

55. Регулювання об'єктів із запізнюванням?
Большинство технологических объектов характеризуется наличием чистого запаздывания в каналах регулирования.
Из-за значительного чистого запаздывания в объекте автоматизации существенно снижается качество регулирования при использовании обычных промышленных регуляторов.
качество процессов регулирования тем хуже, чем больше и само запаздывание, и ею отношение к постоянной времени объекта τ/Т.
В практике регулирования объектов с запаздыванием принято считать, что если отношение τ/Т превышает 0,2, то применение обычной непрерывной АСР со стандартным регулятором не обеспечит удовлетворительного качества регулирования.
56. Системи регулювання нестаціонарними об'єктами?
Многие технологические процессы, (в производстве лаков и красок, в микробиологической и пищевой отраслях промышленности), проводят в нестационарных условиях. Для некоторых процессов нестационарность обусловлена изменением характеристик аппарата вследствие изменения его нагрузки, образования накипи на трубах, старения катализатора и т. п. Иногда процессы проводят в нестационарных (обычно циклических) режимах с целью повышения их эффективности
Систему регулирования необходимо рассчитать таким образом, чтобы обеспечить удовлетворительное качество переходных процессов для всех возможных значений параметров линеаризованной модели. Рассмотрим некоторые особенности построения таких систем. Обеспечение рабастности систем регулирования. Термин «рабастность» означает малую чувствительность систем регулирования к изменению тех или иных свойств управляемого процесса.
Робастность можно обеспечить 4-я способами:
1. настройки параметров регуляторов, чтобы при некоторых средних характеристиках процесса степень устойчивости замкнутой системы η была максимальна.
2. выбор настроек регуляторов, оптимальных по отношению к наиболее неблагоприятному сочетанию параметров процесса.
Для астатического объекта с передаточной функцией
![]()
наиболее неблагоприятному сочетанию параметров соответствует максимальное отношение т/Т
Для статическою объекта с передаточной функцией
![]()
и П-регулятора наихудшее качество регулирования соответствует максимуму выражения
![]()
3. выбором регуляторов с переменной структурой
Такие регуляторы позволяют создать переходный процесс в замкнутой системе, близкий к некоторому желаемому, путем введения так называемою скользящею режима.
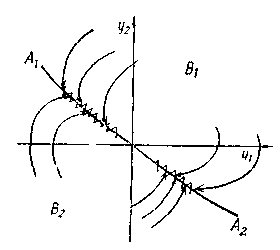
При изменении свойств объекта меняются только такие характеристики скользящего режима, как частота переключении.
4. использование принципа параметрической компенсации
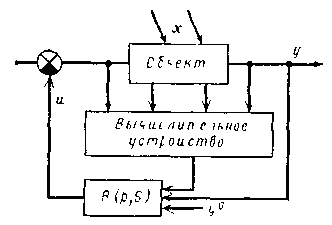
Параметры регулятора изменяют таким образом, чтобы, несмотря на изменение динамики объекта, степень устойчивости или степень колебательности системы не менялись Чаще всего таким измеряемым параметрическим возмущением является нагрузка объекта (расход материальных и энергетических потоков) Через контур адаптации изменение нагрузки меняет параметры регулятора таким образом, чтобы коэффициент усиления разомкнутой системы остался неизменным.