

-
Вибір електродвигуна, кінематичний та силовий розрахунки механічного приводу
-
Вибір електродвигуна за потужністю
Розрахунок приводу машини починається з вибору потужності електродвигуна та його частоти обертання, визначення загального передатного числа та розбивання його за ступенями.
Електродвигун для приводу вибирають за споживаною потужністю на вихідному валу приводу з урахуванням усіх втрат в кінематичних ланцюгах приводу. В загальному вигляді потужність Рд.сп , що споживається від електродвигуна, з урахуванням цих втрат, визначається за формулою
Рд.сп= ,
,
де q – кількість потоків потужності; Pi – потужність і–го потоку на виході приводу, кВт; 𝛈заг.і – загальний ККД кінематичного ланцюга приводу і–го потоку потужності, який визначається за формулою
𝛈заг.і= 𝛈1𝛈2…𝛈к ,
де 𝛈1, 𝛈2, …𝛈к – ККД окремих ланок кінематичного ланцюга приводу і–го потоку потужності.
Для однопотокового приводу споживана потужність електродвигуна при q=1 буде:
Рд.сп=
 заг=
заг= м.в·
м.в· кл.п
кл.п
 кн.п
кн.п
де P
- вихідна потужність приводу , заг.–
загальний ККД відповідного кінематичного
ланцюга приводу
заг.–
загальний ККД відповідного кінематичного
ланцюга приводу
 заг
=0,95·0,96·0,97=0,89
заг
=0,95·0,96·0,97=0,89
Рд.сп
= =
5,61 кВт;
=
5,61 кВт;
Обираємо
номінальну потужність електродвигуна
керуючись умовою Рн Рд.сп.
Отже обираємо двигун з потужністю 7,5
кВт, оскільки перенавантаження складає
менше 5%.
Рд.сп.
Отже обираємо двигун з потужністю 7,5
кВт, оскільки перенавантаження складає
менше 5%.
1.2. Кінематичний розрахунок приводу.
Визначення загального передатного числа
та вибір електродвигуна за частотою обертання
Визначимо мінімальну та максимальну частоту обертання двигуна, відповідно при можливому мінімальному та максимальному значенню передатного числа пасової передачі:
umin= umin1 · umin1=2,5·2=5;
umax= umax1 · umax1=4,5·5=22,5.
Ũ=730/n=2,53 ;
Ũ=970/n=3,34;
Ũ=1455/n=5,01;
Ũ=2900/n=10;
Отже, вибираємо двигун частота
обертання якого буде найбільш точно
відповідати даному інтервалу. В результаті
обираємо електродвигун з nн=2900
 з U=10 , технічні характеристики та
габаритні розміри якого занесені до
таблиці 1.1 та таблиці 1.2 відповідно.
з U=10 , технічні характеристики та
габаритні розміри якого занесені до
таблиці 1.1 та таблиці 1.2 відповідно.
Таблиця 1.1 Основні технічні характеристики асинхронних двигунів серії 4А за ГОСТ 19523-81
|
Номінальна потужність, Рн, кВт |
Тип двигуна |
Частота обертання nд, хв-1 |
|
|
ККД, % |
cosφ |
|
Синхронна частота обертання 1500 хв-1 |
||||||
|
11 |
4А112M2Y3 |
2900 |
2,2 |
2 |
87,5 |
0,88 |


Таблиця1.2. Основні розміри, мм ,асинхронних трифазних двигунів серії 4А за ГОСТ 19523-81
|
Тип двигуна |
Число полюсів |
Габаритні розміри,мм |
Установлювані та приєднувані розміри, мм |
Маса, кг |
||||||||
|
l30 |
h31 |
d30 |
l1 |
l10 |
d1 |
b10 |
h |
hs |
|
|||
|
4A132M |
|
452 |
310 |
260 |
80 |
140 |
32 |
190 |
112 |
35 |
56 |
|
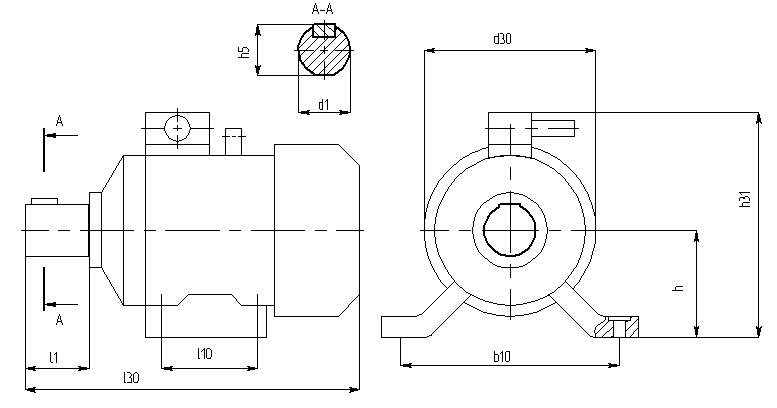
 Рис.1.1
Ескіз двигуна
Рис.1.1
Ескіз двигуна
Після цього визначаємо загальне дійсне
передатне число приводу і
пасової передачі :
Uзаг

