

1 Дайте определение понятию «электропривод», приведите и поясните общую структурную схему электропривода.
Электроприводом (ЭП) называется электромеханическая система, состоящая из электродвигательного, передаточного, преобразовательного и управляющего устройств, предназначенная для приведения в движение исполнительных органов рабочих машин и управления этим движением.

ЭЭ — электрическая энергия
МЭ — механическая энергия
Uд.с. — дополнительные сигналы
Uy — сигнал управления
Рисунок 1 – Общая структурная схема электропривода
Основным элементом любого электропривода (6) является электродвигатель (1). От электродвигателя механическая энергия (МЭ) через передаточное устройство (7) (механическое, гидравлическое, электромагнитное) подается на исполнительный орган рабочей машины (8), за счет чего он совершает механические движения. Функция передаточного устройства заключается в согласовании движений электродвигателя и исполнительного органа. Электроэнергия (ЭЭ) потребляется двигателем от источника электрической энергии (3). Для получения электрической энергии необходимых для двигателя параметров между двигателем и источником включается силовой преобразователь (2), который вместе с маломощным блоком управления (4) образует систему управления (5).
2 Напишите и поясните основное уравнение движения электропривода.
В общем случае моменты двигателя М и нагрузки МС могут быть как положительными, так и отрицательными. Если направление действия момента совпадает с направлением скорости, то такой момент считается положительным и наоборот. Момент нагрузки МС также называется статическим моментом или моментом сопротивления. По характеру действия статические моменты делятся на активные и реактивные.
Активные - это моменты, обусловленные внешними по отношению к двигателю источниками энергии (сила тяжести, сила ветра и т. д.). Эти моменты действуют независимо от направления вращения электропривода, т. е. при одном направлении движения они могут быть движущими, при другом – тормозящими.
Реактивные моменты являются тормозными (обусловленными в основном силами трения). Они всегда противодействуют движению и поэтому изменяют свое направление при изменении направления движения.
Основное уравнение движения ЭП устанавливает связь между соотношением моментов двигателя и нагрузки и скоростью ЭП:
![]() ,
,
где МДИН – динамический момент в электроприводе.
1. М > MC, Mдин > 0, ω - увеличивается
2. M < MC, Mдин < 0, ω – уменьшается
3. М = МС, Мдин = 0,
3.1 ωнач = 0, ω = 0
3.2 ωнач > 0, ω = const
3 Приведите схему включения двигателя постоянного тока независимого возбуждения. Приведите формулы и графики механической и электромеханической характеристик этого двигателя.
На рисунке 2.1.а приведена схема включения ДПТ независимого возбуждения.
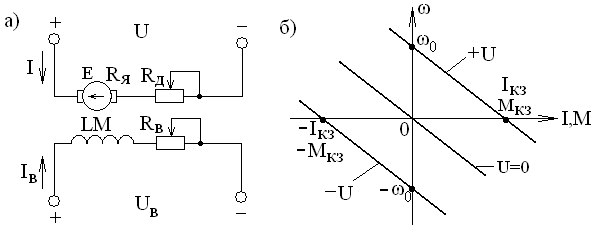
Рисунок 2.1 – Схема включения(а) и статические характеристики(б) ДПТ НВ
На схеме приняты следующие обозначения: U – напряжение на якоре, В; UВ – напряжение на обмотке возбуждения, В; I – ток якоря, А; IВ– ток возбуждения, А; RД – добавочное сопротивление в цепи якоря, Ом; RВ – добавочное сопротивление в цепи обмотки возбуждения, Ом; Rя – сопротивление якоря, Ом.
Rя = 1,25(rоя + rдп) + rко + rщ.
rоя – сопротивление обмотки якоря.
rдп – сопротивление добавочных полюсов.
rко – сопротивление компенсационной обмотки.
rщ – сопротивление щёточного контакта.
Коэффициент 1,25 перед скобкой в данной формуле учитывает увеличение сопротивления обмоток ДПТ при нагревании.
![]() (3)
(3)
Такая зависимость ω = f(I) называется электромеханической или скоростной характеристикой ДПТ НВ.
![]() (5)
(5)
Такая зависимость ω = f(М) называется механической характеристикой ДПТ НВ.
Электромеханические и механические характеристики ДПТ НВ представляют собой линейные зависимости угловой скорости от тока и момента, вид которых для разных полярностей питающего напряжения якоря приведён на рисунке 2.1.б. Эти характеристики совмещены, что справедливо в случае kФ = const.