

9.14. Потери, связанные с работой оператора
Потери за счет оператора в общем случае зависят от его опыта, тренированности, состояния нервной системы, умения сосредоточиться и т. д. Минимальное значение коэффициента потерь за счёт оператора при съёме с яркостного индикатора составляем Lоп = 1,5дБ. Эти потери обусловлены тем, что оператор реагирует не на пиковое, а па среднее значение яркости отметки (человеческий глаз имеет тенденцию усреднять яркость).
Для нормальных условий работы оператора за индикатором типа ИКО необходимо иметь относительно слабое внешнее освещение. Источники света располагают так, чтобы они не могли создавать отражений от экрана ЭЛТ в пределах угла обзора оператора. Кроме того, во избежание ухудшения темповой адаптации источники света размещают так, чтобы в поле зрения оператора не могли попасть яркие источники света пли ярко освещенные поверхности. Слабое освещение порядка следует предпочесть полной темноте. При этом уменьшаются утомляемость и напряжение зрения оператора, кроме того, допускается более высокий уровень акустического шума и более эффективно осуществляется контроль за работой аппаратуры РЛС.
Период наиболее продуктивной работы оператора составляет около получаса. Поэтому целесообразно, чтобы два оператора работали поочередно.
Опыт эксплуатации РЛС показал [12], что наилучшая пороговая чувствительность достигается тогда, когда в отсутствие сигнала след луча слабо светится и шумы видны па экране ЭЛТ. Экспериментально установлено, что чувствительность оператора на 3...5 дБ выше при слабом свечении следа, чем при полностью погашенном луче.
Ухудшение наблюдаемости может происходить из-за расфокусировки электронного луча что иллюстрируется графиком (рис. 9.31а). Наибольшее ухудшение наблюдаемости обусловлено дефокусировкой вдоль направления линии развёртки, особенно, если размеры пятна превышают 1мм.
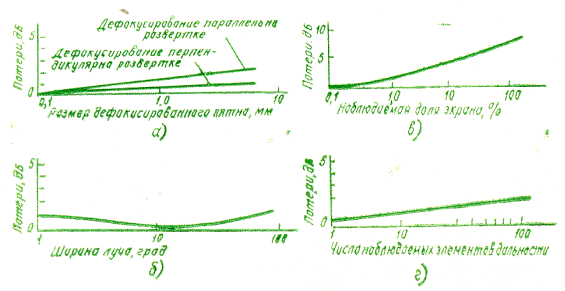
Рис. 9.31. Влияние на качество обнаружения цели: а — расфокусировки луча ЭЛТ;
б — ширины ДН антенны; в — наблюдаемой площади экрана ЭЛТ, %;
г — числа наблюдаемых элементов дальности
На обнаружение сигналов оказывают влияние яркость отметки цели и её размеры. Экспериментально установлено, что при постоянной яркости отметки наблюдаемость улучшается с увеличением площади отметки. Однако улучшение наблюдаемости происходит до определенного предела (рис. 9.31б).
Большое внимание на наблюдаемость сигналов оказывает предварительное знание участка экрана ЭЛТ, на котором следует ожидать появления отметки цели (рис. 9.31 в, г). Наилучший результат при работе оператора получается тогда, когда он проявляет особое внимание к обнаружению сигналов, сосредоточивая наблюдение в пределах небольшой зоны экрана индикатора.
При неблагоприятных условиях работы потери за счет оператора могут достигать 7 ... 10 дБ.
9.15. Методика учета потерь в тракте приёма и выделения сигналов
Методика учета потерь в приёмной антенне и тракте высокой частоты на приём рассмотрена в соответствующих параграфах этой главы. Все остальные потери учитываются при расчете коэффициента различимости γ входящего в уравнение радиолокации

Где Li - коэффициент потерь, обусловленный i-м фактором