
![]()
Таблиця 46
Перша СТ
|
|
4 |
7 |
2 |
5 |
3 |
6 |
1 |
8 |
9 |
3 |
6 |
2 |
56 |
56 |
56 |
56 |
56 |
56 |
||
|
cбі |
хбі |
bбі |
х1 |
х2 |
х3 |
х4 |
х5 |
х6 |
х7 |
х8 |
х9 |
х10 |
х11 |
х12 |
х13 |
х14 |
х15 |
х16 |
х17 |
х18 |
|
56 |
х13 |
100 |
1 |
1 |
1 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
|
56 |
х14 |
120 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
1 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
|
56 |
х15 |
140 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
1 |
0 |
0 |
1 |
0 |
0 |
0 |
|
56 |
х16 |
80 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
|
56 |
х17 |
100 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
|
56 |
х18 |
110 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
|
∆0 = 36400 |
∆1= 108 |
∆2=105 |
∆3=110 |
∆4=51 |
∆5=109 |
∆6=106 |
∆7=111 |
∆8=48 |
∆9=103 |
∆10=109 |
∆11= 106 |
∆12=54 |
∆13=0 |
∆14=0 |
∆15=0 |
∆16=0 |
∆17=0 |
∆18=0 |
||
Вважається,
що отримане рішення хбі
![]() є оптимальним, якщо
є оптимальним, якщо
![]() .
.
Порахуємо значення індексів для першої СТ:
∆0 = 56 × 100 + 56 × 120 +56 × 140 + 56 × 80 +56 × 100 + 56 × 110 = 36400 у.г.о.
∆1 = 56 × 1 + 56 × 0 +56 × 0 + 56 × 1 +56 × 0 + 56 × 0 – 4 = 108
∆2 = 56 × 1 + 56 × 0 +56 × 0 + 56 × 0 +56 × 1 + 56 × 0 – 7 = 105
∆3 = 56 × 1 + 56 × 0 +56 × 0 + 56 × 0 +56 × 0 + 56 × 1 – 2 = 110
∆4 = 56 × 1 + 56 × 0 +56 × 0 + 56 × 0 +56 × 0 + 56 × 0 – 5 = 51
∆5 = 56 × 0 + 56 × 1 +56 × 0 + 56 × 1 +56 × 0 + 56 × 0 – 3 = 109
∆6 = 56 × 0 + 56 × 1 +56 × 0 + 56 × 0 +56 × 1 + 56 × 0 – 6 = 106
∆7 = 56 × 0 + 56 × 1 +56 × 0 + 56 × 0 +56 × 0 + 56 × 1 – 1 = 111
∆8 = 56 × 0 + 56 × 1 +56 × 0 + 56 × 0 +56 × 0 + 56 × 0 – 8= 48
∆9 = 56 × 0 + 56 × 0 +56 × 1 + 56 × 1 +56 × 0 + 56 × 0 – 9 = 103
∆10 = 56 × 0 + 56 × 0 +56 × 1 + 56 × 0 +56 × 1 + 56 × 0 – 3 = 109
∆11 = 56 × 0 + 56 × 0 +56 × 1 + 56 × 0 +56 × 0 + 56 × 1 – 6 = 106
∆12 = 56 × 0 + 56 × 0 +56 × 1 + 56 × 0 +56 × 0 + 56 × 0 – 2 = 54
∆13 = 56 × 1 + 56 × 0 +56 × 0 + 56 × 0 +56 × 0 + 56 × 0 – 56 = 0
∆14 = 56 × 0 + 56 × 1 +56 × 0 + 56 × 0 +56 × 0 + 56 × 0 – 56 = 0
∆15 = 56 × 0 + 56 × 0 +56 × 1 + 56 × 0 +56 × 0 + 56 × 0 – 56 = 0
∆16 = 56 × 0 + 56 × 0 +56 × 0 + 56 × 1 +56 × 0 + 56 × 0 – 56 = 0
∆17 = 56 × 0 + 56 × 0 +56 × 0 + 56 × 0 +56 × 1 + 56 × 0 – 56 = 0
∆18 = 56 × 0 + 56 × 0 +56 × 0 + 56 × 0 +56 × 0 + 56 × 1 – 56 = 0
Очевидно, що базове рішення не є оптимальним, тому що усі індекси від ∆1 до ∆18 позитивні, тому продовжимо поліпшення (оптимізацію) базового плану далі.
