

30
Для трехосного автомобиля-тягача tgβ = (XT – XT0)/RT, а значения XT, XT0 (смещение полюса поворота при VT = 0) и RТ вычисляются также по формулам анализа поворота трехосного автомобиля – тягача.
4.4. Критическая (граничная) скорость движения СТС по вилянию прицепа
При достижении определенной скорости (35…40 км/ч и выше) у прицепа возникают поперечные колебания в горизонтальной плоскости – виляние прицепа. В результате этого явления увеличивается ширина полосы движения автопоезда, что отрицательно сказывается на безопасности движения – появляется опасность заноса прицепа и схода его с дороги; затрудняется управление автопоездом; повышаются нагрузки на крюке и расход топлива; увеличивается износ шин и шарнирных соединений, участвующих в движениях, вызываемых вилянием прицепа.
Виляние прицепа возникает как следствие его начального отклонения, причинами которого могут быть: выход автопоезда из поворота; движение прицепа с уводом при наличии поперечного уклона дороги; наезд его колеса на препятствие и боковой удар; боковой ветер.
Для анализа рассматриваются поперечные колебания одноосного прицепа или полуприцепа при следующих допущениях:
сцепка прицепа с тягачом жесткая и беззазорная; колебаниями прицепа в вертикальной плоскости пренебрегаем; движение в точке сцепки прямолинейно.
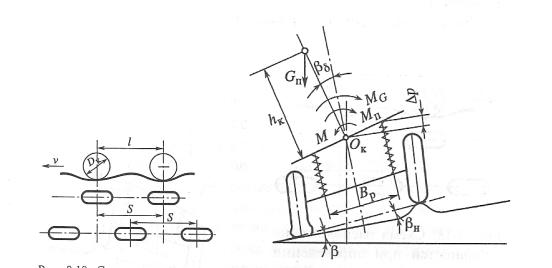
На рис.16 показана расчетная схема одноосного прицепа при отклонении его продольной оси на угол αГ от направления прямолинейного движения точки сцепки 0, где РСХ и РСУ – соответственно продольная и поперечная составляющие силы на крюке; РКП – сила сопротивления движению прицепа; RУ – поперечная реакция колес прицепа.
Точка П прицепа (середина моста) участвует в двух движениях – в переносном (продольном) со скоростью V точки 0 и относительном – колебании относительно 0 с угловой скоростью α′Г = dα/dt.
Линейная относительная скорость точки П будет VОП = Lα′Г. Суммарная скорость точки П равна VП = V +VОП и составляет с
плоскостью вращения колес угол увода δ. Этот угол увода равен сумме двух углов - δ = δα + δОП (δОП возникает в результате колебаний прицепа со скоростью VОП). Учитывая малость углов δα и δОП, можно
считать, что
δОП = VОП/V и δ = δα + δОП = VОП/V + αГ или δ = Lα′Г/V + αГ.
Поперечная реакция колес прицепа
RY = КУδ = КУ(Lα′Г/V + αГ),
где КУ – коэффициент сопротивления уводу оси прицепа.
31
Реакцию колес прицепа RY можно представить двумя составляю-
щими
RY = KYLα′Г/V + KYαГ = RYα + RYα.
Рис.16. Схема действия сил на одноосный прицеп (полуприцеп) при его случай-
ном отклонении от продольной оси автомобиля-тягача
Составляющая RYα = KYαГ направлена в сторону равновесного положения прицепа. Она идентична упругой восстанавливающей силе при свободном колебании массы на пружине. Коэффициент КУ аналогичен коэффициенту жесткости пружины, а αГ – линейному перемещению массы. Составляющая RYα = KYLα′Г/V имеет направление, противоположное скорости VОП, и идентична силе сопротивления, пропорциональной скорости.
