

учебник Кузнецова 2003
.pdfВ.Г.Воробьев, С.В.Кузнецов АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ПОЛЕТОМ САМОЛЕТОВ
δСАУн = F |
|
[k |
|
(M)(σωz |
+σ∆ny |
+σγ |
+σH ) + |
дит к потере демпфирования продольных траекторных колебаний само- |
|||||||||||||||||||||||||||||||||||||||||
в |
|
σв |
σв |
|
|
|
|
в |
|
|
|
в |
|
|
в |
в |
|
|
лета по высоте. Пассивный отказ по сигналу отклонения самолета от |
||||||||||||||||||||||||||||||
|
+σбал |
], |
σωz = k |
|
|
(M) ω , |
|
|
|
|
заданной высоты приводит к потере режима стабилизации высоты и |
||||||||||||||||||||||||||||||||||||||
|
ω |
|
|
|
|
САУH начинает работать как автопилот угла тангажа. |
|
||||||||||||||||||||||||||||||||||||||||||
|
в |
|
|
|
|
в |
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
(T |
|
p +1) |
|
|
Tn |
p |
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Отказ САУH по цепи согласования текущей высоты и получения |
|||||||||||||||||||||||||||||||||||
σ∆ny |
= F |
|
kϑ |
|
ϑ |
1 |
|
|
|
|
|
|
|
|
у |
|
[ϑ− F |
|
ϑ ], (10.2) |
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
в |
ωz |
|
∆ny |
(Tϑ 2 p +1) |
|
(Tnу p +1) |
ϑ |
|
0 |
опорного значения высоты может сопровождаться грубым включением |
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
режима с недопустимо большими отклонениями рулей высоты. |
|
||||||||||||||||||||||||||||||||||||||
|
|
|
1−cos γ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
γ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Погрешность измерения угловой скорости ωz в виде дрейфа нуля |
|||||||||||||||||||||||||||||||
σв = Fγγ = |
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
cos γ |
|
|
|
|
|
|
|
|
|
|
|
|
|
εω |
приводит к появлению статической ошибки по высоте, |
опреде- |
||||||||||||||||||||||||||||||||
|
σвH = kH [(H − H0 ) − Hзад] + kV Vy + ka |
|
ay , |
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
ляемой из закона управления (10.1): |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kω |
|
|
|
|
|
||
|
σбал |
= F |
|
(∆n |
|
|
, σбал |
, δ |
|
) . |
|
|
|
|
|
k |
|
ε |
|
|
− k |
|
|
∆H |
|
= 0, ∆H |
|
|
= |
|
|
ε |
|
|
|
||||||||||||||
|
|
y |
зак |
|
|
|
|
|
ω |
ω |
|
H |
уст |
уст |
|
|
z |
|
ω |
. |
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
в |
|
|
бал |
|
|
|
в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kH |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
||||
Назначения и структура составляющих закона управления по уг- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
При |
|
|
типичных |
значениях |
|
|
|
|
передаточных |
чисел |
||||||||||||||||||||||||||||||||||||||
ловой скорости тангажа σвωz , |
углу крена σвγ |
и балансировке σвбал |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
kω |
= 0,5; |
|
kH = 0,02 |
и величине |
|
дрейфа |
|
εω |
=1°/ c |
устано- |
|||||||||||||||||||||||||||||||||||||||
аналогичны назначению и структуре составляющих закона управления |
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|||||||||||||||||||||
вившаяся ошибка по высоте достигает 25м. |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
цифроаналогового автопилота угла тангажа. |
|
|
|
|
|
εϑ |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
Составляющая закона управления по избыточной нормальной пе- |
|
Погрешность измерения угла тангажа |
|
приводит к появлению |
|||||||||||||||||||||||||||||||||||||||||||||
регрузке σв∆ny |
обеспечивает управление углом тангажа через контур |
статической ошибки по высоте, определяемой из закона управления |
|||||||||||||||||||||||||||||||||||||||||||||||
нормальной перегрузки без статических ошибок благодаря наличию |
(10.1): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|||||||||||||||||||||||
изодромного звена с постоянной времени T |
. |
|
|
|
|
ε |
|
|
− k |
|
∆H |
|
|
= 0, |
∆H |
|
= ε |
|
|
|
. |
|
|
|
|
|
|||||||||||||||||||||||
Составляющая закона |
|
|
|
|
|
|
|
|
|
|
n у |
|
|
|
обеспечивает |
|
|
ϑ |
|
|
H |
|
|
уст |
|
|
|
уст |
|
|
ϑ kH |
|
|
|
|
|
|||||||||||||
|
управления по высоте σH |
|
При εϑ =1° установившаяся ошибка по высоте достигает 50м. |
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в |
|
|
|
|||||||||||||||||||||||||||
управление продольной траекторией полета самолета. Для улучшения |
|
Неточность измерения высоты εн |
полностью переходит в устано- |
||||||||||||||||||||||||||||||||||||||||||||||
качества переходных процессов она содержит также сигналы, пропор- |
|
||||||||||||||||||||||||||||||||||||||||||||||||
циональные вертикальной скорости |
|
V |
и вертикальному ускорению |
вившуюся ошибку стабилизации высоты. Такие ошибки для современ- |
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
ных аналоговых корректоров высоты составляют до 0,1% от диапазона |
|||||||||||||||||||||||||||
ay . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
измерения высоты, т.е. до 10м на высоте 10км. |
|
|
|
|
|
|||||||||||||||||||||||
Структурная схема САУНny |
|
, реализующей закон управления |
|
Зона нечувствительности сервопривода руля высоты, приведенная |
|||||||||||||||||||||||||||||||||||||||||||||
|
к углу тангажа и составляющая до 0,5° , приводит к статическим |
||||||||||||||||||||||||||||||||||||||||||||||||
(10.12) представлена на рис. 10.9. Так работает САУ-96. В САУ-204 |
ошибкам по высоте до 30м. Таким образом, суммарная погрешность |
||||||||||||||||||||||||||||||||||||||||||||||||
формируется только сигнал, пропорциональный (∆nу)зад . Формиро- |
стабилизации высоты с помощью |
САУH может достигать десятков |
|||||||||||||||||||||||||||||||||||||||||||||||
вание разности |
(ny −(∆ny )зад) и управления на руль высоты осу- |
метров. Разрегулировки передаточных коэффициентов закона управле- |
|||||||||||||||||||||||||||||||||||||||||||||||
ния снижают качество переходных процессов и точность управления. |
|||||||||||||||||||||||||||||||||||||||||||||||||
ществляется в АСШУ-204. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10.1.2. Моделирование управления продольным траекторным |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
движением самолета на маршруте |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Реакция замкнутой системы «самолет - САУH » на управ- |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ляющие воздействия. |
Дополним модель вынужденного продольного |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
короткопериодического движения самолета (3.19) уравнением траек- |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
торного движения самолета по высоте. Пусть управляющее воздействие |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
на руль высоты создает САУH . Управляющее воздействие по высоте |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
формируется пилотом с помощью задатчика высоты с пульта управле- |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ния |
САУH . Тогда модель замкнутой системы “самолет - САУH ” |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
будет содержать уравнение состояния, уравнения выхода и входа, а |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
также закон управления САУH : |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Функциональная схема цифроаналоговой САУаy представлена
на рис. 10.10. Заданное значение нормального ускорения формирует вычислительная система самолетовождения ВСС. В структурной схеме рис. 9.14 при включении режима полета по сигналам ВСС выключатель переходит в положение “ВСС”.
