Отношение длительности импульса на входе сжимающего фильтра τu к длительности импульса на выходе τu2 называется коэффициентом сжатия к
 .
.
Полагая, что потери в фильтре отсутствуют, получаем на выходе прежнюю энергию в импульсе:
 или
или
 .
.
Мощность импульса на выходе сжимающего фильтра возрастает в «к» раз. Тка, например, для сжатия импульса длительностью τu = 500 мкс в 100 раз, то есть до τu2 = 5 мкс необходимо, чтобы девиация частоты в импульсе была:
 .
.
Если при этом мощность импульса на входе фильтра составляет Ри вх = 1 мкВт, то на выходе фильтра мощность импульса будет



Используемая для генерирования излучения и обработки сигналов аппаратура в РЛС со сжатием импульсов похожа на соответствующие устройства обычных импульсных РЛС. Приемник РЛС, работающий по методу сжатия импульсов, должен иметь значительно более широкую полосу пропускания, чем приемник обычной импульсной РЛС.
Однако это не приводит к ухудшению соотношения сигнал/шум, ибо во сколько раз увеличивается мощность шумов, во столько же раз увеличивается мощность импульса при сжатии.
Повышение точности и разрешающей способности по дальности, имеющее место при сжатии импульсов, происходит практически без снижения дальности действия РЛС, которая зависит от энергии в импульсе и отношения сигнал/шум.
Численно потенциальная разрешающая способность по дальности при этом методе определяется длительностью сжатого импульса τu2
 .
.
РЛС с внутриимпульсной модуляцией имеет высокие тактические и технические характеристики благодаря использованию в них сложных зондирующих импульсов. Импульсная мощность передатчика достигает десятков меговатт. В качестве генераторов и усилителей СВЧ используются, в частности, лампы бегущей волны и клистронные усилители мощности.
В Ы В О Д
Метод сжатия импульсов позволяет значительно повысить дальность действия РЛС.
Широко используются в РЛС ПРО, где требуется обеспечить обнаружение ракет на больших дальностях.
В РЛС РТВ СВО используется реже из-за все-таки недостаточной разрешающей способности по дальности.
Второй учебный вопрос.
Двухчастотный метод радиолокации Одним из новых направлений развития современной радиотехники является многочастотная радиолокация. Сущность её заключается в зондировании пространства сигналами нескольких несущих частот, излучаемыми одной РЛС. Многочастотное зондирование пространства применяется для увеличения дальности действия РЛС, более точного измерения дальности и скорости цели, повышения помехозащищенности и улучшения других характеристик РЛС.
Наиболее распространенными типами современных многочастотных радиолокационных устройств являются:
многочастотные РЛС непрерывного излучения;
импульсные РЛС с одновременным излучением нескольких частот;
РЛС с череспериодной перестройкой несущей частоты от импульса к импульсу.
Рассмотрим принцип работы двухчастотной импульсной РЛС.
Упрощенная структурная схема двухчастотной импульсной РЛС и графики, поясняющие принцип работы, приведены на рис. 4.4 и 4.5 (слайды 31, 32, 40, 41).
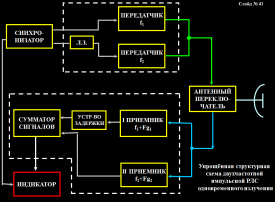
В состав РЛС входят два импульсных передатчика с разными несущими частотами зондирующих импульсов f1 и f2, синхронизатор, обеспечивающий одновременность их работы и два узкополосных приемника с общим сумматором сигналов.
Принцип
работы заключается в том, что передатчики
генерируют высокочастотные зондирующие
импульсы на двух разных частотах f1
и
f2 длительностью τu1
и
τu2,
общая длительность зондирующего импульса
составляет
длительностью τu1
и
τu2,
общая длительность зондирующего импульса
составляет
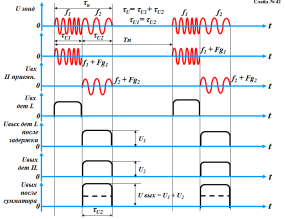
τu = τu1 + τu2.
Таким образом происходит скачкообразное изменение несущей частоты в пределах длительности каждого зондирующего импульса (τu).
Отраженные от целей сигналы на частотах (ƒ1 + Fg1 ) и (ƒ2+ Fg2) поступают на вход обоих приемников, где происходит их разделение. В приемниках I и II осуществляется независимая обработка принятых сигналов с различными несущими частотами.
Выходной сигнал Uвых.дет.1 I приемника до подачи на сумматор сигналов задерживается на время, равное τu1, и тогда он совпадает по времени с выходным сигналом II приемника Uвых.дет.2. На сумматоре сигналов Σ происходит суммирование выходных сигналов обоих приемников ( U1 + U2 ).
Длительность выходного импульса равна τu/2, то есть происходит сжатие импульсов, чем обеспечивается высокая разрешающая способность по дальности (δД).
Многочастотные РЛС обладают большим энергетическим потенциалом (Wu = Pu·τu), где τuбольшое), повышенной помехозащищенностью и надежностью работы (при выходе из строя одного передатчика или приемника работоспособность РЛС сохраняется, лишь ухудшаются отдельные характеристики).
Преимущества многочастотной радиолокации целей по сравнению с одночастным зондированием пространства позволяет считать это направление одним из наиболее перспективных.
Принцип многочастотной импульсной радиолокации нашли широкое применение в:
РЛС обнаружения и наведения для повышения помехозащищенности:
РЛС дальнего обнаружения для увеличения дальности действия или вероятного обнаружения целей:
РЛС наведения управляемых снарядов и ракет для повышения точности наведения по дальности и др.
Третий учебный вопрос.
Эффект Допплера и принцип измерения радиальной скорости цели
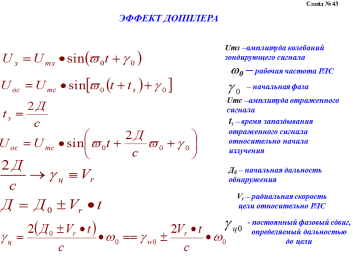
РЛС РТВ в основном обнаруживают и определяют координаты движущихся объектов. При работе РЛС по движущимся целям наблюдается изменение частоты отраженного сигнала по отношению к частоте зондирующего сигнала. Это явление называется эффектом Допплера.
Передатчик РЛС излучает зондирующий сигнал
Uз = Umз · sin(ωο t + φο), (1)
где Umз – амплитуда колебаний зондирующего сигнала;
ωο - рабочая частота РЛС;
φο - начальная фаза.
Сигналы, отраженные от цели, задержаны на время запаздывания
Uoc = Umc · sin[ωο(t +tз ) + ωο], (2)
где Umc - амплитуда отраженного сигнала;
tз - время запаздывания отраженного сигнала относительно начала из лучения.
Время задержки определяется по известной формуле
 .
.
Подставив это выражение в формулу (2), получим
Uос
= Umc
· ѕіn(ωοt+ ωο+φο).
(3)
ωο+φο).
(3)
Величина 2Д/с определяет фазовый сдвиг цели (φц), который характеризует изменение фазы на определенной дальности. При неподвижной цели дальность до нее не изменяется, поэтому сдвиг фазы отраженного сигнала будет постоянным в различных периодах обзора (φц = const)/
При отражении сигнала от движущейся цели дальность до нее изменяется в зависимости от скорости движения цели (рис. 5.6, слайд 30, 43).