

4.4. Апроксимація перехідних характеристик.
Апроксимація – це наближений опис графічних залежностей математичними функціями.
Графічне подання перехідних характеристик повністю відображає динамічні властивості об`єкта керування, але не зручно для практичного використання. Перехідні характеристики об`єктів керування апроксимують передаточними функціями чи диференціальними рівняннями. При апроксимації перехідних характеристик приймають певні припущення. Основним є припущення що об`єкт є лінійним.
Під час апроксимації перехідних характеристик бажано отримати максимально просту апроксимуючу залежність, що відображає динамічні властивості експериментальної характеристики із заданою точністю. Для однієї і тієї ж перехідної характеристики можуть бути отримані різні передаточні функції чи диференційні рівняння. Перевірка точності апроксимації проводиться шляхом порівняння графіків експериментальної перехідної характеристики ї характеристики отриманої при розв`язуванні апроксимуючого виразу. Якщо експериментальна і розрахункова характеристики співпадають із заданою точністю, то апроксимацію вважають закінченою. В іншому випадку вибирають більш складний вираз апроксимуючої функції.
5 ЗГЛАДЖУВАННЯ ЕКСПЕРИМЕНТАЛЬНИХ ДАНИХ
При досліджені динамічних характеристик промислових об`єктів на останні діють невраховані збурення. Таким чином експериментальна перехідна характеристика z(t) складається із корисного сигналу h(t) і сигналу завад f(t).
Z(t) = h(t) + f(t) (5.1)
Вид такої характеристики наведено на рис. 5.1

Рисунок 5.1 Перехідна характеристика з завадами.
Для
виділення корисного сигналу із
експериментальної характеристики
використовують різні методи згладжування
найбільш простий серед яких метод
послідовного усереднення. Метод полягає
в тому, що на деякому інтервалі часу
![]() (
L – ціле число, краще парне) виконують
послідовне усереднення ординат
(
L – ціле число, краще парне) виконують
послідовне усереднення ординат
![]() за
використанням наступного алгоритму:
за
використанням наступного алгоритму:
![]()
де
![]() -
ординати усередненої характеристики;
-
ординати усередненої характеристики;
![]() -
ордината експериментально отриманої
точки; i – порядковий номер точки.
-
ордината експериментально отриманої
точки; i – порядковий номер точки.
Точність
усереднення залежить від числа L. При
малому значенні L якість згладжування
буде низькою. Збільшення L може призвести
до викривлення суттєвих особливостей
часової характеристики. Спочатку
обирають L = 2 і візуально оцінюють
![]() (t)
і, в разі потреби, збільшують значення
L до 4.
(t)
і, в разі потреби, збільшують значення
L до 4.
Якщо L = 2, то усереднення проводять по трьом точкам за такими формулами:
 (5.2)
(5.2)
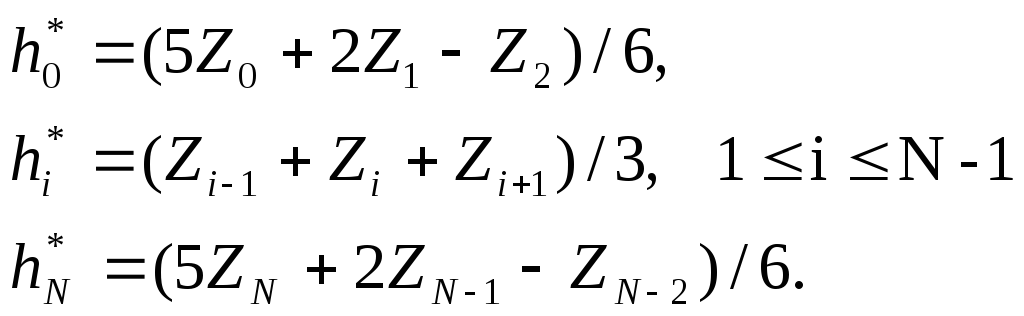
Якщо L=4, то усереднення проводять по п’яти точкам за такими формулами:
 (5.3)
(5.3)
На рис. 5.2 наведено результати згладження перехідної характеристики.

5.12. Сглаживание при помощи встроенных функций MathCAD
Ряд функций MathCAD предназначен для выполнения операций сглаживания данных различными методами (в их названии имеется слово smooth - гладкий). Перечень этих функций:
medsmooth(VY, n) - для вектора с m действительными числами возвращает m-мерный вектор сглаженных данных по методу скользящей медианы, параметр n задает ширину окна сглаживания (n должно быть нечетным числом, меньшим m);
k smooth(VX,
VY,
b)
- возвращает n-мерный
вектор сглаженных VY,
вычисленных на основе распределения
Гаусса. VX
и VY
- n-мерные
векторы действительных чисел. Параметр
b
(полоса пропускания) задает ширину окна
сглаживания (b
должно в несколько раз превышать интервал
между точками по оси х);
smooth(VX,
VY,
b)
- возвращает n-мерный
вектор сглаженных VY,
вычисленных на основе распределения
Гаусса. VX
и VY
- n-мерные
векторы действительных чисел. Параметр
b
(полоса пропускания) задает ширину окна
сглаживания (b
должно в несколько раз превышать интервал
между точками по оси х);

supsmooth(VX, VY) - возвращает n-мерный вектор сглаженных VY, вычисленных на основе использования процедуры линейного сглаживания методом наименьших квадратов. Элементы вектора VX должны идти в порядке возрастания.