Эксплуатационные особенности. Пассивные и активные отказы
САУH в контуре сервопривода и тангажа по последствиям аналогич-
ны соответствующим отказам автопилота угла тангажа. Кроме того, они приводят к отключению режима автоматической стабилизации и управления высотой. Пассивный отказ по сигналу угла тангажа приво-
xпкт(t) = Aпктxпкт(t) + Bпкту uпкту (t) , (10.13) yпкт(t) = xпкт (t) , (10.14)
uпкту (t) = ∆δвСАУН (t) , (10.15)
δСАУв Н (t) = DСАУпкт Н yпкт(t) + EСАУпкт Н ∆Нзад(t) , (10.16)
|
|
|
|
|
|
|
|
|
где |
|
|
|
|
|
|
|
∆ω (t) |
|
|
|
|
|
aωz ,ωz |
aωz ,α |
0 |
0 |
|||
|
|
z |
|
|
|
|
|
|
|
|
|
aα,α |
0 |
|
|
∆α(t) |
|
|
|
|
|
aα,ω |
0 |
||||||
xпкт |
(t) = |
|
|
, |
|
Aпкт |
= |
|
z |
|
|
, |
||
∆ϑ(t) |
|
|
|
0 |
0 |
|||||||||
|
|
|
|
|
|
|
|
aϑ,ωz |
0 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆H(t) |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
0 |
aH,α |
aH,ϑ 0 |
|||
|
|
|
|
|
|
|
|
aω ,δ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
в |
|
|
|
|
|
|
|
|
B |
y |
|
= |
|
0 |
|
, |
|
|
|
|
|
|
|
пкт |
|
0 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
71 |
май 2003г. |

Глава 10. УПРАВЛЕНИЕ ТРАЕКТОРНЫМ ДВИЖЕНИЕМ НА МАРШРУТЕ
DпктСАУн =[kω |
0 kϑ kϑ kϑH ] , EпктСАУн |
= −kϑ kϑH . |
z |
|
|
Получим вектор передаточных функций замкнутой системы “самолет - САУH ” по параметрам продольного короткопериодического и траекторного движения на управляющее воздействие по высоте
WСАУН (p) = |
Yпкт (p) |
= |
|
||
пкт |
∆Нзад(p) |
|
|
|
=(Ip − Aпкт −Bпкту DпктСАУН )−1Bпкту ЕпктСАУН =
=ФСАУпкт Н (p)Bпкту ЕСАУпкт Н . (10.17)
Переходная матрица состояния по параметрам продольного короткопериодического и траекторного движения самолета при включенной
САУH
ФСАУпкт Н (p) = (Ip − Aпкт −Bпкту DпктСАУН )−1 = (φСАУпкт Н (p))−1 .
Переходную матрицу состояния ΦСАУпкт Н (p) определим следующим образом:
|
{φСАУН (p)} |
|||
ФпктСАУН (p) = |
|
пкт |
пр |
, |
|
φпктСАУН (p) |
|
||
|
|
|
|
|
где {φСАУпкт Н (p)}пр - присоединенная матрица.
WСАУН (p) = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
пкт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p2 (p −аα,α ) aω ,δ kϑ kϑH |
|
|
|
|
|
||||||||||
|
|
|
|
|
− |
|
|
|
|
|
|
z |
в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆САУН (p) |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
p2aα,ω |
aω ,δ kϑ kϑH |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
− |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
z |
|
z в |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
∆САУН (p) |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
= |
|
|
|
|
p2aα,ω |
(p −аα,α ) aω ,δ kϑ kϑH |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
− |
|
|
|
|
z |
|
|
|
z |
в |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
∆САУН (p) |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[(aα,ω |
aH,α + aϑ,ω |
aH,ϑ)p |
−aϑ,ω aH,ϑ aα,α |
] aω ,δ kϑ kϑH |
|||||||||||||||||
− |
|
z |
|
|
|
|
z |
|
|
|
z |
|
|
|
|
|
z |
в |
|
|
||
|
|
|
|
|
|
|
|
|
∆САУН (p) |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆H |
|
|
|
|
|
|
|
|
p2 |
(BСАУН p + BСАУН ) |
|
|
|
|
|
||||||
W |
|
зад |
(p) = |
|
|
|
|
|
|
|
3 |
|
|
2 |
|
|
|
|
|
, |
|
|
|
p4 + AСАУН p3 |
+ AСАУН p2 |
+ AСАУН p + AСАУН |
|
||||||||||||||||||
∆ωz |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
3 |
|
|
|
2 |
|
|
1 |
|
|
|
0 |
|
|
||
(10.18) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
∆H |
|
|
|
|
|
|
|
|
|
|
B |
САУН |
p |
2 |
|
|
|
|
|
|
|
W |
зад |
(p) = |
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
, |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
∆α |
|
|
|
p4 + AСАУН p3 |
+ AСАУН p2 |
+ AСАУН p + AСАУН |
|
|
||||||||||||||
|
|
|
|
|
|
|
3 |
|
|
|
2 |
|
|
1 |
|
|
|
0 |
|
|
||
Определитель матрицы
φпктСАУН (p) |
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
,δ kϑkϑH |
|
|||
|
(p −aω |
,ω |
−aω |
,δ |
kω |
) |
−aω ,α |
|
−aω |
|
,δ kϑ |
−aω |
|
||||||||||
|
|
|
|
||||||||||||||||||||
|
|
z |
|
z |
|
z |
в |
|
z |
|
|
|
|
z |
|
|
z |
в |
|
z |
в |
|
|
= |
|
|
|
−aα,ω |
|
|
|
|
(p −aα,α ) |
|
|
0 |
|
|
0 |
= |
|||||||
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−aϑ ,ω |
|
|
|
|
|
|
|
0 |
|
|
|
p |
|
|
0 |
|
||||
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
−aH,α |
|
−aH,α |
|
|
p |
|
||||||
= p4 + AСАУН p3 + AСАУН p2 + AСАУН p + |
|
|
|
|
|
|
|||||||||||||||||
|
|
3 |
|
|
|
|
|
2 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
+A0САУН = ∆САУН (p) , A3САУН |
= A2АПϑ = 2hкДТ , |
|
|
|||||||||||||||||||
|
A |
САУН |
= A |
АПϑ |
= |
ДТ |
) |
2 |
−а |
|
a |
|
|
k |
|
, |
|
|
|||||
|
2 |
|
|
|
|
|
(ω |
|
|
|
ϑ |
|
ϑ |
|
|
||||||||
|
|
|
|
1 |
|
|
|
к |
|
|
|
|
ωz ,δв |
,ωz |
|
|
|
||||||
A1САУН = A0АПϑ −aωz ,δв aα ,ωz aH,αkϑ kϑH − −aωz ,δв aϑ ,ωz aH,ϑ kϑ kϑH =
= aωz ,δв kϑ (aϑ ,ωz aα,α −aα ,ωz aH,αkϑH − aϑ ,ωz aH,ϑ kϑH ) , AСАУ0 Н = aωz ,δв aϑ ,ωz aH,ϑ aα,αkϑ kϑH ,
{φСАУпкт Н (p)}пр - присоединенная матрица.