У якості ключового стовпця, який містить внесену в базу вільну змінну, вибираємо стовпець х7, що має максимальне позитивне значення ∆7 = 111. Для визначення ключового рядка рахуємо відповідні відношення значень базових невідомих bбi на не нульові значення елементів обраного ключового стовпця, а саме:
![]() ;
;
![]() і вибираємо з них мінімальне, тобто
друге.
і вибираємо з них мінімальне, тобто
друге.
Тоді ключовим рядком буде шостий і він містить базову змінну х18 , що виводиться з базису. Тобто змінна ключового шостого рядка базису х18 має бути замінена на вільну змінну ключового стовпця х7 , при цьому ключове число a67 = 1 (це число відмічено у СТ більшим розміром). Складаємо нову СТ (див. табл. 47).
Спочатку введемо в базис замість змінної х18 змінну х7 зі значенням її коефіцієнта c7 = 1 і розділимо всі елементи цього рядка на ключове число a67 = 1. Після цього перерахуємо значення частини елементів таблиці, що залишилася, таким способом:
![]()
![]() ,
,
де: НЕ і СЕ – відповідно будь-який новий елемент (aijн або biн) з не ключового рядка і той же старий елемент (aij або bi) СТ, що перетворюється;
ЕКр і ЕКст – відповідно елементи ключового рядка і ключового стовпчику СТ, що перетворюється;
К – ключовий елемент СТ, що перетворюється (у нашому випадку для першої СТ це a67).
Порахуємо як приклад по цій формулі нові значення b2 , a23 і a27:
![]()
![]()
![]() .
.
Інші елементи перенесемо в нову СТ без демонстрації аналогічних детальних розрахунків.
Як видно з таблиці 47 нове значення цільової функції дорівнює 24190 у.г.о., що значно менше попереднього її значення і, що, у свою чергу, свідчить про нормальний плин процесу оптимізації. Індексний рядок нової СТ містить позитивні елементи – це означає, що отримане значення не є оптимальним і план перевезень вимагає поліпшення. Відзначимо в СТ ключовий елемент a25 і опускаючи всі розрахунки перейдемо до наступної СТ (див. табл. 48).
Таблиця 47
Друга СТ
|
|
4 |
7 |
2 |
5 |
3 |
6 |
1 |
8 |
9 |
3 |
6 |
2 |
56 |
56 |
56 |
56 |
56 |
56 |
||
|
cбі |
хбі |
bбі |
х1 |
х2 |
х3 |
х4 |
х5 |
х6 |
х7 |
х8 |
х9 |
х10 |
х11 |
х12 |
х13 |
х14 |
х15 |
х16 |
х17 |
х18 |
|
56 |
х13 |
100 |
1 |
1 |
1 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
|
56 |
х14 |
10 |
0 |
0 |
-1 |
0 |
1 |
1 |
0 |
1 |
0 |
0 |
-1 |
0 |
0 |
1 |
0 |
0 |
0 |
-1 |
|
56 |
х15 |
140 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
1 |
0 |
0 |
1 |
0 |
0 |
0 |
|
56 |
х16 |
80 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
|
56 |
х17 |
100 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
|
1 |
х7 |
110 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
|
∆0 = 24190 |
∆1= 108 |
∆2=105 |
∆3= -1 |
∆4=51 |
∆5=109 |
∆6=106 |
∆7=0 |
∆8=48 |
∆9=103 |
∆10=109 |
∆11= -5 |
∆12=54 |
∆13=0 |
∆14=0 |
∆15=0 |
∆16=0 |
∆17=0 |
∆18= -111 |
||
Із цієї СТ також видно, що процес оптимізації триває (нове значення цільової функції дорівнює 23100), але в індексному рядку ще присутні позитивні елементи – це означає, що план перевезень вимагає подальшого поліпшення. Відзначимо також у СТ ключовий елемент a5,10 і перейдемо до наступної СТ (див. табл. 49).
