

ЭМС
.pdfесли индукция в них не достигает колена кривой намагничивания (см.
рис. 1.9).
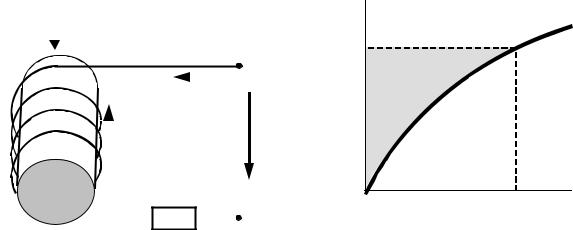
Рассмотрим обмотку, расположенную в воздухе, намотанную проводом с активным сопротивлением R и подключённую к источнику с напряжением u (рис. 3.16). По обмотке будет протекать ток i. Применяя второй закон Кирхгофа, напишем уравнение для напряжений:
u = i R + |
dΨ |
. |
(3.3) |
|||||||||
|
||||||||||||
|
|
|
|
dt |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
i |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||||
|
|
e |
|
|
|
|
|
|
||||
|
|
R |
|
|
u |
|
|
|||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
_ |
|
|
||||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.16
Перемножив все члены уравнения (3.3) на ток i, получим уравнение для мощностей:
u i = i2 R +i |
dΨ |
. |
(3.4) |
|
|||
|
dt |
|
|
Проинтегрируем это уравнение в пределах промежутка времени (t2 - t1) и получим уравнение баланса энергии.
t∫2 u i dt = t∫2 i2 R dt +t∫2 i |
dΨ |
dt . |
(3.5) |
||
|
|||||
t1 |
t1 |
t1 |
dt |
|
|
Рассмотрим все три члена полученного уравнения. Левый член уравнения (3.5) – это энергия, затраченная источником за промежуток времени
(t2 - t1):
WU = t∫2 u i dt .
t1
Второй член уравнения (3.5) – это тепловые потери за промежуток времени
(t2 - t1):
t 2
WT = ∫i2 R dt .
t1
Наконец третий член уравнения (3.5) – это энергия магнитного поля, поступившая в обмотку за промежуток времени (t2 - t1):
t 2 dΨ
WM = t∫1 i dt dt .
3 1

Заменим переменную, полагая, что Ψ1 – потокосцепление в момент времени t1, а Ψ2 – потокосцепление в момент времени t2.:
Ψ2 |
|
WM = ∫i dΨ. |
(3.6) |
Ψ1 |
|
С учётом линейности системы, получим выражение для электромагнитной энергии обмотки с током
Ψ2 |
Ψ2 |
−Ψ2 |
(3.7) |
WM = ∫i dΨ = |
2 |
1 |
|
Ψ1 |
|
2L |
|
Рис. 3.17 иллюстрирует выражение |
(3.7). График зависимости |
||
Ψ = L i – линейный. Наклон графика |
определяется |
индуктивностью |
|
Tg(α) = L. Площадь заштрихованной трапеции пропорциональна изменению электромагнитной энергии обмотки WM за промежуток времени (t2 - t1). В системе, соответствующей рис. 3.17, ток возрастает (i2 > i1). Поэтому и WM > 0.
|
Ψ |
|
Ψ2 |
WM |
|
|
|
|
Ψ1 |
|
i |
|
α |
|
0 |
i1 |
i2 |
|
Рис. 3.17 |
|
|
Ψ |
Ψ |
WM |
|
WM |
0 |
i |
i |
|
|
Рис. 3.18 |
Если в начальный момент времени (при t1 = 0) ток отсутствует (i1 = 0), то и Ψ1 = 0. Тогда выражение для электромагнитной энергии будет иметь вид:
WM = |
Ψ2 |
= |
L i2 |
= |
Ψ i |
= |
Ф Iw |
. |
(3.8) |
|
2L |
2 |
2 |
2 |
|||||||
|
|
|
|
|
|
Геометрическая интерпретация энергии обмотки в соответствии с выражением (3.8) преобразуется в треугольник (рис. 3.18).