|
|
Так как вектор входа по управляющим воздействиям Bпкту со- |
|||||||||||||||||||||||||||||
держит только один ненулевой элемент |
|
aω ,δ |
в |
, определим в присое- |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
||
диненной матрице {φСАУН |
(p)} |
|
только первый столбец: |
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
пкт |
|
|
пр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
2 |
(p −аα |
|
α ) |
|
p |
2 |
aα |
,ω |
|
|
|
|
p |
2 |
aα ,ω |
|
(p − pα,α ) |
|||||||
|
|
|
|
|
|
p |
|
, |
|
|
|
|
|
|
|
|
z |
||||||||||||||
{φпктСАУН (p)}прТ = |
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
||||||||
|
∆САУН (p) |
|
|
∆САУН (p) |
|
|
|
|
∆САУН (p) |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[(a |
α ,ωz |
a |
H,α |
+ a |
|
|
a |
H,α |
)p −a |
|
|
a |
H,ϑ |
a |
α,α |
] |
|
|
|
|
|
||||||||||
|
|
|
|
ϑ ,ωz |
|
|
|
|
ϑ,ωz |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
||
|
|
|
|
|
|
∆САУН (p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вектор передаточных функций имеет вид
(10.19) |
|
|
|
|
|
|
|
|
|
||
|
∆H |
|
|
p(BСАУН p + BСАУН ) |
|
|
|||||
W |
|
зад (p) = |
|
|
|
3 |
|
|
2 |
|
, |
|
|
|
|
|
|
|
|
|
|||
∆ϑ |
|
p4 + AСАУН p3 |
+ AСАУН p2 |
+ AСАУН p + AСАУН |
|||||||
|
|
|
3 |
|
|
|
2 |
|
1 |
0 |
|
(10.20) |
|
|
|
|
|
|
|
|
|
||
|
∆H |
|
|
|
BСАУН p + BСАУН |
|
|
||||
W |
|
зад (p) = |
|
|
|
1 |
|
|
0 |
|
, |
|
p4 + AСАУН p3 |
+ AСАУН p2 |
|
|
|||||||
∆Н |
|
+ AСАУН p + AСАУН |
|||||||||
|
|
|
3 |
|
|
|
2 |
|
1 |
0 |
|
(10.21) |
|
|
|
|
|
|
|
|
|
||
|
где BСАУН (p) = −a |
ωz ,δв |
k |
ϑ |
kH , |
BСАУН (p) = |
|
|
|||
|
|
3 |
|
|
ϑ |
2 |
|
|
|
||
=aωz ,δв aα,αkϑ kϑH , B1САУН (p)=
=−(aα,ωz aH,α + aϑ ,ωz aH,ϑ)aωz ,δв kϑ kϑH ,
BСАУ0 Н (p) = aϑ ,ωz aH,ϑ aωz ,δв aα,αkϑ kϑH ,
BСАУ4 Н (p) = aωz ,δв aα ,ωz kϑ kϑH .
Сворачивая структурную схему замкнутой системы “самолет - САУН ” (рис. 10.11) методами структурных преобразований, можно получить передаточную функцию (10.21).
Рассмотрим условия устойчивости замкнутой системы “самолет - САУН ” по критерию Гурвица:
|
САУН |
= 2h |
ДТ |
> 0 , |
|
|
|
|
|
|
||
A3 |
к |
|
|
|
|
|
|
|||||
A |
САУН |
= (ω |
ДТ |
3 |
−a |
|
a |
|
k |
|
> 0 , |
|
2 |
|
) |
|
ωz ,δв |
ϑ ,ωz |
ϑ |
||||||
|
к |
|
|
|
|
|
|
|||||
A1САУН = aωz ,δв kϑ (aϑ ,ωz aα ,α −aα ,ωz aH,αkϑH −
−aϑ ,ωz aH,αkϑ ,H ) > 0 ,
AСАУ0 Н = aωz ,δв aϑ ,ωz aH,ϑ aα,αkϑ kϑH > 0 ,
A3САУН AСАУ2 Н − A1САУН > A3САУН AСАУ2 Н A1САУН − −(A1САУН )2
−(A3САУН )2 AСАУ0 Н > 0 . (10.22)
72 |
май 2003г. |
В.Г.Воробьев, С.В.Кузнецов АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ПОЛЕТОМ САМОЛЕТОВ
Правильным выбором передаточных коэффициентов kωz , kϑ , kϑH добиваются выполнения условий (10.22), а также обеспечиваются требуемые запасы устойчивости.
Рассмотрим реакцию системы “самолет - САУН ” на ступенчатое
отклонение пилотом рукоятки задатчика высоты. После окончания переходных процессов приращения установившихся значений параметров продольного короткопериодического движения примут нулевые значения:
(∆ω ) |
уст |
= lim[p∆H |
зад |
(p)W∆Hзад (p)] = 0 , |
|
|
||||||||||
|
|
|
z |
p→0 |
|
|
|
|
∆ ω |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
∆α |
уст |
= lim[p∆H |
зад |
(p)W |
∆Hзад (p)] = 0 , |
|
|
|||||||||
|
|
|
|
|
p→0 |
|
|
∆ α |
|
|
|
|||||
∆ϑ |
уст |
= lim[p∆H |
зад |
(p)W |
∆Hзад (p)] = 0 |
|
|
|||||||||
|
|
|
|
p→0 |
|
|
∆ ϑ |
|
|
|
||||||
и произойдет формирование нового установившегося значения |
||||||||||||||||
высоты |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆Н |
уст |
= lim[p∆H |
зад |
|
(p)W∆Hзад (p)] = |
|
|
|||||||||
|
|
|
|
|
|
p→0 |
|
|
|
|
∆ Н |
|
|
|
||
p∆H |
|
|
|
|
(BСАУН p + BСАУН ) |
|
|
|||||||||
= lim |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
0 |
|
= |
|
|
p |
|
|
(p4 + AСАУН p3 + AСАУН p2 |
|
|
|||||||||
p→0 |
|
|
|
+ AСАУН p + AСАУН ) |
||||||||||||
|
|
|
|
|
|
3 |
|
|
|
|
|
2 |
1 |
0 |
|
|
BСАУН
= A0САУН ∆Hзад ∆Нзад.
0
Переходный процесс по высоте определяется переходной функци-
ей
∆H |
(BСАУН p + BСАУН ) |
|
|
||
∆Н(p) = p |
|
1 |
0 |
|
. |
(p4 + AСАУН p3 |
+ AСАУН p2 |
+ AСАУН p + AСАУН ) |
|||
|
3 |
2 |
1 |
0 |
|
(10.23)
Привести (10.23) к табличному виду затруднительно. Поэтому для получения переходного процесса целесообразно использовать ЭВМ.