Составим уравнение движения центра масс прицепа относительно точки 0
(JZ + mПС2)d2αГ/dt2 = - RYL, |
(51) |
где JZ – момент инерции прицепа относительно центра масс (точка С); |
|
(JZ + mПС2) – момент инерции прицепа относительно точки 0. |
|
Подставляя значение RY в уравнение (51), после преобразований |
|
получим уравнение свободных колебаний прицепа |
|
d2αГ/dt2 + (dαГ/dt)КУL2/V(JZ + mПС2) + αГКУL/(JZ + mПС2) = 0. |
(52) |
32
Принимая для двухосного полуприцепа метод, аналогичный использованному применительно к одноосному, получим уравнение движения двухосного прицепа
d2αГ/dt2 + (dαГ/dt)[КУП (L – ℓ)2 + KYBL2]/V(JZ + mПС2) + + αГ[КУП (L – ℓ)+KYBL]/(JZ + mПС2) = 0,
которое отличается от уравнения (52) только коэффициентами.
При условии КУП = КУВ = КУ формула для определения граничной по затуханию скорости принимает вид
VГ = 0,5[(L- ℓ)2 + L2] √KY/(JZ + mПС2)[(L- ℓ) + L].
Следовательно, все относящееся к анализу свободных колебаний одноосного прицепа может быть распространено и на двухосный прицеп (полуприцеп), а также n-осное прицепное звено с учетом его особенностей.
Критическая скорость по вилянию прицепа VКР.ПР определяется заездами автопоезда по прямолинейному участку дороги с асфальтобетонным покрытием с последовательным увеличением скорости движения и записью траектории движения прицепа. Скорость движения прицепа при достижении размаха колебаний траектории прицепа, на 6% превышающего его ширину, считается критической VКР.ПР.
4.5. Динамическая устойчивость сочлененных многозвенных ТС при движении на поворот
При криволинейном движении (движении на повороте в плане) динамическая устойчивость ТС оценивается для двух случаев движения: криволинейное движение (поворот) ТС на дороге с твердым покрытием и поворот с малым радиусом [R = (1,3 …1,5)Rmin] на разбитой грунтовой дороге c углом уклона дороги 10…120 и скоростью движения до 10 км/ч.
При расчете определяется опрокидывающий момент МОП от центробежной силы, составляющей силы тяжести и ветровой нагрузки и восстанавливающий момент МВ от составляющей силы тяжести с учетом поворота подрессоренной массы относительно оси крена при упругой деформации подвески. Динамическая устойчивость оценивается коэффициентом запаса устойчивости КУ, который по требованию Госгортехнадзора должен быть не ниже 1,26 (КУ = МВ/МОП).
При повороте ТС с установившейся скоростью на него будет действовать только центробежная сила, а при входе в поворот с ускорением - инерционные силы в продольном и поперечном направлениях и инерционный момент, что с точки зрения боковой устойчивости является самым неблагоприятным случаем нагружения ТС. К динамической устойчивости ТС относится также и устойчивость против заноса, определяемая в зависимости от величины сцепления колес с дорожным покрытием.

33
Рис.17. Зависимость изменения угловой скорости складывания звеньев по условию опрокидывания или заноса при различных углах складывания секций:
1 - θ = 0,04 рад; 2 - θ = 0,14 рад; 3 - θ = 0,27 рад; 4 - θ = 0,4 рад
Параметры системы поворота во многом определяют свойства поворотливости, поворачиваемости, управляемости и устойчивости. Так, управляемость и устойчивость зависят от передаточного числа системы поворота. Для обеспечения хорошей управляемости рекомендуется, чтобы общее передаточное число
u = α′max/θ′max = 25…33,
где α′max = 10 рад/с, θ′max = 0,3…0,4 рад/с – предельная угловая скорость относительного поворота звеньев сочлененного ТС по условию
опрокидывания или бокового заноса (рис.17).
Допустимая предельная угловая скорость складывания зависит как от скорости движения, так и от конечного угла складывания θ.
Следует отметить, что приведенные рекомендации разработаны для двухосных сочлененных ТС с шинами большого диаметра и большой жесткости. Поэтому для ТС других типов эти рекомендации требуют проверки. Кроме того, требуется разработка конструкции и оценка эффективности введения в систему упругой и демпфирующей связей для гашения колебаний, нарушающих курсовую устойчивость движения.
