

KS_tema_9 (1)
.pdf306 |
Методы решения задач динамической оптимизации |
После приведения подобных в правой части этого выражения, оно приобретает вид
ln kt ln 1 ln(1 ) (1 ) ln kt
Теперь осталось приравнять коэффициенты при одинаковых функциях в правой и левой части выражения:
ln 1 ln(1 )
(1 ) .
Отсюда,
|
|
, |
(***) |
|
|||
|
1 |
|
|
тоже находится единственным образом. Таким образом, мы доказали, что наша догадка о виде функции V () была верной. Более того мы её точно знаем.
Из (**) и (***) следует, что оптимальное правило для капитала имеет вид
kt 1 kt .
Значит, оптимальное правило для выбора потребления (из ct kt kt 1 ) есть
ct (1 )kt .
То есть оптимальные потребление и инвестиции (которые при полном выбытии капитала совпадают с количеством капитал) составляют постоянную во времени долю выпуска.
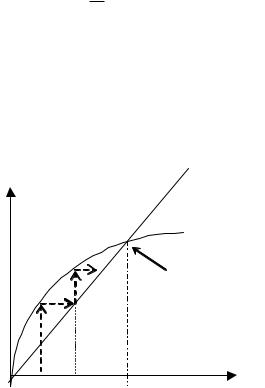
Уравнение движения равновесного капитала можно графически представить на Рис. 9.1.
И графически (из Рис 9.1), и алгебраически (с помощью уравнения движения равновесного движения капитала (***)) легко показать, что для любого положительного значения начального капитала, динамика модели приводит к устойчивому значению капитала kss , которое находится из (***) (когда kt 1 kt kss ), как
Методы решения задач динамической оптимизации |
307 |
1
kss ( )1 .
То есть эта экономика не характеризуется долгосрочным ростом, а сходится к устойчивому состоянию, в котором капитал, потребление и выпуск постоянны во времени.
kt+1 |
|
kt+1=kt |
|
|
|
|
|
|
|
k |
k |
|
|
t 1 |
t |
|
|
глобально устойчивое |
|
|
|
состояние |
|
k0 |
k1 |
kss |
kt |
|
|||
|
|
||
Рис. 9.1. Графический поиск устойчивогосостояния в моделиоптимального роста
Имея значения капитала в устойчивом состоянии, легко посчитать устойчивый уровень потребления и выпуска, которые, соотвественно, равны
css |
(1 ) |
|
, yss |
|
|
. |
|
|
|||||
|
1 |
|
1 |
|
||
9.2.3 Характеристика оптимального решения задачи, записанной в функциональной
форме
Если функция V () в (9.4) дифференцируема (условия, при которых она дифференцируема установили Бенвенисте и Шейнкман (1979) ) и вогнутая, решение задачи социального планирования можно характеризовать при помощи условий первого порядка.
308 Методы решения задач динамической оптимизации
Выразим ct из ограничения (9.5) и подставим в целевую |
функцию, заданную |
|
выражением (9.4), и получим |
|
|
V (kt ) max u f (kt ) (1 )kt |
kt 1 V (kt 1 ) |
(9.9) |
kt 1 |
|
|
k0 - задано.
Тогда условия первого порядка для задачи максимизации, записанной в правой стороне
(9.9), имеют вид
u f (kt ) (1 )kt |
kt 1 V (kt 1 ) 0 |
(9.10) |
Тем не менее, не зная V () , мы не можем знать V () и не можем решить уравнение
(9.10) относительно оптимального выбора kt* 1 . Поэтому необходимо ещё одно условие оптимального решения, следующее из (9.10), дающее вид функции V () . Это условие можно получить, продифференцировав обе части выражения (9.10) по переменной состояния kt , предварительно предположив, что в правую часть (9.10) уже подставлено оптимальное правило поведения kt* 1 (kt ) , то есть
V (kt ) u f (kt ) (1 )kt kt* 1 (kt ) V (kt* 1 (kt )) .