Реакция замкнутой системы “самолет - САУH ” на внешние
возмущения.
Рассмотрим модель вынужденного продольного движения самолета, управляемого САУH , при наличии внешних возмущений:
xпкт (t) = Aпктxпкт (t) +Bпкту uпкту (t) + Bпктв uпктв (t) , (10.24) yпкт(t) = xпкт (t) , (10.25)
uпкту (t) = ∆δвСАУН (t) , (10.26) δСАУв Н (t) = DСАУпкт Н yпкт(t) , (10.27)
где вектор входа uпктв |
(t) и матрица входа Bпктв |
определяются |
выражениями (3.148) и (3.149).
Получим матрицу передаточных функций замкнутой системы “самолет - САУH ” по параметрам продольного короткопериодического и траекторного движения самолета на внешние возмущения
Wпктв (p) = Yпктв (p) = Uпкт(p)
= (Ip − Aпкт −Bпкту DпктСАУН )−1Bпктв = ФСАУпкт Н (p)Bпктв . (10.28)
Определим в качестве примера вектор передаточных функций на внешний момент тангажа ∆mzв :
W∆mzв (p) = |
p2 |
(ССАУН p + ССАУН ) |
|
|
|
|
3 |
2 |
|
, |
|
p4 + AСАУН p3 |
+ AСАУН p2 |
|
|
||
∆ωz |
+ AСАУН p + AСАУН |
||||
|
3 |
2 |
1 |
0 |
|
(10.29) |
|
|
|
|
|
W∆mzв (p) = |
|
ССАУН p2 |
|
|
|
|
4 |
|
|
, |
|
|
|
|
|
||
∆α |
p4 + AСАУН p3 |
+ AСАУН p2 |
+ AСАУН p + AСАУН |
||
|
3 |
2 |
1 |
0 |
|
(10.30) |
|
|
|
|
|
W∆mzв |
|
(p) = |
|
|
|
|
|
|
|
|
|
p(C3САУН p + CСАУ2 Н ) |
|
|
, |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
∆ϑ |
|
|
|
|
|
|
|
|
p4 + AСАУН p3 + AСАУН p2 |
+ AСАУН p + AСАУН |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
2 |
|
|
1 |
0 |
|
|
(10.31) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W∆mzв |
|
(p) = |
|
|
|
|
|
|
|
|
|
С1САУН p + ССАУ0 Н |
|
|
, |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
∆Н |
|
|
|
|
|
|
|
|
p4 + AСАУН p3 + AСАУН p2 |
+ AСАУН p + AСАУН |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
2 |
|
|
1 |
0 |
|
|
(10.21) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ССАУ4 Н (р) = −aωz ,mzв aϑ ,ωz aα ,ωz , |
|||||||||||
C3САУН (p) = −aωz ,mzB , CСАУ2 |
Н (p) = |
|
|
|
|
|||||||||||||||||||||
= a |
ωz |
|
a |
α,α |
, |
CСАУН (p) = |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
,δв |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
||||||||
−(aα,ωz aH,α +aϑ ,ωz aH,ϑ) aωz ,mzв , |
|
C0САУН (p) = |
|
|
|
|||||||||||||||||||||
aω ,m |
zв |
|
aϑ ,ω aH,ϑ . |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
z |
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рассмотрим реакцию системы на ступенчатый внешний момент |
||||||||||||||||||||||||||
тангажа |
|
|
|
∆mzв(p) = ∆mzв / p . |
Тогда после окончания переходных |
|||||||||||||||||||||
процессов останется статическая ошибка по высоте |
|
|
|
|||||||||||||||||||||||
∆Н |
уст |
= lim[p∆m |
zв |
(p)W∆mzв |
(p)] = |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
p→0 |
|
|
|
|
∆ Н |
|
|
|
|
|
|
||||||||
|
p∆m |
zв |
|
|
|
|
|
|
|
|
(ССАУН p +ССАУН ) |
|
|
|||||||||||||
= lim |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
0 |
|
= |
|||||
|
|
|
|
|
p |
|
|
|
(p4 + AСАУН p3 + AСАУН p2 |
+ AСАУН p + AСАУН ) |
||||||||||||||||
p→0 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
2 |
|
|
1 |
0 |
|
|
|
|
ССАУН |
|
|
|
|
|
|
|
aω ,m |
zв |
|
|
|
|
|
|
|||||||||
= |
|
|
|
|
0 |
|
|
|
|
|
∆m |
zв |
= |
|
|
z |
|
|
≠ 0 . |
|
|
|
||||
A |
САУН |
|
|
aω |
|
|
H |
|
|
|
|
|||||||||||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
,δ kϑ kϑ |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
в |
|
|
|
|
|
|
|
|
|
Следовательно, САУH с законом управления (10.1) является статической по отношению к внешнему ступенчатому моментному возмущению по тангажу. Увеличение передаточного коэффициента kϑH способствует уменьшению величины статической ошибки.
Для доказательства астатизма законов управления САУH с изо-
дромной обратной связью в сервоприводе или интегральной составляющей по высоте можно провести аналогичное исследование.
10.2. АВТОМАТИЧЕСКАЯ СТАБИЛИЗАЦИЯ И УПРАВЛЕНИЕ БОКОВЫМ ТРАЕКТОРНЫМ ДВИЖЕНИЕМ НА МАРШРУТЕ
10.2.1. Системы автоматического управления боковым траекторным движением на маршруте
Принцип действия. При длительном полете в условиях действия бокового ветра самолет ”сносится” ветром с линии заданного пути. Этому не может препятствовать автопилот курса, который стабилизирует положение продольной оси самолета в горизонтальной плоскости. Для стабилизации самолета на ЛЗП необходимо стабилизировать не
продольную ось самолета, а положение вектора путевой скорости Vп .
Тогда продольная ось самолета должна быть развернута на встречу ветру на угол сноса.
Углом сноса βсн называется угол, заключенный между горизон-
G
тальной проекцией вектора воздушной скорости V и вектором путевой
скорости Vп . Он отсчитывается вправо (положительный βсн ) и влево
G
(отрицательный βсн ) от вектора V и определяется как отношение значения боковой составляющей ветра Wz к значению воздушной
скорости V: βсн = Wz  V .
V .
Система автоматического управления курсом с учетом угла сно-
са („АУΨβ ) обеспечивает стабилизацию и управление боковым тра-
екторным движением самолета в крейсерском полете путем отклонения элеронов при возникновении рассогласования между текущим и заданным значениями курса с учетом угла сноса.
