

Содержание
1 Задание на курсовой проект 2
2 Кинематическое исследование механизма 3
2.1 Структурный анализ механизма 3
2.2 Построение плана положений механизма 7
2.3 Аналитический расчет скоростей и ускорений 9
2.4 Построение плана скоростей 14
2.5 Построение плана ускорений 15
3 Силовой анализ 18
1 Задание на курсовой проект

Рисунок 1.1 – Схема механизма
Таблица 1.1 - Параметры
|
Параметры |
Обозначения |
Единица |
Числовые значения |
|
Размеры звеньев |
lOA |
м |
0.1 |
|
lAB |
м |
0.35 |
|
|
lLB |
м |
0.24 |
|
|
lOL |
М |
0.32 |
|
|
lLD |
М |
0.4 |
|
|
lCK |
М |
0.3 |
|
|
a |
М |
0.28 |
|
|
Число оборотов кривошипа |
ω1 |
c-1 |
6 |
|
Диаметр поршня |
DП |
М |
0.2 |
|
Давление |
Р |
Атм |
6 |
2 Кинематическое исследование механизма
2.1 Структурный анализ механизма
Исследуемый механизм, кинематическая схема, которого приведена на рис. 1.1, а исходные данные указаны в таблице 1.1, служит для преобразования вращательного движения кривошипа 1 (входное звено) в поступательное движение ползуна 5 (выходное звено).