Используя Теорему об огибающей, мы получаем
V (kt ) u f (kt ) (1 )kt |
kt 1 f (kt ) (1 ) . |
(9.11) |
Чтобы понять, как получено (9.11), надо понять теорему об огибающей.
Предположим, что унас есть
g(x) max F(x, y) |
(9.12) |
y |
|
и y* (x) оптимальной правило, которое максимизирует правую часть (9.12), то есть
g(x) F(x, y* * (x)). |
(9.13) |
Методы решения задач динамической оптимизации |
309 |
Если мы теперь возьмем производную по x от правой и левой части выражения (9.13), мы
получим
|
dg |
|
F |
|
F dy* |
|
dF |
, |
||||
|
|
|
|
|
|
|
|
|||||
|
dx |
x |
y dx |
dx |
||||||||
|
|
|
|
|
|
|||||||
так как |
F |
0 в точке y* , поскольку y* доставляет максимум значению функции F (см. |
||||||||||
|
||||||||||||
y
(9.12)). Наконец, то, что мы рассматривали в (9.9), абсолютно аналогично (9.12).
В итоге мы имеем два уравнения характеризующие оптимальное решение нашей задачи: первое уравнение, следующее из условия первого порядка, (9.10), и второе,
следующее из теоремы об огибающей, (9.11):
u f (kt ) (1 )kt kt 1 V (kt 1 ) 0
V (kt ) u f (kt ) (1 )kt kt 1 f (kt ) (1 )
Второе уравнение можно записать для будущего периода t 1 и подставить, полученное
выражение для V (kt 1 ) в первое уравнение:
V (kt 1 ) u f (kt 1 ) (1 )kt 1 kt 2 f (kt 1 ) (1 ) ,
чтобы получить
|
|
|
|
|
|
|
|
|
u f (kt |
) (1 )kt |
kt 1 |
|
u f (kt 1 ) (1 )kt 1 |
kt 2 |
f (kt 1 ) (1 ) 0 , (9.14) |
||
|
|
|
|
|||||
|
|
ct |
|
|
|
ct 1 |
|
|
или иначе
u (ct ) |
f (kt 1 ) (1 ) , |
(9.15) |
|
u (ct 1 ) |
|||
|
|
что есть уже хорошо знакомое нам уравнение Эйлера, задающее межвременной выбор потребления.

310 |
Методы решения задач динамической оптимизации |
Итак, решение задачи социального планирования, то есть Парето оптимальное решение, а следовательно, и набор последовательностей для потребления и капитала,
соответствующий равновесному решению в силу выполнения первой и второй теорем благосостояния, полностью задан условиями (9.15), (9.5), (9.6) для любого периода t :
u (ct ) f (kt 1 ) (1 ) u (ct 1 )
ct kt 1 f (kt ) (1 )kt k0 - задано.
Используя эти условия, можно без труда посчитать устойчивое состояние
(динамическое равновесие) модели, kt kss , t :
1
f (kss ) 1 .
То есть равновесное количество капитала в устойчивом состоянии зависит только от коэффициента дисконтирования полезности и от коэффициента выбытия капитала.
Методы решения задач динамической оптимизации |
311 |
Основные понятия Темы 9
Задача динамической оптимизации в непрерывном времени.
Переменная контроля. Переменная состояния. Закон движения переменной состояния.
Гамильтониан. Условия трансверсальности.
Гамильтонианы текущего и приведенного значения целевой функции.
Задача динамической оптимизации в дискретном времени.
Модель оптимального роста.
Задача социального планирования.
Задача в последовательной форме.
Задача в функциональной форме.
Уравнение Беллмана. Переменные контроля. Переменные состояния.
Неподвижная точка сжимающего отображения.
Метод «Угадай, но проверяй».
Итеративно-аналитический метод.
Итеративно-численный метод.
Теорема об огибающей.
312 |
Методы решения задач динамической оптимизации |
Литература к Теме 9
Основная:
Vinogradov, V.1999, A cook-book of mathematics, CERGE-EI lecture notes, CERGE-EI Stokey, N, Lucas, R. and E. Prescott, 1989, Recursive methods in economic dynamics, Harvard University Press