3.3.2.Влияние нелинейности (L = Var)
Вбольшинстве случаев магнитные системы снабжают ферромагнитными деталями (якорь, сердечник, кожух и т.п.). Ферромагнитная среда в μ раз увеличивает магнитный поток по сравнению с вакуумом. Увеличивает-
3 2
ся не только поток, но и индуктивность (см. выражение (1.4)), электромагнитная энергия (см. выражение (3.8)) и сила электромагнитного взаимодействия. Однако из-за нелинейных характеристик ферромагнитных материалов вебер-амперная характеристика всей магнитной системы также оказывается нелинейной. Рассмотрим нелинейную систему на примере электромагнита с обмоткой, намотанной проводом с активным сопротивлением R и подключённой к источнику с напряжением u (рис. 3.19) при отсутствии потерь в нелинейном сердечнике. По обмотке будет протекать ток i.
Рассуждения, приведённые выше для линейной системы справедливы также и для нелинейной вплоть до выражения (3.6). Дальнейшие рассуждения и выражение (3.7) применимы только для линейной системы. Поэтому определим электромагнитную энергию системы по рис. 3.19, используя выражение (3.6). Для этого положим, что в начальный момент времени ток i1 = 0 и потокосцепление Ψ1 = 0. Тогда выражение (3.6) преобразуется к виду:
WM = Ψ∫i dΨ. |
(3.9) |
0 |
|
На рис. 3.20 показана вебер-амперная характеристика электромагнита с неподвижным сердечником (x = Const). Из графика видно, что характеристика нелинейна, т.е. индуктивность L изменяется в зависимости от тока, проходящего по обмотке. Следует иметь в виду, однако, что индуктивность обмотки, а следовательно и потокосцепление, могут изменяться также в зависимости от положения или геометрии сердечника. То есть соотношение между тремя переменными можно записать в виде уравнения Ψ = f(i, x). График по рис. 3.20 построен для магнитной системы с сердечником, зафиксированным и не изменяющим своего геометрического состояния относительно обмотки.
 x
x
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
i |
|
|
|||
|
|
|
e |
|
|
|
|
u |
|||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||
Fe |
|
|
|
|
R _ |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.19
Ψ Ψ |
|
0 |
i |
|
Рис. 3.20 |
Заштрихованный криволинейный треугольник на рис. 3.20 соответствует электромагнитной энергии WM при токе i и потокосцеплении Ψ . Ес-
3 3

ли теперь отпустить сердечник, то под действием электромагнитной силы сердечник переместится и совершит при этом работу. Кроме того, перемещение сердечника приведёт к изменению вебер-амперной характеристики.
При анализе энергетических преобразований следует рассмотреть два режима работы. Во-первых, система, с неизменным потокосцеплением (Ψ = Const), не зависящим от положения сердечника. Во-вторых, система с неизменным током (i = Const), не зависящим от положения сердечника. На практике обе указанные величины изменяются в той или иной степени. Но всё же разные типы электромагнитов ближе либо к первому, либо ко второму режиму. Строгое соблюдение условия Ψ = Const возможно только, если активное сопротивление всей цепи равно нулю (см. раздел 1.4.1). К такому режиму ближе электромагниты переменного тока. Соблюдение второго режима (i = Const) достигается, если цепь питается от источника тока (R = ∞). Большое сопротивление обмотки характерно электромагнитам постоянного тока.
Рассмотрим первый режим (Ψ = Const). На рис. 3.21 показаны веберамперные характеристики для двух положений сердечника x1 и x2. и соответствующих им токах i1 и i2. Для обоих положений сердечника потокосцепление одинаково и равно Ψ1. Поскольку активное сопротивление цепи равно нулю, то потери на нагрев отсутствуют, и потребляемая электрическая энергия также равна нулю. Тогда имеем:
WМЕХ = − WМ ,
а WM равна площади криволинейного треугольника 0ab. Средняя электромагнитная сила, действующая на сердечник
FM .СР = x2W−Mx1 = − WxM .
