

Исходные данные:
|
Вариант: 1-препоследняя цифра номера зачетки 2-последняя цифра номера зачетки Задания: 1(А): град ГКК1=357 град V1=12 уз ГКК2=186 град V2=13уз A=-0.0013 c/м С=0,00334 с/м градVN=-12,85 м/с wd=0.001342 м/с 1(Б): град ГКК1=357 град V=6.17м/с ГКК2=186 град N=-0.06464с/м m=0.02565с M=0.06841с/м h=0.000388с/м wd=0.00098 c град 2.1:L=18.9 миль А12=78град град V1=12уз V2=13уз ГКП1=191,5 град ГКП2=124,6 град |
|||||||||||||||||||||||||||||||||||||||
|
2.2:град V1=12уз V2=13уз V’1=17уз V’2=8уз ГКК’1=171град ГКК‘2=351град 2.3:(А)
(Б)
Vи3=15,1уз ΔV1=-0.47уз ΔV2=-0.77уз ΔV3=-0.04уз 5:t°C=4,9 °C S‰=25‰ hизм=130 метров =11 град
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
СОДЕРЖАНИЕ
1. Расчет суммарной инерционной погрешности гирокомпасов (стр. 3-10)
Задание 1 (А) (стр. 4-6)
Задание 1 (Б) (стр. 7-9)
2. Оценка влияния погрешностей гирокомпаса на точность судовождения (стр. 10-19)
2.1 Оценка возможной погрешности определения места судна (стр. 10-14)
Задание 2.1 (А) (стр. 11)
Задание 2.1 (Б) (стр. 12-14)
2.2 Оценка погрешностей определения поправки гирокомпаса (стр. 15-17)
Задание 2.2 (А) (стр. 16)
Задание 2.2 (Б) (стр. 17)
2.3 Оценка возможной величины поперечного смещения судна (стр. 18-19)
Задание 2.3 (А) (стр. 18)
Задание 2.3 (Б) (стр. 19)
3. Расчет остаточной девиации магнитного компаса (стр. 20-23)
Задание 3 (стр. 21-23)
4. Расчет установочных данных для корректора индукционного лага (стр. 24-29)
Задание 4 (стр. 25-29)
5. Расчет поправок эхолота (стр. 30-31)
Задание 5 (стр. 31)
6. Функциональная схема эхолота НЭЛ М-3Б в режиме самописца,основные регулировки (стр. 32-34)
7. Список литературы (стр. 35)
-
Расчет суммарной инерционной погрешности гирокомпасов "Курс-4" и "Вега"
В настоящее время большинствосудов мирового итранспортного флота оснащены гироскопическими компасами, в конструкции которых предусмотрены какие-либо устройства для вычисления и исключения инертной девиации, возникающая при маневрировании судна. К указанным компасам относятся два основных курсоуказателя, применяемые на судах - гирокомпасы “Курс-4” и “Вега”. По этой причине судоводителю следует считаться с тем, что показания гирокомпаса в процессе маневра и в течение некоторого времени после его окончания будут содержать погрешности.
С целью снижения влияния возникающих инерционных девиаций на точность в безопасности судовождения, необходимо принимать в расчет следующее:
-
факт существования инерционной девиации и поперечного смещения в результате маневрирования судна;
-
качественную картину их развития во времени в различных широтах плавания;
-
ориентировочную численную оценку возможной величины девиации и поперечного смещения, особенно их экстремальные значения.
Задание 1 (а)
Произвести расчет и построение кривой суммарной инерционной погрешности гирокомпаса “Курс-4”, возникающей в результате маневрирования.
Исходные условия: в широте судна производит маневр изменением
скорости и курса; при этом ГКК1, V1, ГКК2и V2 - курс и скорость судна соответственно до и после маневра.
Расчет суммарной инерционной погрешности производится по формуле:
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|||||||||
|
VN |
изменение северной составляющей скорости судна |
м/с |
|||||||||||||
|
Wd |
частота затухающих колебаний гиросферы |
|
1/с |
||||||||||||
|
h |
коэффициент затухания |
|
|
1/с |
|||||||||||
|
m |
коэффициент апериодического члена |
|
1/с |
||||||||||||
|
A, C |
постоянные интегрирования |
|
|
с/м |
|||||||||||
|
|
начальная фаза |
|
|
|
Град |
||||||||||
Таблица 1 Зависимость параметров от широты
|
|
|
|
10 |
20 |
30 |
40 |
50 |
60 |
70 |
80 |
|
m |
*10-4 |
7,276 |
7,33 |
7,391 |
7,563 |
7,852 |
8,312 |
9,245 |
10,65 |
12,76 |
|
h |
*10-4 |
3,862 |
3,835 |
3,805 |
3,718 |
3,575 |
3,344 |
2,878 |
2,175 |
1,12 |
|
Wd |
*10-4 |
14,64 |
14,54 |
14,11 |
13,42 |
12,39 |
11,05 |
9,279 |
7,213 |
4,807 |
|
m= |
-0,0007563 |
1/c |
|
Wd= |
0,001342 |
1/c |
|
h= |
-0,0003718 |
1/c |
C=0.00333542 |
|||
|
|
|
|
|
|||
Используя значения DVN,A,C,Y, а также данные из табл. 1 рассчитаем суммарную инерционную погрешность гирокомпаса "Курс-4" в интервале времени от t=0 до t=7200 c шагом 180 с. Результаты расчетов представим в виде таблицы 2 и рис. 1.