Таблиця 48
Третя СТ
|
|
4 |
7 |
2 |
5 |
3 |
6 |
1 |
8 |
9 |
3 |
6 |
2 |
56 |
56 |
56 |
56 |
56 |
56 |
||
|
cбі |
хбі |
bбі |
х1 |
х2 |
х3 |
х4 |
х5 |
х6 |
х7 |
х8 |
х9 |
х10 |
х11 |
х12 |
х13 |
х14 |
х15 |
х16 |
х17 |
х18 |
|
56 |
х13 |
100 |
1 |
1 |
1 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
|
3 |
х5 |
10 |
0 |
0 |
-1 |
0 |
1 |
1 |
0 |
1 |
0 |
0 |
-1 |
0 |
0 |
1 |
0 |
0 |
0 |
-1 |
|
56 |
х15 |
140 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
1 |
0 |
0 |
1 |
0 |
0 |
0 |
|
56 |
х16 |
70 |
1 |
0 |
1 |
0 |
0 |
-1 |
0 |
-1 |
1 |
0 |
1 |
0 |
0 |
-1 |
0 |
1 |
0 |
1 |
|
56 |
х17 |
100 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
|
1 |
х7 |
110 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
|
∆0 = 23100 |
∆1= 108 |
∆2=105 |
∆3= 108 |
∆4=51 |
∆5=0 |
∆6= -3 |
∆7=0 |
∆8= -61 |
∆9=103 |
∆10=109 |
∆11= 104 |
∆12=54 |
∆13=0 |
∆14= -109 |
∆15=0 |
∆16=0 |
∆17=0 |
∆18= -2 |
||
У цій таблиці також присутні позитивні елементи в індексному рядку, тому переходимо до нового СТ із новим ключовим елементом – a41 (див. табл. 50).
Таблиця 49
Четверта СТ
|
|
4 |
7 |
2 |
5 |
3 |
6 |
1 |
8 |
9 |
3 |
6 |
2 |
56 |
56 |
56 |
56 |
56 |
56 |
||
|
cбі |
хбі |
bбі |
х1 |
х2 |
х3 |
х4 |
х5 |
х6 |
х7 |
х8 |
х9 |
х10 |
х11 |
х12 |
х13 |
х14 |
х15 |
х16 |
х17 |
х18 |
|
56 |
х13 |
100 |
1 |
1 |
1 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
|
3 |
х5 |
10 |
0 |
0 |
-1 |
0 |
1 |
1 |
0 |
1 |
0 |
0 |
-1 |
0 |
0 |
1 |
0 |
0 |
0 |
-1 |
|
56 |
х15 |
40 |
0 |
-1 |
0 |
0 |
0 |
-1 |
0 |
0 |
1 |
0 |
1 |
1 |
0 |
0 |
1 |
0 |
-1 |
0 |
|
56 |
х16 |
70 |
1 |
0 |
1 |
0 |
0 |
-1 |
0 |
-1 |
1 |
0 |
1 |
0 |
0 |
-1 |
0 |
1 |
0 |
1 |
|
3 |
х10 |
100 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
|
1 |
х7 |
110 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
|
∆0 = 12200 |
∆1= 108 |
∆2= -4 |
∆3= 108 |
∆4=51 |
∆5=0 |
∆6= -112 |
∆7=0 |
∆8= -61 |
∆9=103 |
∆10=0 |
∆11= 104 |
∆12=54 |
∆13=0 |
∆14=-109 |
∆15=0 |
∆16=0 |
∆17= -109 |
∆18= -2 |
||
У цій таблиці також присутні позитивні елементи в індексному рядку, тому переходимо до нового СТ із новим ключовим елементом – a3,12 (див. табл. 51).
