

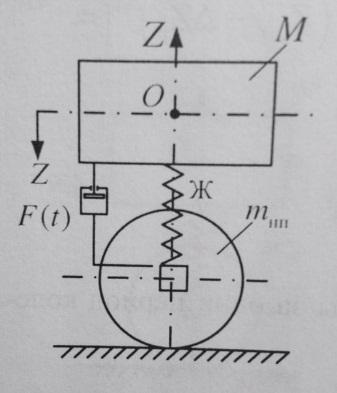
16 Увеличение амплитуды вертикальных колебаний за один период в резонансном режиме под действием периодической возмущающей силы


В режиме резонанса система совершает колебания синусоидального характера с одной из главных частот
![]()
![]()
Уравнения вынужд. колебаний:
![]()
![]()
Из решение:

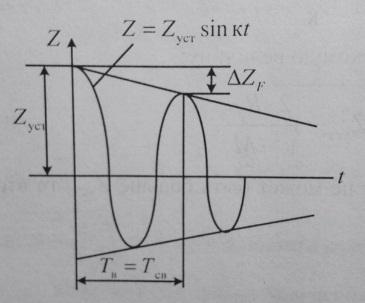
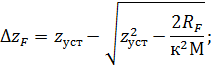
Уменьшение амплитуды колебаний под действием силы сопротивления за один период при работе в резонансном режиме
Уравнение свободных колебаний в резонансном режиме при наличии в системе силы сопротивления F(t):
![]()
Из решения:
Основное условие обеспечения устойчивого колебательного процесса в режиме резонанса.
Устойчивый колебательный процесс в режиме резонанса (при движении с Vкр) может быть обеспечен, если увеличение амплитуды колебаний надрессорного строения за один период под действием вынуждающей силы будет компенсироваться уменьшением ее на такую же величину под действием силы сопротивления, то есть если будет достигнуто равенство ∆ Zp = ∆ZF.
Это равенство мы получим при условии равенства работ возмущающей силы P(t) и силы сопротивления F(t) за период колебаний, то есть если Rp = Rf
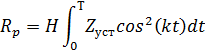
17 Работа возмущающей силы за один период колебаний в резонансном режиме
Значение
периодической силы: ![]()
В режиме резонанса р=к, работа за один период колебаний:

Вертикальные перемещения описаны:
![]()
![]() и
и ![]()
Пусть
![]() =>
=> ![]()
![]()
Работа силы сопротивления за один период колебаний в резонансном режиме
В
качестве источника сил сопротивления
используют гидравлический гаситель
колебаний с силой сопротивления ![]()
![]() – коэфф сопротивления гидравл.колебания
– коэфф сопротивления гидравл.колебания
![]()
Работа
колебаний определяется: ![]()
![]()
![]()


Коэффициент сопротивления гидравлического гасителя колебаний
Т.к.
установившейся процесс колебаний
амплетудой Zуст
может
быть достигнуто только при равенстве
работ Rp
и RF
. Необходимый параметр гаситеся колебаний
определяется из уравтения: ![]() .
. ![]() ,
,
![]()
H-амплитудное значение возмущающей силы.
18 Основные факторы, затрудняющие движение экипажа в кривой, и способы их устранения
1 Жесткая посадка колес на ось колесной пары. Вследствие этого для внутренних и внешних колес неизбежно проскальзывание, сопровождающееся дополнительными силами трения.
2 Колесные пары, расположенные в одной жесткой раме, установленной параллельно друг другу, что вызывает дополнительное проскальзывание и появляется сила трения от набегания на рельс.
3 Заклинивание экипажа в кривой. Положение заклинивания – когда крайние колесные пары своими гребнями бандажей касаются внешнего рельса, а одна из промежуточных КП касается гребнем внутреннего рельса. Радиус кривой, в которой возможно заклинивание – радиус заклинивания, имеет место при R<=100–110
Основные меры обеспечивающие прохождения экипажа в кривой
1) создание возможных поперечных смещений КП относительно рельсы в пределах установленного норм путем применения балластных поводковых букс
2) применение конусной поверхности катания бандажей колес. Внешнее колесо проходит больший путь при одинаковом числе оборотов с внутренним колесом, что уменьшает проскальзование колес по рельсам
3) применяется смазывание гребней КП.
4) уменьшение жесткости базы путем уменьшения числа КП в одной раме
5) Применение в искл. случаях безреберных колес для промежуточных КП.