Важной характеристикой поворота сочлененного ТС является максимальный угол складывания звеньев. Он определяет: с одной стороны, требующийся радиус поворота звеньев, который должен быть минимальным; с другой стороны, - расстояния от оси сцепного устройства до секций, которые также должны быть минимальными. Выбор этого угла является оптимизационной задачей.

34
Приложение
Решение задач по устойчивости ТС
Таблица 1П Исходные данные для расчета поперечной устойчивости ТС
Обознач. |
Наименование |
Вели- |
Размер- |
параметра |
параметра |
чина |
ность |
|
|
|
|
ma |
Масса транспортного средства |
|
кг |
mП |
Подрессоренная масса ТС |
|
кг |
В |
Колея |
|
м |
ВР |
Рессорная база |
|
м |
hq |
Высота расположения центра масс |
|
м |
hК |
Высота расположения оси крена |
|
м |
|
(деформация подвески) |
|
м |
hШ |
Высота расположения оси крена |
|
|
|
(деформация шин) |
|
Н/м |
СР |
Жесткость подвески (радиальная) |
|
|
СШ |
Жесткость шин (радиальная) |
|
Н/м |
rСТ |
Статический радиус колеса |
|
м |
βН |
Высота периодической неровности |
|
м |
Задача № 1. Определение максимального угла статической по-
перечной устойчивости на косогоре
Примечание. При решении задач принимаем, что мгновенный центр крена ТС переднего и заднего ходовых частей расположен на одном уровне от опорной поверхности; величина коэффициентов скольжения и качения всех колес постоянная.
Порядок расчета
1.Определение максимального угла статической поперечной устойчивости
tgβmax = 0,5B/hg
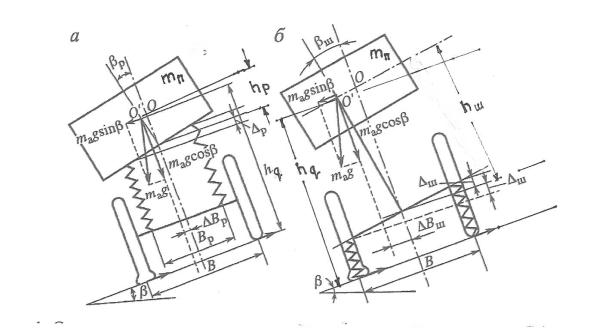
2.Определение угла статической поперечной устойчивости с учетом деформации подвески и шин.
Расчет проводится по формулам: при упругой деформации подвески
tgβРmax = 0,5B/hg – mпg hК2sinβ/( 0,5hgCpBpB 2);
при упругой деформации шин
tgβШ.max = 0,5B/hg - mпghш2sinβ/hgCш0,5В2,
35
Расчет проводится методом последовательного приближения: последовательной подстановкой принятых для расчета величин угла β от минимального до βmax.
Рис.1П. Схема определения статической поперечной устойчивости ТС на косогоре при упругой деформации подвески и шин:
а– положение ТС при деформации упругих элементов подвески;
б– положение ТС при радиальной деформации шин
3.Наибольший угол поперечной устойчивости tgβ1max определяется как разность между максимальным углом поперечной устойчивости и суммой поперечных углов с учетом деформации подвески и шин: tgβ1max = tg(βР + βШ).
4. Предельный угол наклона ТС, учитывающий тангенциальную упругую деформацию шин, определяется по формуле
tgβШςmax = (0,5B - mgsinβ/ CШς)/hg.
5.При скольжении ТС максимальный угол поперечной статической устойчивости определяется из условия равенства поперечной составляющей силы тяжести и суммарной поперечной реакции колес максимальной по сцеплению
tgβϕY = ϕY,
где ϕY – коэффициент сцепления колес в поперечном направлении (ϕY – задается в зависимости от характеристики опорной поверхности).
36
Задача № 2. Определение поперечных колебаний ТС, движущегося по неровностям
Порядок расчета 1.Расчет критической скорости, определяющей возможность опро-
кидывания ТС (рис.2П,а).