Таблица 2 Результаты расчета j
|
t |
0 |
180 |
360 |
540 |
720 |
900 |
1080 |
1260 |
1440 |
1620 |
|
j |
1,92 |
1,20 |
0,55 |
0,00 |
-0,45 |
-0,78 |
-1,00 |
-1,11 |
-1,11 |
-1,04 |
|
t |
1800 |
1980 |
2160 |
2340 |
2520 |
2700 |
2880 |
3060 |
3240 |
3420 |
|
j |
-0,89 |
-0,70 |
-0,47 |
-0,24 |
-0,01 |
0,20 |
0,37 |
0,52 |
0,61 |
0,67 |
|
t |
3600 |
3780 |
3960 |
4140 |
4320 |
4500 |
4680 |
4860 |
5040 |
5220 |
|
j |
0,68 |
0,66 |
0,60 |
0,52 |
0,42 |
0,31 |
0,20 |
0,09 |
-0,01 |
-0,09 |
|
t |
5400 |
5580 |
5760 |
5940 |
6120 |
6300 |
6480 |
6660 |
6840 |
7020 |
|
j |
-0,16 |
-0,21 |
-0,24 |
-0,25 |
-0,24 |
-0,22 |
-0,19 |
-0,15 |
-0,11 |
-0,07 |
|
t |
7200 |
|||||||||
|
j |
-0,02 |
|||||||||
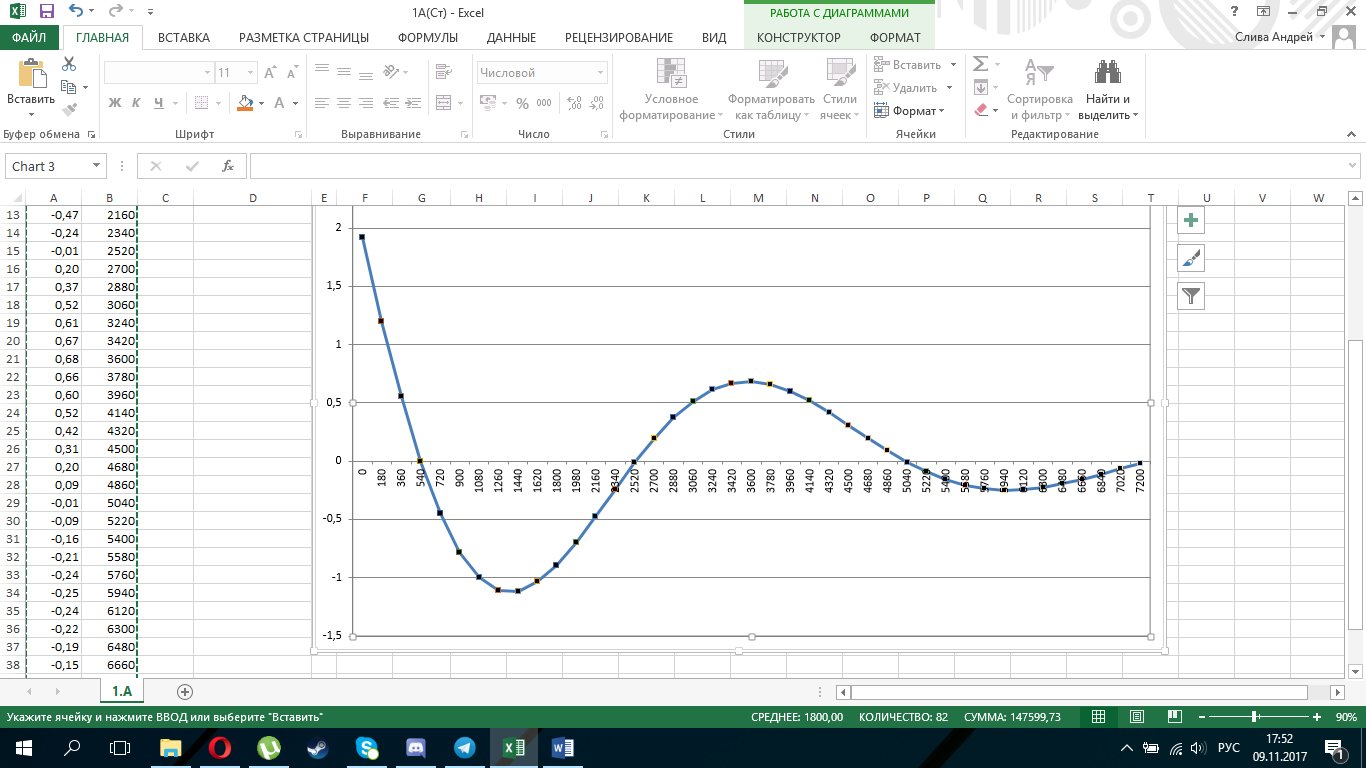
Рис 1.