Типовой закон управления САУ в режиме стабилизации и управления курсом с учетом угла сноса имеет вид:
73 |
май 2003г. |

Глава 10. УПРАВЛЕНИЕ ТРАЕКТОРНЫМ ДВИЖЕНИЕМ НА МАРШРУТЕ
δСАУэ Ψβ = kωx ωx + kγ (γ − γзад),
γзад = kγ (∆ψзк −βсн), ∆ψзк = ψкз −ψк . (10.33)
В состав системы входят (рис. 10.12) датчик угловой скорости крена ДУС, датчик угла крена - гировертикаль ГВ, датчик курса - курсовая система КС, задатчик курса ЗК, датчик угла сноса - доплеровский измеритель скорости и угла сноса ДИСС, формирователь рассогласования между текущим и заданным значениями курса с учетом угла сноса - пилотажно-навигационный прибор ПНП, формирователь приращения
заданного угла крена - вычислитель ВСАУ Ψβ , вычислитель автопило-
та ВАП γ , усилитель У и рулевая машина РМδэ .
Система работает следующим образом. Пусть до включения этого режима САУ работала в автопилотных режимах стабилизации курса или управления заданным курсом, как это было описано в параграфе 9.3. Продольная ось самолета удерживалась на ЛЗП, текущий курс
самолета равнялся заданному и uψк = uψзк . После включения режима
стабилизации курса с учетом угла сноса при появлении бокового ветра ДИСС вырабатывает сигнал, пропорциональный возникающему углу
сноса |
uβ |
сн |
. В |
результате ПНП формирует сигнал |
|||
|
|
|
|
|
|
|
|
u∆ψ |
зк |
= uψ |
зк |
− uψ |
к |
± uβ |
, который в вычислителе ВСАУ Ψβ пре- |
|
|
|
|
сн |
|||
образуется в сигнал uγзад , пропорциональный заданному углу крена.
Этот сигнал отрабатывается сервоприводом элеронов.
Самолет входит в крен, пропорциональный углу сноса, и под действием сигнала uγ с гировертикали элероны возвращаются в нейтральное положение. Самолет начинает разворачиваться в сторону действия ветра до тех пор, пока разность сигналов uψзк −uψк не
уравновесит сигнал uβсн . Тогда сигнал с ПНП станет равным нулю u∆ψзк = 0 и под действием сигнала с гировертикали uγ сервопривод
отклонит элероны в обратную сторону. Самолет выйдет из крена и продолжит прямолинейное движение без угла сноса.
Задача стабилизации самолета на ЛЗП в условиях близости радиомаяков может решаться с помощью соответствующих радиотехнических систем навигации (РТСН). Международная РТСН VOR обеспечивает непрерывное измерение азимута радиомаяка и самолета.
Азимутом маяка Ам называется угол, отсчитанный по часовой стрелке от северного направления магнитного меридиана до направления от самолета на маяк (рис.10.13). Азимутом самолета Ас называется угол, отсчитанный по часовой стрелке от северного направления магнитного меридиана до направления от маяка на самолет.
Система автоматического управления отклонением от заданного азимута ( САУ∆А ) обеспечивает стабилизацию и управление боко-
вым траекторным движением самолета в крейсерском полете путем отклонения элеронов при отклонении самолета от заданного азимута.
Закон управления САУ∆А в режиме стабилизации заданного
азимута имеет следующий вид:
δСАУэ ∆А = kωx ωx + kγ (γ − γзад), γзад = kψγ ∆ψзк + k∆γ А∆А− kβγсн βсн,
∆ψзк = ψзк −ψк, ∆А = Ам − Азад, (10.34)
где Ам, Азад - соответственно текущее и заданное значения
азимута маяка; ∆А - отклонение от заданного азимута; k∆γ А - переда-
точный коэффициент по углу крена к отклонению от заданного азимута, определяющий, каким углом крена должен компенсировать самолет
отклонение в один градус по азимуту; kβγсн - передаточный коэффициент по углу крена к углу сноса.
В состав электрогидравлической САУ∆А (рис.10.14) входят дат-
чик угловой скорости крена ДУС, датчик угла крена – гировертикаль ГВ, датчик курса – курсовая система КС, задатчик курса ЗК, датчик отклонения от заданного азимута – радиотехническая система навигации РТСН, датчик угла сноса – доплеровский измеритель скорости и угла сноса ДИСС, формирователь отклонения текущего курса от заданного – пилотажно-навигационный прибор ПНП, формирователь приращения заданного угла крена – вычислитель ВСАУ∆А, вычислитель автопилота с сумматором и усилителем сервопривода и рулевой агрегат
элеронов РАδэ .
Система работает следующим образом. Перед включением режима пилот вручную с помощью задатчика курса устанавливает заданный курс, а с помощью селектора азимута РТСН - заданный азимут линии пути. После включения режима стабилизации заданного азимута само-
лет разворачивается на заданный курс. При этом САУ∆А сначала работает как автопилот курса перекрестной схемы в режиме управления заданным курсом, а затем как САУψβ . Вектор путевой скорости
самолета совмещается с направлением линии заданного пути на радиомаяк.
При отклонении самолета от заданного азимута, определяющего ЛЗП, РТСН вырабатывает сигнал, пропорциональный этому отклоне-
нию u∆Α .
Вычислитель ВСАУ∆А формирует сигнал приращения заданного угла крена u∆γзад . Этот сигнал отрабатывается сервоприводом элеро-
нов, и самолет входит в крен, пропорциональный отклонению от заданного азимута. Под действием сигнала с гировертикали uγ элероны возвращаются в нейтральное положение. Самолет разворачивается в сторону ЛЗП до тех пор, пока сигнал u∆А c РТСН не станет равным нулю. Тогда под действием сигнала с гировертикали uγ сервопривод
отклоняет элероны в обратную сторону. Самолет выходит из крена и продолжает прямолинейное движение по ЛЗП.
Сигнал u∆ψзк , формируемый ПНП, выполняет функции демпфи-
рования траекторных колебаний самолета. Сигнал uβсн с ДИСС ком-
пенсирует действие бокового ветра и способствует управлению положением вектора путевой скорости относительно ЛЗП.
Задача стабилизации самолета на ЛЗП может решаться путем управления путевым углом с использованием навигационного вычисления. Вычислитель определяет в каждый момент времени заданный путевой угол ортодромии, соединяющей место нахождения самолета и заданный пункт маршрута.
74 |
май 2003г. |

В.Г.Воробьев, С.В.Кузнецов АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ПОЛЕТОМ САМОЛЕТОВ
Система автоматического управления путевым углом
( САУΨпу ) обеспечивает стабилизацию и управление боковым траек-
торным движением самолета в крейсерском полете путем отклонения элеронов при отклонении самолета от заданного путевого угла.
Закон управления САУ в режиме управления путевым углом имеет следующий вид:
δСАУэ Ψпу = kωx ωx + kγ (γ − γзад) ,
γзад = kψγ (Ψзпу −ψк −βсн) , (10.35)
где Ψзпу - заданный путевой угол.
Система автоматического управления путевым углом (рис.10.15) работает следующим образом. При включении навигационного вычислителя в режим полета по кратчайшему расстоянию он начинает фор-
мировать сигнал uΨзпу , пропорциональный заданному путевому углу.
Тогда САУΨпу отрабатывает сигнал как САУψβ . При этом вектор
путевой скорости, направленный вдоль траектории кратчайшего расстояния, обеспечивает стабилизацию центра масс на этой траектории.