Таблиця 50
П’ята СТ
|
|
4 |
7 |
2 |
5 |
3 |
6 |
1 |
8 |
9 |
3 |
6 |
2 |
56 |
56 |
56 |
56 |
56 |
56 |
||
|
cбі |
хбі |
bбі |
х1 |
х2 |
х3 |
х4 |
х5 |
х6 |
х7 |
х8 |
х9 |
х10 |
х11 |
х12 |
х13 |
х14 |
х15 |
х16 |
х17 |
х18 |
|
56 |
х13 |
30 |
0 |
1 |
0 |
1 |
0 |
1 |
0 |
1 |
-1 |
0 |
-1 |
0 |
1 |
1 |
0 |
-1 |
0 |
-1 |
|
3 |
х5 |
10 |
0 |
0 |
-1 |
0 |
1 |
1 |
0 |
1 |
0 |
0 |
-1 |
0 |
0 |
1 |
0 |
0 |
0 |
-1 |
|
56 |
х15 |
40 |
0 |
-1 |
0 |
0 |
0 |
-1 |
0 |
0 |
1 |
0 |
1 |
1 |
0 |
0 |
1 |
0 |
-1 |
0 |
|
4 |
х1 |
70 |
1 |
0 |
1 |
0 |
0 |
-1 |
0 |
-1 |
1 |
0 |
1 |
0 |
0 |
-1 |
0 |
1 |
0 |
1 |
|
3 |
х10 |
100 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
|
1 |
х7 |
110 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
|
∆0 = 4640 |
∆1= 0 |
∆2= -4 |
∆3= 0 |
∆4=51 |
∆5=0 |
∆6= -4 |
∆7=0 |
∆8= 47 |
∆9= -5 |
∆10=0 |
∆11= -4 |
∆12=54 |
∆13=0 |
∆14= -1 |
∆15=0 |
∆16= -108 |
∆17= -109 |
∆18= -110 |
||
У цій таблиці також присутні позитивні елементи в індексному рядку, тому переходимо до нового СТ із новим ключовим елементом – a1,4 (див. табл. 52).
Отримана
симплекс-таблиця містить усі
![]() , завдяки чому можна стверджувати, що
отримане рішення є оптимальним, тобто:
х1
= 70; х2
= 0; х3
= 0; х4
= 30; х5
= 10; х6
= 0;
х7
= 110; х8
= 0;
х9
= 0;
х10
= 100; х11
= 0;
х12
= 40; х13
= 0; х14
= 0; …; х18
= 0, що забезпечує
Lopt
= 950
у.г.о.
, завдяки чому можна стверджувати, що
отримане рішення є оптимальним, тобто:
х1
= 70; х2
= 0; х3
= 0; х4
= 30; х5
= 10; х6
= 0;
х7
= 110; х8
= 0;
х9
= 0;
х10
= 100; х11
= 0;
х12
= 40; х13
= 0; х14
= 0; …; х18
= 0, що забезпечує
Lopt
= 950
у.г.о.
Представимо одержаний оптимальний план перевезень вантажу для нашого прикладу у вигляді ТТ (табл. 53).
