

3.9. Силовий аналіз взаємодії робочого органу з шаром ґрунту
Сучасний напрям механізації сільськогосподарського виробництва передбачає створення комбінованих агрегатів нового покоління, здатних за один прохід виконати декілька технологічних операцій, при цьому перешкоджаючи виникненню ерозійних процесів і сприяючи ущільненню ґрунту.
Проведемо силовий аналіз взаємодії робочого органу з шаром ґрунту. Згідно теорії пасивного тиску грунту, передня робоча грань клину розглядається як підпірна стінка, що переміщається в напрямі масиву, а зусилля різання подібно до пасивної відсічі грунту при насуненні на нього підпірної стінки. При силовій взаємодії шара та робочого органу з боку грунту діє реакція Q недеформованого грунту. Напрям Q протилежний напряму зусилля різання, яке змінюється залежно від фізико-механічних властивостей грунту та параметрів робочого органу. На грунтах нормальної вологості звичайне зусилля різання співпадає по напряму із швидкістю агрегату, але на сухих і ущільнених грунтах воно відхиляється від горизонталі. Відомо, що із зміною вологості міняється сила тертя, тому розташуємо реакцію Q так, щоб враховувалися фізико-механічні властивості грунту, тобто Q відхиляється від нормалі до поверхні сколу на кут ρ (тертя грунту по грунту). Таким чином, при нормальній вологості (при певних значеннях ρ і ψ) зусилля різання співпадає по напряму із швидкістю агрегату.
Окрім реакції Q з боку грунту на робочий орган діє сила тяжіння пласта G; результуюча Rд елементарних нормальних сил опору грунту та сил тертя на поверхню робочого органу, що відхиляється від нормалі до поверхні на кут φ (тертя грунту по сталы); сила F1 обумовлена інерцією пласта грунту, направлена протилежно абсолютній швидкості руху пласта та створююча кут (90-ψ) з віссю OZ.
Для нормальної роботи робочого органу підпір шару грунту повинен бути достатнім:
![]() ,
(3.38)
,
(3.38)
де σв – тимчасовий опір стисненню;
S – площа поперечного перерізу шару.
Вирішуючи це рівняння відносно σв, отримаємо вираз, що визначає умову, при якій не виникає накопичення ґрунту перед робочим органом:
![]() .
(3.39)
.
(3.39)
Визначимо Q – реакцію недеформованого ґрунту (рис. 3.12):
![]() ;
(3.40)
;
(3.40)
![]() .
(3.41)
.
(3.41)

Рис. 3.12. Схема дії сил ґрунту на робочий орган
![]() .
(3.42)
.
(3.42)
Підставивши отриманий вираз (3.42) в рівняння (3.38) і виконавши деякі перетворення, отримаємо Q:
![]() (3.43)
(3.43)
Визначимо невідомі величини F і G. Для визначення сили інерції пласта F (динамічного тиску ґрунту на робочий орган) скористаємося теоремою зміни кількості руху:
![]() ,
(3.44)
,
(3.44)
![]() тоді
тоді
![]() або
або
![]() ,
(3.45)
,
(3.45)
де dm/dt – маса ґрунту, що поступає на робочий орган в одиницю часу.
Виразимо
масу шару через його об'єм, тоді при
![]() :
:
![]() ,
(3.46)
,
(3.46)
де γ – об'ємна вага (щільність ґрунту).
Тоді сила інерції пласта визначається за рівнянням:
![]() .
(3.47)
.
(3.47)
Силу тяжіння шару виразимо через об'єм:
![]() ,
(3.48)
,
(3.48)
де l – довжина долота.
![]() .
(3.49)
.
(3.49)
В отриманому виразі (3.49) ψ – кут зрушення визначається за рівнянням:
![]() .
(3.50)
.
(3.50)
Це рівняння виведене, виходячи з теорії міцності Мору, за якій руйнування шару відбувається в площині, де дією нормального та дотичного зусилля створюється напруга, рівна чистому зрушенню. Тобто всякий раз величина кута зрушення встановлюється такою, при якій сила різання буде мінімальною.
Підставивши рівняння (3.50) в (3.49) та виконавши деякі перетворення, отримаємо:
 (3.51)
(3.51)
З аналізу виразу (3.51) виходить, що вірогідність виникнення накопичення ґрунту перед робочим органом зростає із збільшенням довжини долота, щільності ґрунту, швидкості агрегату; залежить від його фізико-механічних властивостей та кута кришення, але не залежить від поперечного перерізу шару. За допомогою отриманого виразу (3.51) визначимо кут кришення β та довжину долота, при яких процес обробітку ґрунту буде найменше енергоємним, тобто за відсутності накопичення ґрунту перед робочим органом.
Отримані залежності представлені графічно на рис. 3.13. З аналізу отриманих кривих виходить, що при зміні β від 10º до 30º і l від 0,1 м до 0,3 м опір ґрунту стисненню σв починає різко зростати при куті різання β = 20º.
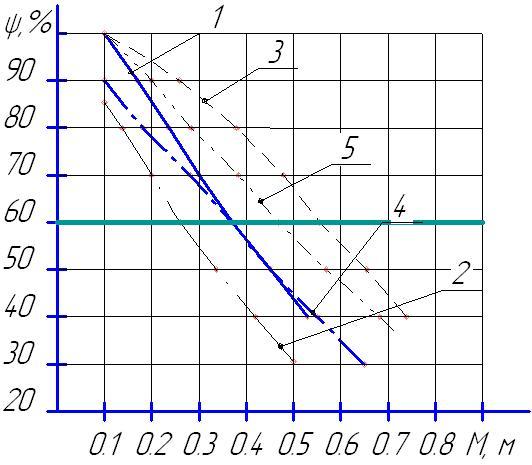
Рис. 3.13. Залежність відстані між робочими органами від
ступеня розпушення ґрунту
Аналіз отриманих даних, свідчить про те, що для кращого розпушення чорноземного сухого ґрунту робочий орган повинен розташовуватися під кутом кришення β = 20-25º до дна борозни і мати довжину долота l = 0,2 м при заданих агротехнічних вимогах, щільності ґрунту та швидкості руху агрегату.