Рисунок 2. 1 – Кинематическая схема механизма
Определяем степень подвижности механизма по формуле:
![]() ,
,
где, р – число кинематических пар;
n – число подвижных звеньев.
Итак,
![]()
Так как W=1 то у механизма одно входное звено.
Механизм состоит из 5 звеньев:
0-стояк;
1-кривошип;
2-шатун;
3-кулиса;
4-камень кулисы;
5-ползун.
О(0-1)-кинематическая пара, вращение;
А(1-2) - кинематическая пара, вращение;
B(2-3) - кинематическая пара, вращение;
L(3-0) - кинематическая пара, вращение;
C3(3-4) - кинематическая пара, вращение;
C5(5-4) - кинематическая пара, поступательное движение.
Механизм образован присоединением к стояку 0 кривошипа, который образует с ним вращательную пару (т.О). Кривошип 1 делает вращательное движение вокруг неподвижного стояка. Шатун 2 совершает сложное плоскопараллельное движение и присоединен к кривошипу 1 (т.А).
Кулиса 3 присоединено к шатуну 2, образуя с ним вращательную кинематическую пару (т.В). Кулиса 3 осуществляет колебательное движение вокруг неподвижного стояка. К кулисе 3 присоединяется камень кулисы 4, образовывая вращательную кинематическую пару (точка С).
К камню кулисы 4 присоединен ползун 5 присоединен к коромыслу 3 образуя с ним вращательную кинематическую пару (т.С5). Ползун 5 осуществляет поступательное движение вдоль направляющей, образуя с ней двигаться кинематическую пару (т.К).
Разбиваем механизм на группы Асура и определяем их классы, порядки и виды:
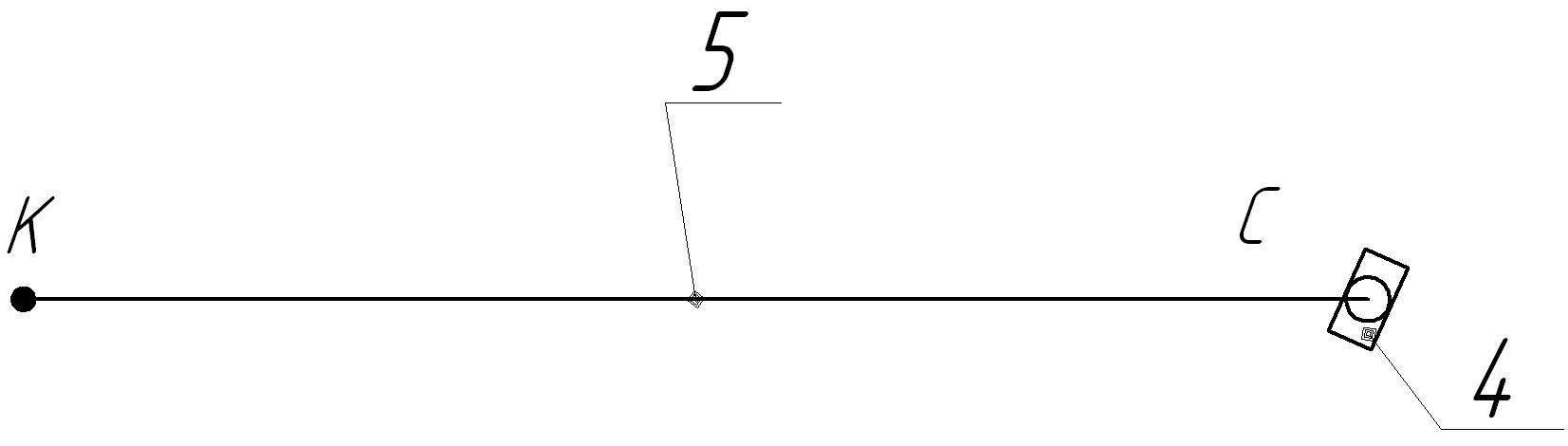
Рисунок 2.2 – Структурная группа 4-5
W=3n-2p=3*2-2*3=0
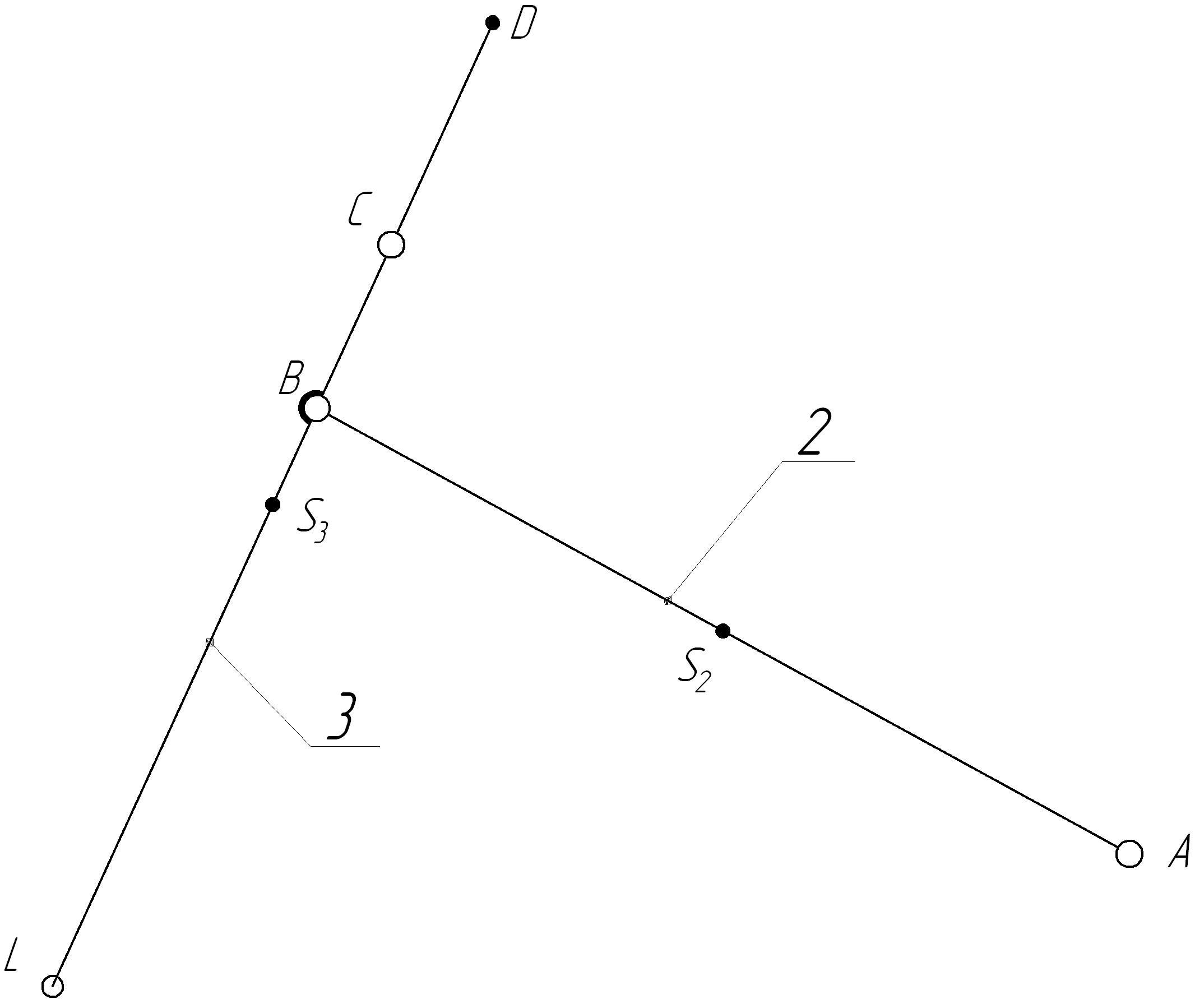
Рисунок 2.3 – Структурная группа 2-3
W=3n-2p=3*2-2*3=0

Рисунок 2.4 Начальный механизм.
W=3n-2p=3*1-2*1=1

Рисунок 2.5 Обобщенный вид структурных групп и структурный граф механизма.