Переходя от приращений к бесконечно малым величинам, получим значение электромагнитной силы при любом положении сердечника и условии
Ψ = Const
FM = − |
dWM |
(Ψ = Const). |
(3.10) |
|
dx |
||||
|
|
|
Теперь рассмотрим второй режим (i = Const). На рис. 3.22 показаны вебер-амперные характеристики для двух положений сердечника x1 и x2 при потокосцеплениях Ψ1 и Ψ2 соответственно. Для обоих положений сердечника ток одинаков и равен i1. В этом случае механическая энергия
WМЕХ равна разнице между изменением электрической энергии |
WU и из- |
менением энергии магнитного поля WM, то есть WМЕХ = WU - |
WM. Эта |
разность представлена на рис. 3.22 в виде криволинейного треугольника ab0. Площадь этой фигуры можно вычислить интегрированием
i1 |
i1 |
|
Sab0 = ∫ |
Ψ2 (i) di −∫Ψ1 (i) di . |
(3.11) |
0 |
0 |
|
3 4

Ψ |
|
|
x2 |
Ψ1 |
a |
b |
x1 |
0 |
|
|
i |
i2 |
i1 |
|
|
|
Рис. 3.21 |
|
|
Ψ |
b |
x2 |
|
Ψ2 |
|
x1 |
|
Ψ1 |
a |
||
|
|||
0 |
|
i |
|
i1 |
|
||
|
Рис. 3.22 |
|
Каждый из интегралов в выражении (3.11) не отражает никакого физического смысла. Это выражение получено математическим путём. Однако все составляющие этого выражения помогают проанализировать энергетическое состояние магнитных систем. Поэтому интегралы, входящие в (3.11), получили название коэнергии WКО [1], то есть
WКО = i∫1 Ψ(i) di . (3.12)
0
Между коэнергией и энергией магнитного поля существует соотношение
WM + WKO = Ψ1 i1.
Действительно, из рис. 3.23 видно, что площадь прямоугольника со сторонами Ψ1 и i1. состоит из двух площадей, лежащих выше и ниже веберамперной характеристики.
С учётом приведённых рассуждений и выражений (3.11) и (3.12) получим значение электромагнитной силы при любом положении сердечника
и условии i = Const |
|
|
||
FЭ = |
dWКО |
(i = Const). |
(3.13) |
|
dx |
||||
|
|
|
||
В частном случае, в линейной системе вебер-амперная характеристика имеет вид прямой линии (рис. 3.24), которая делит прямоугольник со сторонами Ψ1 и i1. на две равные части. В линейной системе
Ψ1 |
Ψ |
Ψ1 |
Ψ |
|
|
WM |
|
WM |
|
|
WКО |
|
WКО |
|
|
i |
|
i |
|
0 |
0 |
|
||
i1 |
|
i1 |
||
|
Рис. 3.23 |
|
Рис. 3.24 |
|
3 5
WM = WKO,
поэтому понятие коэнергии имеет смысл только для нелинейных систем. Магнитную коэнергию можно представить как механическую рабо-
ту, совершаемую электромагнитными силами при перемещении обмотки, заранее возбужденной током i1 = const и бесконечно удаленной от магнитопровода, в прежнее положение на магнитопроводе.
3.4. Индукционный преобразователь
Подвижная часть (ротор) индукционного преобразователя должна быть электропроводной. При размещении ротора в переменном магнитном поле в нём индуцируется ЭДС (в соответствии с законом электромагнитной индукции) и возникают вихревые токи, которые, в свою очередь, взаимодействуют с переменным магнитным потоком и создают рабочее усилие (вращающий момент). Из принципа действия следует, что индукционные устройства работают от переменного тока.
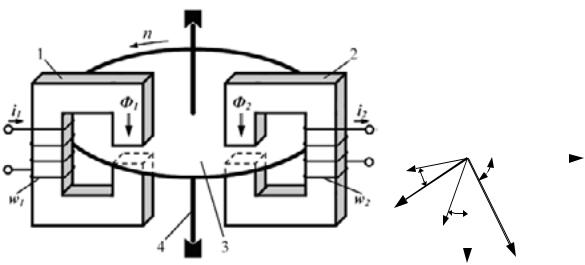
На рис. 3.25, а показан преобразователь с ротором в виде диска. Шихтованный магнитопровод 1 с воздушным зазором и обмоткой w1, по которой проходит переменный ток i1, создают переменный магнитный поток
Ф1 = Ф1М Sin(ωt).
