

Нормальное ускорение
Нормальное
ускорение – это составляющая
вектора ускорения, направленная вдоль
нормали к траектории движения в данной
точке на траектории движения тела. То
есть вектор нормального ускорения
перпендикулярен линейной скорости
движения (см. рис. 1.10). Нормальное ускорение
характеризует изменение скорости по
направлению и обозначается буквой
![]() n.
Вектор нормального ускорения направлен
по радиусу кривизны траектории.
n.
Вектор нормального ускорения направлен
по радиусу кривизны траектории.
Полное ускорение
Полное ускорение при криволинейном движении складывается из тангенциального и нормального ускорений по правилу сложения векторов и определяется формулой:
(согласно теореме Пифагора для прямоугольно прямоугольника).
Направление полного ускорения также определяется правилом сложения векторов:
![]() =
=
![]() τ
+
τ
+
![]() n
n
4. Равномерное движение по окружности.
Среди различных видов криволинейного движения особый интерес представляет равномерное движение тела по окружности. Это самый простой вид криволинейного движения. Вместе с тем любое сложное криволинейное движение тела на достаточно малом участке его траектории можно приближенно рассматривать как равномерное движение по окружности.
Центростремительное
ускорение.
При равномерном движении по окружности
значение скорости остается постоянным,
а направление вектора скорости
![]() изменяется
в процессе движения. Определим ускорение
тела, движущегося равномерно по окружности
радиусом R.
За интервал времени Δt
тело проходит путь
изменяется
в процессе движения. Определим ускорение
тела, движущегося равномерно по окружности
радиусом R.
За интервал времени Δt
тело проходит путь
![]() .
.
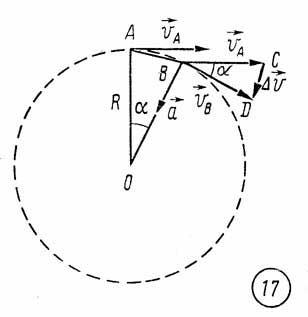
Этот
путь Δs
равен длине дуги АВ
(рис. 17). Векторы
скоростей
![]() и
и
![]() точках
А
и В
направлены по касательным к окружности
в этих точках, угол α между векторами
точках
А
и В
направлены по касательным к окружности
в этих точках, угол α между векторами
![]() и
и
![]() равен
углу между радиусами ОА
и OB.
равен
углу между радиусами ОА
и OB.
Для
нахождения вектора ускорения
![]() нужно
найти разность векторов скорости
нужно
найти разность векторов скорости
![]() и
определить отношение изменения скорости
к малому интервалу времени Δt,
за который произошло это изменение:
и
определить отношение изменения скорости
к малому интервалу времени Δt,
за который произошло это изменение:
![]() .
.
Из подобия треугольников ОАВ и BCD следует
![]() .(3.1)
.(3.1)
Если
интервал времени Δt
мал, то мал и угол α. При малых значениях
угла α длина хорды АВ
примерно равна длине дуги АВ,
т. е.
![]() .
Так как
.
Так как
![]() ,
,
![]() и
и
![]() ,
то из выражения (3.1) получаем
,
то из выражения (3.1) получаем
![]() ,(3.2)
,(3.2)
![]() .
(3.3)
.
(3.3)
Поскольку
![]() ,
(3.4)
,
(3.4)
из выражений (3.3) и (3.4) получаем
![]() .
(3.5)
.
(3.5)
Из
рисунка 17 видно, что, чем меньше угол α,
тем ближе направление вектора
![]() к
направлению на центр окружности. Так
как вектор ускорения равен
к
направлению на центр окружности. Так
как вектор ускорения равен
![]() отношению
вектора
отношению
вектора
![]() к
интервалу времени Δt
при условии, что интервал времени Δt
очень мал, то вектор ускорения при
равномерном движении по окружности
направлен к ее центру.
к
интервалу времени Δt
при условии, что интервал времени Δt
очень мал, то вектор ускорения при
равномерном движении по окружности
направлен к ее центру.
При изменении положения тела на окружности меняется направление на центр окружности. Следовательно, при равномерном движении тела по окружности модуль ускорения имеет постоянное значение, но направление вектора ускорения изменяется со временем. Ускорение при равномерном движении по окружности называется центростремительным ускорением.
5. Законы Ньютона.
Зако́ны Ньюто́на — три закона, лежащие в основе классической механики и позволяющие записать уравнения движения для любой механической системы, если известны силовые взаимодействия для составляющих её тел. Впервые в полной мере сформулированы Исааком Ньютоном в книге «Математические начала натуральной философии»