Таблиця 51
Шоста СТ
|
|
4 |
7 |
2 |
5 |
3 |
6 |
1 |
8 |
9 |
3 |
6 |
2 |
56 |
56 |
56 |
56 |
56 |
56 |
||
|
cбі |
хбі |
bбі |
х1 |
х2 |
х3 |
х4 |
х5 |
х6 |
х7 |
х8 |
х9 |
х10 |
х11 |
х12 |
х13 |
х14 |
х15 |
х16 |
х17 |
х18 |
|
56 |
х13 |
30 |
0 |
1 |
0 |
1 |
0 |
1 |
0 |
1 |
-1 |
0 |
-1 |
0 |
1 |
1 |
0 |
-1 |
0 |
-1 |
|
3 |
х5 |
10 |
0 |
0 |
-1 |
0 |
1 |
1 |
0 |
1 |
0 |
0 |
-1 |
0 |
0 |
1 |
0 |
0 |
0 |
-1 |
|
2 |
х12 |
40 |
0 |
-1 |
0 |
0 |
0 |
-1 |
0 |
0 |
1 |
0 |
1 |
1 |
0 |
0 |
1 |
0 |
-1 |
0 |
|
4 |
х1 |
70 |
1 |
0 |
1 |
0 |
0 |
-1 |
0 |
-1 |
1 |
0 |
1 |
0 |
0 |
-1 |
0 |
1 |
0 |
1 |
|
3 |
х10 |
100 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
|
1 |
х7 |
110 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
|
∆0 = 2480 |
∆1= 0 |
∆2= 50 |
∆3= 0 |
∆4=51 |
∆5=0 |
∆6= 50 |
∆7=0 |
∆8= 47 |
∆9= -59 |
∆10=0 |
∆11= -58 |
∆12=0 |
∆13=0 |
∆14= -1 |
∆15=-54 |
∆16= -108 |
∆17= -55 |
∆18= -110 |
||
Таблиця 52
Сьома СТ
|
|
4 |
7 |
2 |
5 |
3 |
6 |
1 |
8 |
9 |
3 |
6 |
2 |
56 |
56 |
56 |
56 |
56 |
56 |
||
|
cбі |
хбі |
bбі |
х1 |
х2 |
х3 |
х4 |
х5 |
х6 |
х7 |
х8 |
х9 |
х10 |
х11 |
х12 |
х13 |
х14 |
х15 |
х16 |
х17 |
х18 |
|
5 |
х4 |
30 |
0 |
1 |
0 |
1 |
0 |
1 |
0 |
1 |
-1 |
0 |
-1 |
0 |
1 |
1 |
0 |
-1 |
0 |
-1 |
|
3 |
х5 |
10 |
0 |
0 |
-1 |
0 |
1 |
1 |
0 |
1 |
0 |
0 |
-1 |
0 |
0 |
1 |
0 |
0 |
0 |
-1 |
|
2 |
х12 |
40 |
0 |
-1 |
0 |
0 |
0 |
-1 |
0 |
0 |
1 |
0 |
1 |
1 |
0 |
0 |
1 |
0 |
-1 |
0 |
|
4 |
х1 |
70 |
1 |
0 |
1 |
0 |
0 |
-1 |
0 |
-1 |
1 |
0 |
1 |
0 |
0 |
-1 |
0 |
1 |
0 |
1 |
|
3 |
х10 |
100 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
|
1 |
х7 |
110 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
|
∆0 = 950 |
∆1= 0 |
∆2= -1 |
∆3= 0 |
∆4= 0 |
∆5=0 |
∆6= -1 |
∆7=0 |
∆8= -4 |
∆9= -8 |
∆10=0 |
∆11= -7 |
∆12=0 |
∆13=-51 |
∆14= -52 |
∆15=-54 |
∆16= -57 |
∆17= -55 |
∆18= -59 |
||
Таблиця 53
Оптимальний план перевезень вантажу у вигляді ТТ
|
|
B1 |
B2 |
B3 |
B4 |
Запаси ai |
|
A1 |
c1 = 4 x1=70
|
c2 = 7 x2=0
|
c3 = 2 x3=0
|
c4 = 5 x4=30
|
100 |
|
A2 |
c5 = 3 x5=10
|
c6 = 6 x6=0
|
c7 = 1 x7=110
|
c8 = 8 x8=0
|
120 |
|
A3 |
c9 = 9 x9=0
|
c10 = 3 x10=100 |
c11 = 6 x11=0
|
c12 = 2 x12=40
|
140 |
|
Заявки bj |
80 |
100 |
110 |
70 |
360 |
Нижче показаний фрагмент роботи програми (її текст на алгоритмічної мові Delphi представлений у додатку 16), яка реалізує рішення ТЗ для нашого прикладу симплексним методом. Зокрема на рис. 2. представлена діалогова форма по уведенню розмірності ТЗ, приведенню ТЗ до загальної задачі лінійного програмування, уведенню першої СТ і виконанню відповідних розрахунків нульової ітерації, а на рис. 3 – остання результуюча форма, що містить дані останньої СТ.