Такой же шихтованный магнитопровод 2 с воздушным зазором и обмоткой w2 с током i2 создают переменный магнитный поток
Ф2 = Ф2М Sin(ωt – ψ).
Поток Ф2 отстаёт от потока Ф1 на угол ψ (см. рис. 3.25, б) из-за того, что токи i1 и i2 также должны не совпадать по фазе.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
I2Д |
|
|
|
|
|
|
|
|
|
||||
ϕ |
|
|
|
Ψ |
|
|
|
Ф1 |
|||||||
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E |
2Д |
|
|
ϕ |
|
|
|
|
|
|
|
|
|||
1Д |
|
|
|
Ф2 |
|||||||||||
|
|
|
|
|
I |
|
|
1Д |
|||||||
|
|
|
|
|
|
|
|
|
E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
а) |
|
б) |
|
|
|
|
|
||||||||
Рис. 3.25
3 6
В воздушных зазорах обоих магнитопроводов расположен электропроводный (чаще всего алюминиевый) диск 3, установленный на подшипниковой оси 4. Магнитные потоки, пересекая диск 3, индуцируют в нём ЭДС. От потока Ф1 в диске наводится Е1Д, а от потока Ф2 наводится Е2Д (рис. 3.25, б), причём каждая ЭДС отстаёт от своего потока на 90°.
Возникшие таким образом ЭДС создают в электропроводном диске 3 вихревые токи: i1Д от ЭДС Е1Д и ток i2Д от ЭДС Е2Д (рис. 3.25, б). Из-за того, что характер этих токов активно-индуктивный, токи отстают от своих ЭДС на угол ϕ, причём, если магнитопроводы 1 и 2 расположены симметрично, то углы ϕ для обоих токов одинаковые.
Часть тока I′2Д = m I2Д протекает в области зазора магнитопровода 1 и взаимодействует с потоком Ф1. Коэффициент m учитывает, что только часть тока взаимодействует с этим потоком. Тогда в соответствии с законом Ампера (1.9) мгновенная сила, действующая на ток I′2Д в диске, равна
FИ2 = I′2Д B1 l = m i2ДM Sin(ωt – ψ – 90° – ϕ ) Ф1M Sin(ωt) l / S,
где: l – длина линии тока; S – площадь сечения магнитопровода в зазоре; B1 – магнитная индукция в зазоре.
Аналогично получим мгновенную силу, действующую на ток I′1Д в
диске
FИ1 = I′1Д B2 l = m i1ДM Sin(ωt – 90° – ϕ ) Ф2M Sin(ωt – ψ ) l / S.
Чтобы получить значение средней силы, действующей на диск за период в двух воздушных зазорах, проинтегрируем сумму (FИ1 + FИ2) в пределах от 0 до 2π с учётом выражения (1.8) и закона Ома (iД = eД / ZД):
FИ.СР = |
1 |
2∫π(FИ1 + FИ2 ) d(ωt)= |
w l |
|
ω |
Cosϕ Ф1M Ф2M Sinψ , |
(3.14) |
|
S |
|
|||||
|
2π 0 |
|
2π Z Д |
|
|||
где: ZД – полное сопротивление пути тока в диске; w – число витков в об-
мотках (w1 = w2 = w).
Вращающий момент, приложенный к диску, равен
МИ = FИ R Cosβ,
где: R – радиус, проведённый от оси 4 (рис. 3.25, а) до центра приложения сил FИ1 и FИ2; β – угол между векторами сил FИ1 и FИ2 и касательными к диску в точках приложения этих сил.
