

27 Опрокидывание экипажей в кривых. Одноярусное рп
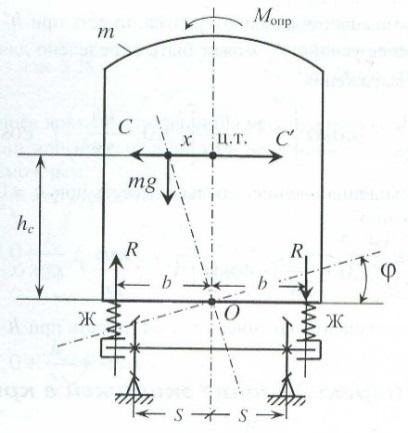
Уравнение равновесия надрессорного строения под действием опрокидывающего и восстанавливающего моментов имеет вид:
(С-С’)*hc+mgx-2Rb=0
где R=Ж*b*φ, 2b-расстояние между рессорными комплектами одной колесной пары, Ж-эквивалентная жесткость рессорного подвешивания одной стороны экипажа, x-отклонение центра тяжести от положения равновесия при наклоне надрессорного строения m на угол φ.
Подставив:

Из
условия видно что опрокидывание экипажа
произойдет при x≥b,
то есть при φ≈
После подстановки в уравнение равновесия найдем скорость движения, при которой становится возможным опрокидывание экипажа и сход его с рельсов:

при наличии возвышения внешнего рельса, то есть при h≠0
29 Силы, возникающие в приводе 1 класса при работе тягового двигателя.
Рассмотрим
силы, возникающие в отдельных элементах
и узлах привода при движении локомотива
с равномерной скоростью по абсолютно
ровному пути, при установившемся режиме
движения. В этих условиях электромагнитный
момент на валу якоря (Мдв
= const)
и передаточное отношение (µ= )
редуктора остаются постоянными.
)
редуктора остаются постоянными.
На зубцы зубчатого колеса со стороны шестерни будет действовать вертикальная сила Z,направленная вниз. Приведем ее к центру оси колесной пары, приложив здесь две равные и противоположно направленные силы Z.
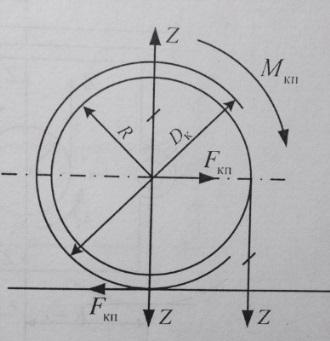
Вращающий момент КП Мкп=Z*R удобно выразить через касательную силу тяги:
 , кН*м.
, кН*м.
Вертикальная сила Z, приложенная к оси колесной пары в плоскости зубчатого колеса:

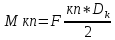
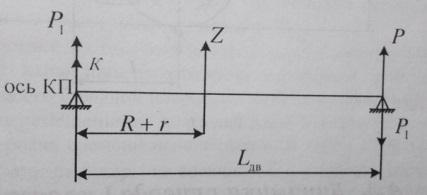
Рассмотрим силы, действующие на корпус тягового двигателя.
Со стороны зубцов зубчатого колеса действует вертикальная реакция, равная по величине силе Z, но направленная вверх.
Приведем ее к центру вала якоря, приложив здесь две равные и противоположно направленные силы Z. Получаем пару сил с моментом Мкп=Z*R и вертикальную силу Z, приложенную к валу якоря и передающуюся на корпус двигателя через якорные подшипники. Силу Z можно представить в виде двух составляющих К и Р, соответственно разгружающих колесную пару и подвесной аппарат:
Где
 – радиус шестерни, м.
– радиус шестерни, м.
Сила К приложена к оси колесной пары в месте установки моторно-осевых подшипников.
Далее находим Р:
Сила Р приложена к поперечному креплению рамы тележки в месте установки подвесного аппарата.
Вращающий
момент
 Этот момент можно представить в виде
пары сил.
Этот момент можно представить в виде
пары сил.

В результате на ось колесной пары действует вертикальная сила:

Где
 – диаметр круга катания движущего
колеса.
– диаметр круга катания движущего
колеса. -
база тягового двигателя.
-
база тягового двигателя. -
сила тяги, реализуемая одной движущей
колесной парой.
-
сила тяги, реализуемая одной движущей
колесной парой.
30 Динамика привода 1 класса
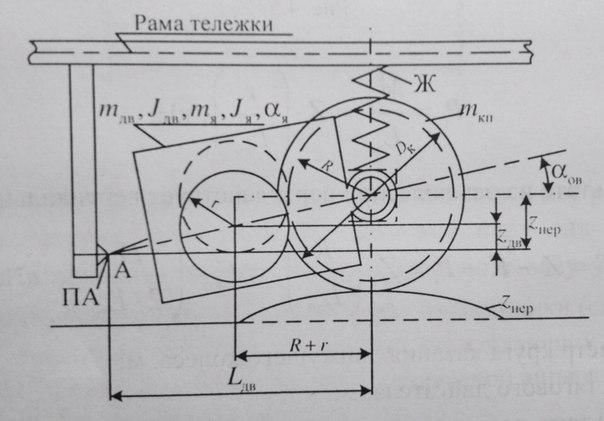

h – глубина неровности.
Угловая частота вертикальных перемещений:

Центр колеса перемещается относительно центра шестерни на величину Z=Zнер-Zдв.
Это ведет к перекатыванию шестерни по зубчатому колесу и повороту якоря на угол: αя=(R+r)*αдв/r=(1+u)*αдв, где u=R/r – передаточное число редуктора.
Полное давление на путь КП: Рполн=Рдин+Рстатич