Критическая скорость опрокидывания рассчитывается по формуле
Vкр=(S√CY/JY)/2π. [м/с]
а б
Рис.2П. Схема определения динамической поперечной устойчивости
ТС при движении по неровностям:
а - схема определения критической скорости; б - схема определения максимального угла поперечной раскачки ТС
S – длина волны дорожных неровностей, принимается для одноосного полуприцепа равной S = 2DK.СТ, где DK.СТ – статический диаметр колеса. Частота вынужденных возмущений дорожных неровностей ν = 2πV/S; Су – приведенная угловая жесткость упругих элементов одного борта. В зависимости от заданной схемы подвески угловая жесткость подсчитывается по одной из формул (4), (5), или (6) рис.5; Jу – полярный момент инерции подрессоренных масс относительно продольной оси, величина которого рассчитывается по фор-
муле
Jy = mп(B02 + H02)/12,
где В0 и Н0 – соответственно габаритная ширина и высота подрессоренной части ТС.
2. Расчет угла поперечной раскачки подрессоренной массы многоосного ТС при движении по неровностям (рис.2П,б).
Расчет проводится для случая движения по неровностям, расположенным в шахматном порядке со сдвигом относительно друг друга
37
на 1800, т.е. на величину π. При резонансе ν = ωУ и ϕ = 0,5π угол попе-
речных колебаний подрессоренной массы будет максимальным
βδmax = βН/(n - GПhKcosγП/0,5CPBPB 2P )γ;
где γ = 2K/ωУ; 2K = 0,5μd2Jу; ωУ2 = (0,5СРВР2n - GПhK cosγП)/Jу; ωУ - соб-
ственная частота поперечных колебаний ТС; βН – угол между высотой неровности и поверхностью косогора на расстоянии колеи; СР – вертикальная жесткость упругих элементов подвески; ВР – рессорная база; n – число осей ТС; GП – сила веса подрессоренной массы; hK – плечо крена; μ - коэффициент сопротивления демпфирующих элементов; d – расстояние между демпфирующими элементами (принимается равным рессорной базе); Jу – полярный момент инерции подрессоренных масс относительно продольной оси, величина которого может быть
подсчитана по формуле
Jy = mп(B02 + H02)/12,
где В0 и Н0 – соответственно габаритная ширина и высота подрессоренной части ТС. Угол поперечного статического наклона ТС, равный
γП = β + βР + βШ,
где βК и βШ – соответственно углы наклона к горизонту подрессоренной массы за счет деформации подвески и шин, β - угол уклона поверхности дороги (косогора) или на горизонтальной дороге угол, образованный высотой (впадиной) дорожной неровности по колее машины.
Примечание Для получения сравнительных данных необходимо провести расчет
угла раскачки ТС для следующих случаев:
принять cosγП = 1, считая угол γП (уклон дороги, высоту неровности и наклон подрессоренной массы за счет деформации подвески и шин) небольшим; принять угол γП равным углу βН (задается в исходных данных высотой
неровности), образуемому высотой (глубиной) неровности и колеей ТС, считая суммарный угол наклона ТС за счет упругой деформации подвески и шин равным нулю; принять угол γП равным рассчитанному в задаче №1, обусловленному
деформацией подвески и шин. Расчет провести последовательно: принимая вначале угол наклона обусловленный только деформацией подвески, а затем – только деформацией шин.
Величину частоты поперечных собственных колебаний рассчитывают по формуле ωУ = √Су/Jу.
38
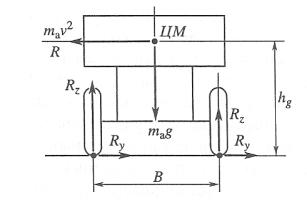
Задача № 3. Определение поперечной устойчивости ТС, движущегося на повороте
Определение предельной скорости установившегося криволинейного движения автопоезда по опрокидыванию на криволинейном участке дороги радиуса R без учета деформации подвески и шин проводится по формуле
VКР = √0,5magBR/hg = 2,21√BR/hg
Критическая скорость с учетом влияния жесткостей упругих элементов подвески и шин определяется по формуле
VКР=2,21√BR/[hg+h2KPmП/(0,5СРВР2)+h2ШmП/(0,5СШВ2)+mа/СШ],
где hKP, hШ – плечо крена подрессоренной массы при деформации подвески и шин соответственно; mП – масса подрессоренная; СР, ВР – жесткость подвески и база между упругими элементами соответственно; СШ, В – жесткость шин и колея соответственно; mа – масса ТС, R – радиус поворота.