Из выражения (3.14) видно, что усилие в индукционном преобразователе с диском пропорционально произведению потоков и синусу угла сдвига фаз между ними. Для образования вращающего момента необходимо, чтобы потоки были сдвинуты во времени и в пространстве. Результирующий вращающий момент будет направлен в сторону отстающего потока (см. рис. 3.25). Максимальное значение вращающего момента имеет место при сдвиге фаз потоков на 90° и Cos ϕ = 1 (диск должен иметь только активное сопротивление).
В качестве примечания следует отметить, что при наличии только одного магнитопровода с обмоткой (например, 1 и w1 на рис. 3.25, а) маг-
3 7

нитный поток Ф1 будет взаимодействовать с током i1Д, в результате чего возникнет сила, выталкивающая диск из зазора и направленная по радиусу диска. Поскольку рычаг в этом случае равен нулю, то и вращающий момент в такой системе отсутствует. Однако если этот единственный полюс расположен асимметрично относительно радиуса диска, то сила будет направлена не по радиусу и появится вращающий момент.
В силовых устройствах индукционный преобразователь наиболее частое применение находит в трёхфазном асинхронном двигателе. Асинхронный двигатель состоит из двух основных частей: статора 1 и ротора 2 (рис. 3.26). Статор – неподвижная часть двигателя, служит для создания вращающегося магнитного поля. Он содержит три одинаковые фазные обмотки (по числу фаз) А, В и С (см. рис. 3.26). Обмотки расположены в пространстве под углом 120° друг к другу. Для подключения к трёхфазной сети обмотки можно соединить в треугольник или в звезду. При этом номинальное напряжение для звезды больше в  3 раз.
3 раз.
Трёхфазный ток, проходя по трём обмоткам статора, обеспечивает временной фазовый сдвиг на 120° для трёх магнитных потоков. При этом создаётся вращающееся магнитное поле. Для усиления магнитного потока применяется шихтованный ферромагнитный сердечник. Он выполнен в виде полого цилиндра и набран из тонких, изолированных друг от друга пластин. На его внутренней поверхности имеются продольные пазы, в которые уложены упомянутые обмотки (см. рис. 3.26).
Скорость вращения магнитного поля n1 зависит от частоты тока f и от
числа пар полюсов p.
n1 = |
60 f |
(об/мин). |
(3.15) |
|
p |
|
|
Если каждая фаза имеет по одной обмотке, как показано на рис. 3.26, то p = 1. Однако возможно исполнение статора с несколькими обмотками на каждую фазу, т. е. p может быть равно любому целому числу.
Направление вращения поля зависит от чередования фаз во времени и от расположения фазных обмоток в пространстве. При чередовании фаз во времени А, В, С, поле поворачивается от обмотки А в сторону обмотки В, потом в сторону обмотки С (на рис. 3.26 показано по часовой стрелке). Из сказанного понятно, что для реверсирования (изменения направления вращения) надо изменить чередование фаз, т. е. один линейный провод (например, подключённый к обмотке А) оставить на своём месте, а два других поменять местами.
Ротор – вращающаяся часть асинхронного двигателя. Существует два типа роторов: фазный и короткозамкнутый. Фазный ротор содержит три фазные обмотки, к которым можно подключить регулировочные реостаты посредством подвижных контактов. Подвижные контакты состоят из вращающихся контактных колец, установленных на валу ротора, и неподвижных токосъёмных щёток, установленных на станине статора.
3 8
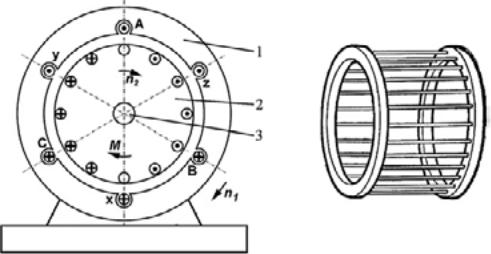
Наибольшее распространение получил короткозамкнутый ротор. Он выполняется из электропроводного материала (медь, алюминий) в виде беличьей клетки (рис. 3.27). Поскольку ротор устанавливается внутрь статора (см. рис. 3.26) и находится в магнитном поле, то внутренняя полость ротора заполняется ферромагнитным сердечником. Ротор в подшипниковых опорах может свободно вращаться на валу 3 (см. рис. 3.26).