При действии на самолет внешних возмущений он отклоняется от линии заданного пути (ЛЗП), так как не является устойчивым в боковом траекторном движении. Для стабилизации самолета на ЛЗП пилот, наблюдая за изменением бокового отклонения по прибору, воздействует на баранку штурвала и отклоняет элероны таким образом, чтобы самолет удерживался на ЛЗП или переходил с одной ЛЗП на другую. Системы автоматического управления боковым отклонением самолета от ЛЗП служат для освобождения пилота от необходимости ручной стабилизации и управления самолетом на траектории в горизонтальной плоскости.
Система автоматического управления линейным боковым откло-
нением самолета от ЛЗП ( САУz ) обеспечивает стабилизацию и
управление боковым траекторным движением самолета в крейсерском полете и во время предпосадочного маневра путем отклонения элеронов при возникновении линейного бокового отклонения самолета от ЛЗП.
Простейшая САУz реализует следующий закон управления эле-
ронами:
δСАУэ z = kωx ωx + kγ (γ − γзад) ,
γзад = −kzγz , (10.36)
где γ, γзад - соответственно текущее и заданное значения угла
крена; kzγ - передаточный коэффициент по углу крена на линейное
боковое отклонение, определяющий, на сколько должен измениться угол крена при появлении линейного бокового отклонения от ЛЗП в 1 м.
В состав аналоговой электромеханической CАУz (рис.10.16)
входят датчик угловой скорости крена ДУС, датчик угла крена - гировертикаль ГВ, датчик путевой скорости и угла сноса ДИСС, датчик курса - курсовая система КС, датчик воздушной скорости - система воздушных сигналов СВС, датчик положения самолета относительно наземного радиомаяка - радиотехническая система ближней навигации РСБН, навигационный вычислитель НВ бокового отклонения самолета
от ЛЗП, вычислитель заданного угла крена ВСАУz , вычислитель автопилота ВАПγ усилитель У и рулевая машина РМδэ .
CАУz работает следующим образом. Навигационный вычисли-
тель НВ, используя какой-либо метод счисления пути, непрерывно определяет координаты местоположения самолета в частноортодромической системе координат. При включении САУ в режим стабилизации
полета по ЛЗП на вход вычислителя ВСАУ z поступает сигнал uz , пропорциональный боковому отклонению самолета от ЛЗП. Вычислитель формирует сигнал uγзад , пропорциональный заданному углу кре-
на, который подается на сервопривод элеронов СПδэ и вызывает отработку вала рулевой машины. Отработка происходит до тех пор, пока сигнал обратной связи uжос не уравновесит на входе сумматора С
сигнал uγзад . Самолет изменит угол крена и под действием сигнала
текущего угла крена с гировертикали uγ сервопривод вернет элероны
в балансировочное положение. Самолет начнет разворачиваться в сторону ЛЗП с углом крена, пропорциональным боковому отклонению. Это отклонение будет уменьшаться, а вместе с ним будет уменьшаться
и сигнал uz с НВ. Равновесие сигналов uγ и uγзад нарушится, и
сервопривод будет отрабатывать элероны в обратную сторону. Самолет выходит из крена в тот момент, когда z = 0 .
Управление движением. Рассмотрим процесс устранения воздействия постоянного бокового ветра с помощью CАУψβ . В этом случае самолет войдет в крен, противоположный направлению ветра, с последующим разворотом его по курсу на угол ∆ψзк = βсн .. Статическая
погрешность стабилизации вектора путевой скорости на ЛЗП будет определятся моментом поперечной статической устойчивости самолета
Мxβ . В установившемся полете, когда угол сноса становится равным
углу скольжения |
βсн = −β, этот момент определяется следующим |
||||
образом: |
|
|
|
|
|
β |
|
ρV2 |
β |
ρV2 |
βсн . (10.37) |
Мxβ = mxS1 |
2 |
β = −mxS1 |
2 |
||
|
|
|
|
||
При этом самолет получает тенденцию к повороту продольной оси в направлении действия ветра. Для устранения этой тенденции
САУψβ должна отклонить элероны на определенный угол, чтобы компенсировать момент поперечной статической устойчивости:
δ |
ρV2 |
δэ = Мxβ . |
Мxδэ = mxэ S1 |
2 |
|
|
|
Отсюда можно определить с учетом (10.37) потребное отклонение элеронов
mβ
δэ = − mδxэ βсн .
x
Такое отклонение элеронов может быть обеспечено САУψβ со-
гласно закону управления (10.33) для установившегося режима
(δСАУэ ψβ )уст = kγkψγ к (ψзк −ψк −βсн).
Статическая погрешность стабилизации вектора путевой скорости
(ψзк −ψк −βсн)уст = |
(δСАУэ |
ψβ )уст |
≠ 0 . |
|
kγkψγ к |
||||
|
|
|||
Кроме того, в установившемся режиме должно соблюдаться условие nz = 0 . Тогда боковая сила Zβ , вызванная углом скольжения, должна быть скомпенсирована проекцией аэродинамической подъем-
75 |
май 2003г. |

Глава 10. УПРАВЛЕНИЕ ТРАЕКТОРНЫМ ДВИЖЕНИЕМ НА МАРШРУТЕ
ной силы, возникающей при крене |
Zγ = Ya sin γ . При этом потреб- |
Как видно из графиков, идеальный процесс устранения начального |
|||||||||||||||||||
ный угол крена самолета определяется из условия компенсации |
отклонения z имеет плавный апериодический характер. Качество рабо- |
||||||||||||||||||||
ты CАУz оценивается по времени окончания переходного процесса, |
|||||||||||||||||||||
|
|
|
|
|
ρV2 |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
β |
|
β = Zγ = |
|
|
полному отсутствию или малому значению перерегулирования по бо- |
||||||||||||||
Zβ = czS1 |
|
2 |
|
|
|
ковому отклонению. |
|
||||||||||||||
|
|
|
|
|
|
|
|
S1ρV2 |
|
|
|
|
Как следует из изложенного, для плавного вывода самолета на |
||||||||
= Y sin γ = c |
ya |
sin γ . |
ЛЗП принципиально необходимо присутствие в |
законе управления |
|||||||||||||||||
|
a |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
САУz сигнала, пропорционального углу крена. |
Отсутствие этого |
|||
Учитывая, что угол крена у при этом невелик, получим |
сигнала привело бы к тому, что в течение всего времени устранения |
||||||||||||||||||||
γ |
уст |
= |
сβz |
β = − |
cβz |
|
β |
cн |
. (10.39) |
отклонения от ЛЗП CАУz удерживала бы элероны в отклоненном в |
|||||||||||
|
|
|
|
одну сторону положении. Тогда при подходе к ЛЗП вектор скорости не |
|||||||||||||||||
|
|
сy |
|
|
|
|
|
cy |
|
|
|
|
|
|
|||||||
|
|
|
|
a |
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
совпадал бы с направлением ЛЗП и самолет проскочил бы ЛЗП. Про- |
||
Подставим (10.39) в закон управления (10.33) с учетом (10.38) |
цесс носил бы колебательный характер. Таким образом, сигнал угла |
||||||||||||||||||||
(δСАУψβ ) |
|
|
= −k |
|
|
cβz |
|
β |
|
+ |
крена в законе управления САУz служит для демпфирования боко- |
||||||||||
|
э |
|
|
уст |
|
|
|
|
γ |
cy |
|
|
|
cн |
|
вых траекторных колебаний самолета. |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для получения переходных процессов хорошего качества в закон |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|||
+kγkψγ к (ψзк −ψк −βсн) ≠ 0 . |
управления САУz дополнительно вводят сигнал, |
пропорциональный |
|||||||||||||||||||
Таким образом, САУψβ |
|
|
|
с законом управления (10.33) стабили- |
скорости линейного бокового отклонения z . Тогда приращение задан- |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сн |
|
|
|
ного значения угла крена определяется следующим образом: |
|||
зирует вектор путевой скорости на ЛЗП с некоторой статической ошиб- |
∆γзад = −kzγz −kzγz , (10.40) |
|
|||||||||||||||||||
кой, значение которой зависит от угла сноса. |
|
||||||||||||||||||||
Рассмотрим процесс устранения положительного начального ли- |
где kzγ - передаточный коэффициент по углу крена при изменении |
||||||||||||||||||||
нейного отклонения самолета от ЛЗП с помощью САУz (рис. 10.17). |
скорости линейного бокового отклонения. |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рассмотрим процесс устранения начального линейного отклонения
Будем считать, что в начальный момент времени t0 самолет летит без скольжения β=0, элероны находятся в нейтральном положении δэ(t0 ) = 0 . Отрицательное линейное боковое отклонение z в момент времени t1 при включении САУz начинает парироваться отклонени-
ем элеронов на отрицательный угол δэ(t1) . Положительный управ-
ляющий момент крена Мxδэ вызывает положительное приращение
углов крена и скольжения. В результате появляется положительное приращение боковой силы ∆Z, которая поворачивает вектор скорости в сторону ЛЗП. Траектория полета самолета искривляется.