Рис.3П. Схема определения динамической поперечной устойчивости ТС при движении на повороте: определение критической скорости опрокидывания и устойчивости ТС при скольжении
Предельная (критическая) скорость установившегося криволинейного движения по сцеплению приближенно определяется из условия равенства поперечной составляющей центробежной силы инерции и суммарной боковой реакции всех колес ТС, максимальной по сцеплению
VКРϕ = √gϕУR = 3,13√ϕУR,
где ϕУ – коэффициент сцепления колес с опорной поверхностью в боковом (поперечном) направлении дороги; g – ускорение свободного падения.
39
Литература
1.Гладов, Г.И. Специальные транспортные средства. Проектирование и конструкции: учебник для вузов /Г.И. Гладов, А.М. Петренко; под ред. Г.И. Гладова. – М.: ИКЦ «Академкнига», 2004. – 320 с.: ил.
2.Гладов, Г.И. Специальные транспортные средства: Теория: учебник для вузов /Г.И. Гладов, А.М. Петренко; под ред. Г.И. Гладова. – М. ИКЦ «Академкнига», 2006. – 215 с.: ил.
3.Литвинов, А.С. Автомобиль: Теория эксплуатационных свойств: учебник для вузов по специальности «Автомобили и автомобильное хозяйство» / А.С. Литвинов, Я.Е. Фаробин. – М.: Машиностроение, 1989. – 240 с.: ил.
4.Смирнов, Г.А. Теория движения колесных машин: учебник для вузов /Г.А. Смирнов. - 2-е изд., доп. и перераб. – М.: Машиностроение, 1990. -352 с.
40
Оглавление Введение………………………………………………………………….3
1. Общие понятия, оценочные показатели устойчивости СТС….3 2. Статическая поперечная устойчивость…………………………..7
2.1.Определение параметров ТС, влияющих на поперечную устойчивость…………………………………………………………… 7
2.2.Влияние подвески и ее кинематики на перераспределение вертикальных реакций на колесах…………………………………. ..8
2.3. Определение угловой жесткости подвески…………… … .12
2.4.Определение положения центра масс (центра тяжести)…. .13
2.5.Определение поперечной устойчивость ТС
на косогоре…………………………………………………………… …15 3. Влияние конструктивной схемы СТС на поперечную устойчивость…………………………………………………………… 19 3.1.Конструктивные опорные схемы СТС………………………... 19 3.2. Четырехопорная схема………………………………………… 20
3.3. Трехопорная схема…………………………………………… |
22 |
3.4. Влияние деформации грунта……………………………… … |
23 |
4. Динамическая поперечная устойчивость СТС……………… |
24 |
4.1. Поперечная устойчивость СТС при прямолинейном |
|
движении по неровностям……………………………………… .. . 24 4.2. Предельная (критическая) скорость установившегося криволинейного движения……………………………………… … ..28 4.3.Угол дрейфа……………………………………………………… ..29 4.4. Критическая (граничная) скорость движения СТС по вилянию прицепа…………………………………………… .30 4.5. Динамическая устойчивость сочлененных
многозвенных ТС при движении на поворот. …………………… 32
Приложение ……………………………………………………… …. ..34 Литература…………………………………………………… …… …..39
41
Учебное издание
ПЕТРЕНКО Александр Михайлович
УСТОЙЧИВОСТЬ СПЕЦИАЛЬНЫХ ТРАНСПОРТНЫХ СРЕДСТВ
Учебное пособие
Редактор Н.П. Лапина
Подписано в печать ………………..г. Формат 60х84/16. Бумага офсетная.
Усл. печ. л. 2,6..Уч. изд. л…2,1……….
Тираж 100……..экз. Заказ……….
Цена 45 .руб.
Ротопринт МАДИ.
125319, Москва, Ленинградский проспект, 64