

Введение 1
Общая структурная схема системы управления. 2
Типовые описания блоков (объектов). 3
Общая запись системы уравнений в форме Коши для линейных систем с постоянными коэффициентами. 4
Преобразование Лапласа. 4
Способы описания динамических систем: 6
Свойство обратной связи 6
Статические системы 8
Устойчивость линейных систем 10
Устойчивость систем высокого порядка. 13
Понятие вариации функционала 17
Необходимое условие экстремума функционала 18
Задача Эйлера. Уравнение Эйлера. 19
Функционалы, зависящие от высших порядков 20
Функционалы, зависящие от нескольких аргументов (векторного аргумента) 22
Вариационные задачи с подвижными границами 26
Метод неопределенных множителей Лагранжа в задачах вариационного исчисления. 30
Достаточные условия экстремума функционала 36
Принцип максимума Понтрягина 38
Уравнение Беллмана 43
Лекция 1.
Введение
Теория оптимального управления предназначена для людей, которые создают автоматическое управление.
Динамические объекты – объекты, описывающиеся дифференциальными уравнениями.
R

C
T=RC
График зарядки конденсатора (который заряжается не сразу, т.е. имеет место явление запаздывания).

![]()
Общая структурная схема системы управления.

Упр.
воздействие
воздействие
Желание
Управление бывает двух видов:
-
разомкнутое (нет обратной связи)
-
замкнутое (есть обратная связь, характеризующаяся определенными свойствами)
Для сравнения двух возможных решений вводится критерий (числовой, значение его зависит от принятого решения), Y – критерий.
Цель – выбрать такое управленческое воздействие, чтобы критерий достиг самого хорошего значения.
Ресурс управления – средство, которым мы располагаем для изменения состояния объекта (как правило, ограничен).
Управление – целенаправленное использование ресурса управления для изменения состояния объекта.
Для применения математического объекта необходимо иметь дело с определенными классами задач.
Типовые описания блоков (объектов).
-
Объект управления
Описывается дифференциальными уравнениями (является динамическим объектом). Наиболее часто используются линейные ДУ, общий вид которых:

где
![]() - коэффициенты
- коэффициенты
u(t) – управляющее воздействие
x(t) – важная величина, характеризующая состояние объекта управления (выходная величина)
m≤n
n – порядок уравнения (объекта)
Лекция 2.
Динамические методы.

U(t) R Uc(t)

Все коэффициенты постоянны.
Описание динамических объектов в форме Коши:

 - в виде системы ДУ
первого порядка
- в виде системы ДУ
первого порядка
Пример превращения ДУ высокого порядка в форму Коши:


 -
2 уравнения первого порядка
-
2 уравнения первого порядка
Системы, описывающиеся одним и тем же ДУ могут иметь разные свойства!
Общая запись системы уравнений в форме Коши для линейных систем с постоянными коэффициентами.

 ,
где
,
где
![]() -
постоянные коэффициенты.
-
постоянные коэффициенты.
![]() ,
где
,
где
С,b – матрицы из постоянных элементов.
Переменные
![]() -
переменные состояния (соответствует
порядку уравнения). Значения переменных
состояния – начальные условия,
определяющиеся состояниями системы.
-
переменные состояния (соответствует
порядку уравнения). Значения переменных
состояния – начальные условия,
определяющиеся состояниями системы.
Преобразование Лапласа.
Пусть есть
![]()
Формальное преобразование:
![]()
Информация не утеряна. В качестве y – комплексное число.
Преобразование Лапласа:
![]()
![]() ,
z
– комплексная переменная.
,
z
– комплексная переменная.
Интегрирование эквивалентно делению на z.:

![]()

Если известно u(t), переводим в u(z), находим x(z) и по таблице находим решение.
![]()
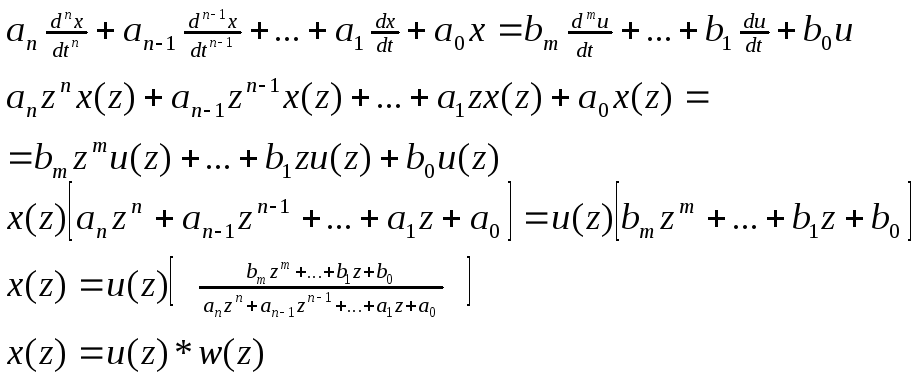
Нет необходимости решать уравнение высоких порядков.
Справедливо при нулевых начальных условиях

w(t) – передаточная функция
u(t)
x(t) – сняли эксперимент
u(z),x(z)
![]()
если u(t) – единичная ступенька
1
 u(t)
u(t)
x(t) – переходная функция
![]() -
импульсная переходная характеристика
-
импульсная переходная характеристика