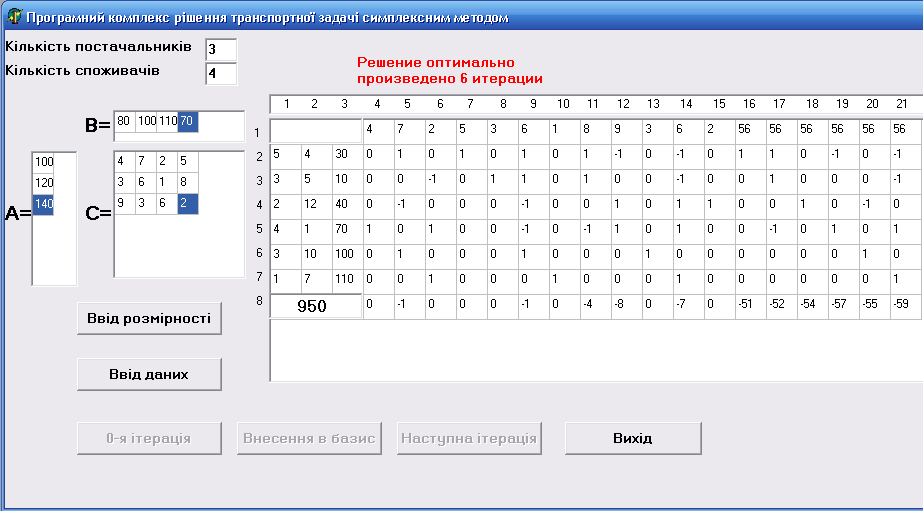
Рис. 2. Перша СТ
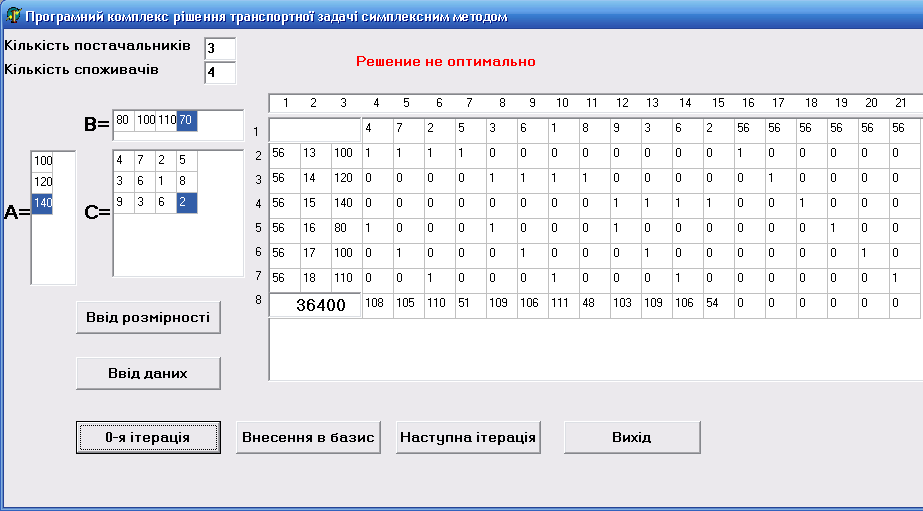
Рис. 3. Остання СТ
2. Розподільний метод оптимізації транспортних перевезень
Процес пошуку оптимального плану перевезень розподільним методом транспортної задачі розглянемо на конкретному прикладі. Нехай опорний план, отриманий за допомогою методу північно-західного кута, є такий, що наведено в таблиці 54. (Особливо відзначимо, що цей план не вироджений, тобто кількість перевезень вантажу дорівнює m+n+1. Ця обставина для розподільного методу має істотне значення, на чому ми зупинимося пізніше).
