

1.2. Методические рекомендации по выполнению курсовой работы
1.2.1. Анализ исходных данных, разработка функциональной схемы системы автоматического регулирования
Разработка САР начинается с анализа исходных данных. Для этого изучается схема, представленная на рисунке 3. По табл. А.7 определяется вариант задания на курсовую работу, соответствующий Ф.И.О. студента. Из таблиц исходных данных (приложение А) выписываются численные значения, характеризующие элементы схемы рисунка 3 и требования к САР, соответствующие варианту задания на курсовую работу.
Составляется функциональная схема САР. Функциональная схема должна содержать все элементы схемы рисунка 3. Соединения функциональных элементов осуществляются стрелочками с указанием над стрелочками переменных координат. При этом необходимо иметь в виду, что выходная координата предыдущего блока должна быть управляющей для последующего. Функциональная схема составляется с таким расчетом, что по ней можно проследить каналы прохождения энергии, необходимой для выполнения ПР, и сигнала управления выходной координатой. В дальнейшем на основе функциональной схемы будет разрабатываться структурная схема САР.
1.2.2. Анализ процесса резания как объекта управления
Объектом управления в данной курсовой работе является процесс резания металла. Анализ процесса резания как объекта управления является одним из наиболее сложных этапов разработки систем автоматического регулирования. Это обусловлено тем, что перед началом разработки САР каждый ТП, подлежащий автоматизации, является новым для разработчика. Поэтому, разработчик вынужден воспользоваться соответствующей технической литературой, например, [3], знаниями технолога и специалистов по оборудованию, чтобы осуществить математическое описание оборудования и ТП в целях определения его статических и динамических характеристик и представления ОУ в виде структурной схемы.
Описанию ОУ посвящено много технической литературы, однако в связи с тем, что теория автоматического регулирования сравнительно молодая наука, терминология по описанию ОУ пока окончательно не установилась. Поэтому рассмотрим рекомендации [4, 5, 6] по данному вопросу.
1.2.2.1. Вопросы терминологии
Под объектом управления следует [4] понимать объект, для достижения желаемых результатов функционирования которого необходимы и допустимы специально организованные воздействия.
Объект – это выделенная по некоторым правилам часть мира, являющаяся предметом познания практической деятельности.
Воздействие есть влияние одного объекта на другой, вызывающее в последнем изменение его свойств и (или) состояния. К воздействиям относят управляющие координаты Х, входные параметры F, возмущения f, действующие на ОУ.
Обычно процесс или оборудование как ОУ представляют в виде функциональной схемы (рисунок 1):
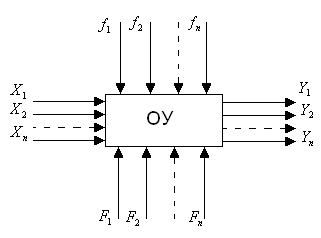
Рисунок 1 – Функциональная схема многомерного ОУ
Y1, Y2, …, Yn – выходные координаты ОУ (управляемые координаты), они количественно определяют качество хода ПР;
X1, X2, …, Xn – управляющие воздействия (координаты), то есть воздействия на ОУ, предназначенные для достижения цели управления;
F1, F2, …, Fn – входные параметры ОУ. Эти параметры могут изменять выходные координаты ОУ, как и управляющие воздействия, но в процессе управления считают, что они остаются неизменными, поэтому при математическом описании объекта могут быть представлены как коэффициенты, а на функциональной схеме иногда могут быть не показаны;
f1, f2, …, fn – возмущения, это воздействия извне на любой элемент (подсистему) системы управления, включая ОУ, затрудняющие, как правило, достижение цели управления. Возмущениями могут быть параметры или отклонения параметров ТП, влияющие на величину выходных координат, и произвольно меняющиеся в ходе ведения ТП, их часто бывает невозможно контролировать. Компенсация действия возмущений на выходную координату может быть целью автоматического регулирования управляющего воздействия.
Цель управления – это значения, соотношения значений координат в ОУ или их изменения во времени, при которых обеспечивается достижение желаемых результатов функционирования объекта. Управляющим воздействием можно регулировать выходные координаты ОУ.
Параметр объекта – это величина, характеризующая свойство объекта, значения которой определяются по количественной шкале.
Регулирование — это управление, цель которого заключается в обеспечении близости текущих значений одной или нескольких координат ОУ к их заданным значениям.
Управление – это процесс выработки и осуществления управляющих воздействий. Выработка управляющих воздействий включает в себя передачу и обработку необходимой информации, принятие решений, обязательно включающее определение управляющих воздействий. Осуществление управляющих воздействий включает передачу управляющих воздействий и при необходимости преобразование их в форму, непосредственно воспринимаемую ОУ.
ОУ, представленный в виде функциональной схемы (рисунок 1), является многомерным, то есть таким ОУ, математическая модель функционирования которого содержит несколько управляющих и (или) управляемых координат.
Если САР регулирует только одну выходную координату ОУ, то многомерный ОУ должен быть преобразован в одномерный. Математическая модель функционирования одномерного ОУ содержит одну управляющую координату Х и одну управляемую координату Y (рисунок 2).
Для преобразования многомерного объекта в одномерный разработчик должен прежде всего определиться с тем, какую выходную координату необходимо регулировать. Эта координата определяется требованиями повышения качества ведения ТП, поэтому чаще всего задается технологом или специалистом по оборудованию. Изменения других выходных координат не контролируются, однако по диапазону изменения этих координат могут быть заданы ограничения, что необходимо будет учитывать при проектировании САР.

Рисунок 2 – Функциональная схема одномерного ОУ
После выбора выходной координаты разработчик определяет управляющее воздействие. Управляющее воздействие выбирается исходя из условий наиболее простой реализации устройства, регулирующего управляющее воздействие ОУ. При прочих равных условиях управляющее воздействие выбирается исходя из условия, что выбранная управляющая координата эффективнее других может изменять выходную координату.
Оставшиеся управляющие воздействия многомерного ОУ относят к возмущениям или к входным параметрам ОУ. При исследовании динамических свойств объекта следует воспользоваться методами замороженных коэффициентов и замороженных реакций.