Изменение угла скольжения вызывает появление отрицательного статического момента Мxβ , который в момент времени t2 , уравно-
вешивает управляющий момент Мxδэ . В результате суммарный мо-
мент крена Мx меняет знак и приращение угла крена уменьшается.
САУz в момент времени t3 возвращает элероны в нейтральное по-
ложение δэ(t3 ) = 0 и самолет прямолинейно приближается к ЛЗП.
Вследствие уменьшения значения z CАУz к моменту времени t4 отклоняет элероны в противоположную сторону на положительный угол δэ(t4 ) . Боковая сила меняет знак, и вектор скорости поворачи-
вается в горизонтальной плоскости. Постепенно САУz возвращает
элероны в нейтральное положение δэ(t5 ) = 0 , и самолет выходит на ЛЗП.
самолета от ЛЗП z с помощью CАУz , с пропорциональнодифференциальным управлением (10.40), представленный на рис. 10.18.
При включении САУ в момент времени t1 элероны отклоняются на отрицательный угол δэ(t1) , пропорциональный величине z . По-
ложительный управляющий момент крена Mxδэ , вызывает положи-
тельное приращение углов крена и скольжения. Самолет разворачивается в сторону ЛЗП и появляется скорость бокового отклонения z по-
ложительного знака. В момент времени t2 , когда установится равнове-
сие сигналов, пропорциональных z, z и ∆γ, CАУz вернет элероны в нейтральное положение δэ(t2 ) = 0 . Самолет с определенным углом крена продолжит разворот в сторону ЛЗП, увеличивая скорость z . К моменту времени t3 CАУz , отклонит элероны на положительный угол δэ(t3 ) и самолет будет выходить из крена.
Когда скорость отклонения z станет эквивалентна отклонению z, самолет выйдет из крена и элероны установятся в нейтральное положе-
ние δэ(t4 ) = 0 . Дальнейшее уменьшение z вызовет отклонение эле-
ронов на положительный угол δэ(t5 ) . Это приведет к крену самолета в сторону, противоположную ЛЗП. В момент времени t6 когда устано-
вится равновесие сигналов, пропорциональных z, z и ∆γ, CАУz
вернет элероны в нейтральное положение δэ(t6 ) = 0 .
Самолет с определенным углом крена разворачивается от ЛЗП, уменьшая скорость z . К моменту времени t7 , CАУz отклонит эле-
роны на отрицательный угол δэ(t7 ) и самолет будет выходить из крена. Плавное уменьшение сигналов, пропорциональных z, z и ∆γ,
76 |
май 2003г. |

В.Г.Воробьев, С.В.Кузнецов АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ПОЛЕТОМ САМОЛЕТОВ
вызовет отработку элеронов в нейтральное положение δэ(t8 ) = 0 .
Таким образом осуществляется s-образный апериодический вывод самолета на ЛЗП без перерегулирования. Рассмотрим процесс устране-
ния CАУz действия постоянного бокового ветра, представленный на рис. 10.19.
Первоначально самолет увеличивает угол скольжения на величину ∆βw = Wz / V0 . Самолет приобретает боковое ускорение по направлению ветра и его центр масс также начинает следовать по направлению ветра. CАУz отклоняет элероны пропорционально возникшему
рассогласованию z. Это создает отрицательное приращение угла скольжения и поворачивает вектор скорости самолета снова в горизонтальное положение. Одновременно происходит увеличение приращения углов крена и рыскания. Приращение угла скольжения становится равным нулю, а угол рыскания - равным приведенному к ветру углу
скольжения с обратным знаком - ∆βw . Изменение угла крена вызовет
сначала возвращение элеронов в нейтральное положение, а затем отклонение элеронов в противоположную сторону. По мере нарастания z элероны вновь будут возвращены в нейтральное положение. Таким
образом, CАУz с законом управления (10.36) является статической по
отношению к ступенчатому боковому ветру.
Если начальное боковое отклонение в момент включения режима стабилизации на ЛЗП превышает определенное значение zmax , то сигнал, пропорциональный z, будет ограничен определенным постоянным значением kzγzmax . Самолет войдет в крен, не превышающий
заданный, и будет разворачиваться в сторону ЛЗП до тех пор, пока
сумма сигналов от двух переменных управления z и z , имеющих при сближении с ЛЗП разные знаки, не станет равной нулю. Тогда самолет будет подходить к ЛЗП при нулевом угле крена с некоторым углом сближения
∆ψ = arcsin |
z |
= |
kzγzmax |
25 |
÷30 |
0 |
|
W |
kzγ |
W |
|
||||
|
|
|
|
|
|||
Когда самолет подойдет к ЛЗП на расстояние z ≤ zmax , сигнал по скорости сближения kzγz станет по абсолютному значению больше
сигнала kzγz и самолет войдет в обратный крен, постепенно прибли-
жаясь к ЛЗП.
Особенности законов управления. Режим автоматической стаби-
лизации и управления курсом с учетом угла сноса предусмотрен в сис-
теме САУ-62 (рис. 10.20).