Рис. 3.26 |
Рис. 3.27 |
Магнитное поле статора пересекает обмотку ротора (беличью клетку) и индуцирует в ней переменную ЭДС. Поскольку обмотка ротора замкнута, эта ЭДС вызывает в ней переменный ток. В результате взаимодействия тока ротора с магнитным полем статора возникает вращающий момент M, действующий в сторону вращения магнитного поля (см. рис. 3.26). Под действием момента вращения ротор приходит в движение и после разгона вращается со скоростью n2, несколько меньшей, чем n1. Это условие является непременным, поскольку при равных скоростях n1 и n2 поле статора не будет индуцировать в роторе ЭДС. Именно поэтому двигатель и называется асинхронным.
Как уже отмечалось, для образования вращающего момента в индукционном преобразователе необходимо наличие как минимум двух переменных магнитных потоков, сдвинутых как по фазе во времени, так и в пространстве. Смещение потоков в пространстве обеспечивается конструкцией устройства. Сдвиг фаз переменных магнитных потоков обеспечивается многофазным источником питания. Например, асинхронный двигатель питается, как правило, от трёхфазной сети. Применение многофазного источника ограничивает область применения индукционных преобразователей.
3 9
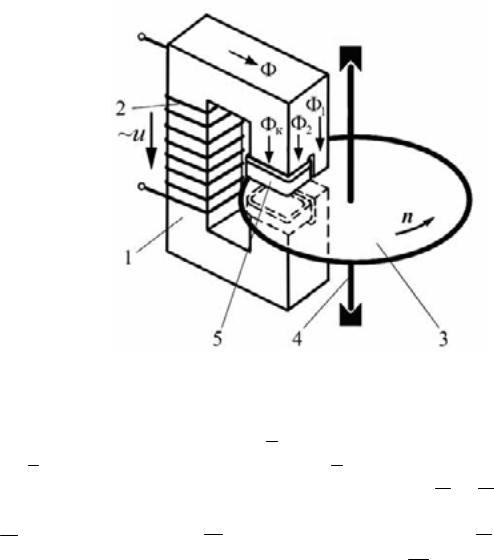
На рис. 3.28 показан индукционный преобразователь с питанием от однофазного переменного тока, в котором сдвиг фаз магнитных потоков осуществляется с помощью короткозамкнутого витка.
Ферромагнитный шихтованный магнитопровод 1 с обмоткой 2 имеет воздушный зазор между полюсами, расщеплёнными на две части. Одна часть полюсов охвачена электропроводным короткозамкнутым витком 5. Ротором здесь является электропроводный диск 3, установленный на подшипниковой оси 4.
Работа такого преобразователя поясняется рис. 3.29, а, где показаны потоки, проходящие через полюс, и векторной диаграммой по рис. 3.29, б. Для упрощения рассуждений примем, что активное сопротивление обмотки 2 равно нулю, нет потоков рассеяния, не связанных с сердечником 1, сопротивление короткозамкнутого витка 5 – активно-индуктивное.
Рис. 3.28
В случае отсутствия КЗ-витка 5 обмотка 2, подключённая к напряжению u, создаёт магнитный поток Ф, который на 90° опережает ЭДС обмотки E и отстаёт на 90° от напряжения U (см. векторную диаграмму на рис. 3.29, б). Этот поток будет делиться на две части Ф1 и Ф2 . После того, как в систему установили КЗ-виток 5, сквозь него будет проходить поток Ф2 и индуцировать ЭДС EK . Эта ЭДС создаёт в витке ток IK , который отстаёт от своей ЭДС на угол ϕ и создаёт свой поток ФK .
|
|
|
Поскольку теперь |
сквозь виток 5 проходит суммарный поток |
||||||
|
|
K 2 = |
|
2 + |
|
K , то ЭДС |
|
отстаёт от этого потока на 90°. Поток |
|
изме- |
|
Ф |
Ф |
Ф |
EK |
Ф |
|||||
ниться не может, поскольку он создаётся обмоткой, подключённой к на-
4 0