Таблиця 54
Вихідна ТТ
|
|
B1 |
B2 |
B3 |
B4 |
Запасиai |
|
A1 |
4 80
|
7 20
|
2
|
5
|
100 |
|
A2 |
3
|
6
8
|
1
+
|
8
|
120 |
|
A3 |
9
|
3
+
|
6 70
|
2 70
|
140 |
|
Заявки bj |
80 |
100 |
110 |
70 |
360 |
 0
0

 40
40
Після
складання опорного плану стає питання,
чи є цей план перевезень оптимальним ?
Скоріше за все ні, тому що ми не звертали
уваги на існуючі вартості перевезень
одиниці вантажу від
![]() до
до
![]() ,
що значно відрізняються одна від одної.
,
що значно відрізняються одна від одної.
Простежимо, як буде змінюватися план перевезень (якщо він не є оптимальним) з оцінкою кожного разу поточного значення загальної вартості перевезень. Імовірніше усього, що ця вартість має поступово зменшуватися за рахунок поліпшення плану перевезень, а спочатку вона становить:
![]()
Перевіряємо,
чи зміниться в бік зменшення вартості
план перевезень, якщо почергово робити
спробу перемістити одиницю вантажу в
кожну незайняту
клітинку. В
цьому випадку кожну незайняту клітинку
помістимо у вершину контуру, в інших
вершинах якого розташовані зайняті
клітинки. Наприклад, для незайнятої
клітинки
![]() таким контуром буде:
таким контуром буде:
![]() .
.
Для
кожного такого контуру знаходимо
вартісну характеристику переміщення
одиниці вантажу в незайняту клітинку
(![]() ),
не змінюючи баланс сум перевезень в
рядках та стовпчиках. Для переміщення,
наприклад, 1 одиниці вантажу (о.в.)
в
),
не змінюючи баланс сум перевезень в
рядках та стовпчиках. Для переміщення,
наприклад, 1 одиниці вантажу (о.в.)
в
![]() отримуємо збільшення вартості на
отримуємо збільшення вартості на
![]() у.г.о.,
але для збереження балансу вантажів в
рядках і стовпчиках транспортної таблиці
зменшуємо на 1 о.в.
в клітинці
у.г.о.,
але для збереження балансу вантажів в
рядках і стовпчиках транспортної таблиці
зменшуємо на 1 о.в.
в клітинці
![]() ,
що викличе зменшення вартості перевезень
на
,
що викличе зменшення вартості перевезень
на
![]() у.г.о..
Оскільки
у.г.о..
Оскільки
![]() зменшується на 1 о.в.,
додамо в клітинку
зменшується на 1 о.в.,
додамо в клітинку
![]() також 1 о.в.,
що викличе збільшення вартості перевезення
на
також 1 о.в.,
що викличе збільшення вартості перевезення
на
![]() .
Однак збільшення
.
Однак збільшення
![]() на 1 о.в.
повинно призвести до зменшення
на 1 о.в.
повинно призвести до зменшення
![]() на 1 о.в.,
тобто до зменшення вартості перевезень
на
на 1 о.в.,
тобто до зменшення вартості перевезень
на
![]() .
Це зменшення
.
Це зменшення
![]() буде скомпенсоване раніше проведеним
додаванням 1 о.в.
в незайняту клітинку
буде скомпенсоване раніше проведеним
додаванням 1 о.в.
в незайняту клітинку
![]() .
Таким чином, додавання 1 о.в.
в незайняту клітинку
.
Таким чином, додавання 1 о.в.
в незайняту клітинку
![]() призведе до зміни вартості на величину
вартісної характеристики :
призведе до зміни вартості на величину
вартісної характеристики :
![]()
Іншими
словами, переміщення одиниці вантажу
(або будь-якого об’єму) по контуру
![]() не викличе зміни вартості перевезень,
тобто така модернізація початкового
плану недоцільна. Відзначимо, що для
незайнятої клітинки cij
приймається завжди зі знаком “+”, потім
за мірою просування по контуру (або в
одну, або в іншу сторону – напрям
проходження контуру не має значення)
cij
приймають послідовно знаки “–” потім
“+”.
не викличе зміни вартості перевезень,
тобто така модернізація початкового
плану недоцільна. Відзначимо, що для
незайнятої клітинки cij
приймається завжди зі знаком “+”, потім
за мірою просування по контуру (або в
одну, або в іншу сторону – напрям
проходження контуру не має значення)
cij
приймають послідовно знаки “–” потім
“+”.
Очевидно,
що якщо отримане значення
![]() для ij-ї
незайнятої клітинки буде від’ємним,
то це свідчить про те, що переміщення
вантажу в цю точку знижують загальну
вартість перевезень, якщо ж
для ij-ї
незайнятої клітинки буде від’ємним,
то це свідчить про те, що переміщення
вантажу в цю точку знижують загальну
вартість перевезень, якщо ж
![]() ,
то переміщення в цю точку збільшується
вартість перевезень; якщо
,
то переміщення в цю точку збільшується
вартість перевезень; якщо
![]() ,
то вартість перевезень не змінюється.
,
то вартість перевезень не змінюється.
Визначаємо
![]() для всіх незайнятих клітинок:
для всіх незайнятих клітинок:
![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
;
![]() ;
; ![]() .
.
Таким
чином, доцільно перерозподілити обсяги
перевезень базового плану по контуру
![]() з метою завантаження клітинки
з метою завантаження клітинки
![]() ,
яка має
,
яка має
![]() .
Будуємо цей контур з виказанням знаків,
що послідовно міняються і позначають
додавання або зменшення об’ємів
перевезень по даному контуру (див. табл.
54).
.
Будуємо цей контур з виказанням знаків,
що послідовно міняються і позначають
додавання або зменшення об’ємів
перевезень по даному контуру (див. табл.
54).
Об’єм
вантажу, що переміщається, визначається
як мінімальний
з негативних об’ємів по даному контуру
(![]() ).
Таким чином, переміщення вантажу
).
Таким чином, переміщення вантажу
![]() по даному контуру дозволить максимально
завантажити клітинку
по даному контуру дозволить максимально
завантажити клітинку
![]() і повністю розвантажити клітинку
і повністю розвантажити клітинку
![]() .
Очевидно, що при цьому
.
Очевидно, що при цьому
![]() стане рівним (80 – 70) = 10, а
стане рівним (80 – 70) = 10, а
![]() стане рівним (40 + 70) = 110. Інші значення
для даного контуру
стане рівним (40 + 70) = 110. Інші значення
для даного контуру
![]() ;
;
![]() .
.
Очевидно, що загальна вартість перевезень повинна при цьому змінитися на:
![]()
і має бути рівною
![]()
Щоб перевірити скоректований план на оптимальність, будуємо таблицю 55, що аналогічна таблиці 54 для отримання нового плану, і знову перевіряємо його на оптимальність за допомогою вартісних характеристик незайнятих клітинок.
Для отриманого плану перевезень маємо:
![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
;
![]() ;
; ![]() .
.
Таблиця 55