Закон управления имеет следующий вид:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ψ |
|
|
|
|
|
|
|
|
|
|
|
δ |
э |
= k |
ω |
|
ω |
+ k |
γ |
γ − F |
kγзад |
|
|
γ |
зад |
, γ |
зад |
= F ∆ψ |
нпп |
, |
||||||||
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
x |
|
|
|
γ |
Тγρ+ |
1 |
|
|
∆ψ |
|
|||||||||
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
(10.41) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆ψнпп = |
|
|
|
1 |
|
|
(ψзк −ψк −βсн) , |
|
|
|
|
|
||||||||||||||
|
|
Тψρ+1 |
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
1, при γзад ≤ γ*зад; |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
F |
= |
|
γ |
* |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
γ |
|
|
зад |
|
, |
при |
γзад > γ*зад. |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
γ |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
зад |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
1 |
при |
ψнпп ≤ ∆ψ*нпп; |
|
|
|
|
|
|
|
|
|
|||||||||||||
F |
= |
|
* |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
∆ψ |
|
|
γ |
зад |
|
|
|
|
при |
|
∆ψнпп > ∆ψ*нпп. |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
γзад |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Аналогичным образом построена система САУ-86. Отличие заключается в схеме формирования заданного курса, в которой задатчик курса размещается на пульте управления. В качестве датчиков угла крена и курса используются инерциальная курсовертикаль (ИКВ) и базовая система курса и вертикали (БСКВ).
Режим автоматического управления отклонением от заданного азимута предусмотрен в системе САУ-154 (рис. 10.21).
Закон управления можно представить так:
δ |
э |
= k |
|
|
|
|
Tωx p |
ω |
x |
+ |
|
|
|
|
|
|
|
|
|
|
|
|||||||
ωx |
T |
|
p |
+1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
+k |
|
F |
|
|
F γ − F |
|
|
|
|
|
|
|
γ |
зад |
, (10.42) |
|||||||||||||
|
|
|
|
|
Тγp + |
|
|
|||||||||||||||||||||
|
|
γ |
∆γ |
|
γ |
|
|
γзад |
|
1 |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ψ |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
γзад |
= kγ |
|
|
|
(ψзк −ψк) + |
|
|
|
|
|
||||||||||||||||||
|
T p +1 |
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
ψ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+FA |
|
|
|
1 |
|
|
∆A + kβсн |
|
|
|
|
|
1 |
|
|
β |
сн |
, |
|||||||||
|
|
|
|
|
|
+1 |
|
Т |
|
p +1 |
||||||||||||||||||
|
|
|
γ T p |
|
|
|
|
|
|
γ |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
βсн |
|
|
|
|
|
|||
где |
|
F , |
F |
, |
|
F |
|
, |
|
FA |
- |
|
нелинейные звенья с насыщением, |
|||||||||||||||
|
|
|
γ |
|
|
|
∆γ |
|
|
γзад |
|
|
|
γ |
|
|
|
|
|
|
|
|
|
|
|
|||
обеспечивающие ограничение управляющих сигналов; Tψ , Tγ , TA ,
Tβсн - постоянные времени апериодических фильтров.
Закон управления системы САУ-62 в режиме автоматического управления путевым углом имеет следующий вид:
δ |
|
= k |
|
ω |
+ k |
|
|
γ − F |
kγ |
зад |
γ |
|
|
|||
э |
ω |
γ |
|
|
зад |
, |
||||||||||
|
|
|
||||||||||||||
|
|
|
x |
|
|
γ |
Тγp +1 |
|
|
|||||||
|
|
|
x |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
γзад = F∆ψ∆ψнпп , (10.43) |
|
|
|
|
|
|
||||||||||
∆ψнпп = |
|
|
1 |
|
|
(ψк − Ψзпу −βсн) . |
||||||||||
|
Тψp +1 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Чтобы не допустить формирования слишком больших управляющих воздействий на элероны при значительных отклонениях самолета
от ЛЗП, в законах управления САУz применяются ограничивающие
77 |
май 2003г. |

Глава 10. УПРАВЛЕНИЕ ТРАЕКТОРНЫМ ДВИЖЕНИЕМ НА МАРШРУТЕ
звенья с линейным ростом сигнала в рабочей зоне управления и насыщением за пределами этой зоны.
Кроме того, сигнал приращения заданного угла крена пропускается через высокочастотный апериодический фильтр с постоянной време-
ни Tγзад . Тогда составляющая закона управления САУz
γзад |
= |
|
1 |
|
[F(z) + F(z)] , (10.44) |
|||||
Тγ |
p +1 |
|||||||||
|
|
|
зад |
|
|
|
|
|
|
|
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
≤ z ; |
|
|
|
|
|
|
−kγz, z |
|
|
|
|||||
F(z) = |
|
|
|
, z > z |
|
|
; |
|||
|
|
−kz z |
max |
max |
||||||
|
|
|
γ |
|
|
|
||||
|
|
|
z |
|
|
|
|
|
|
|
F(z) |
|
−kγz , z ≤ zmax ; |
|
|
||||||
= |
|
|
|
, z>z |
|
|
. |
|
||
|
|
−kz z |
max |
max |
|
|||||
|
|
|
γ |
|
|
|
||||
Таким образом обеспечивается автоматическая стабилизация с по-
мощью САУ-154 (рис. 10.22).
Цифроаналоговые системы автоматического управления боковым траекторным движением самолета на маршруте. В совре-
менных цифровых пилотажно-навигационных комплексах формирование траектории полета в боковой плоскости осуществляется в вычислительной системе самолетовождения (ВСС). Эта система - задатчик угла крена. Формирование закона управления элеронами осуществляется в блоке вычислителя управления полетом БВУП (рис. 10.23). Датчиком угловой скорости крена, угла крена и боковой перегрузки является инерциальная система ИНС. В структурной схеме (см. рис. 9.22) на вход сумматора 1 в режиме полета по сигналам ВСС подается сигнал
заданного крена γзад .
10.2.2. Моделирование управления боковым траекторным движением на маршруте
Дополним модель быстрого бокового движения самолета уравнениями траекторного движения по углу рыскания и боковому отклоне-
нию. Пусть управляющее воздействие на элероны формирует САУz .
Тогда модель замкнутой системы «самолет- САУz » при наличии внешних возмущений можно определить следующим образом:
xбкт (t) = Aбктxбкт (t) + Bбкту uбкту (t) + +Bвбктuбктв (t) , (10.45)
yбкт(t) = xбкт (t) , (10.46) uбкту (t) = ∆δСАУэ z (t) , (10.47)
δСАУэ z (t) = DСАУбкт z yбкт(t) , (10.48)
∆ωx (t) |
||
|
|
|
∆ωy (t) |
||
|
∆β(t) |
|
где xбкт(t) = |
∆γ(t) |
, |
|
|
|
∆ψ(t) |
|
|
|
∆z(t) |
|
|
|
|
|
|
|
|
a |
ωx ,δэ |
|
|
|
|
|
|
∆fx (t) |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
0 |
|
|
|
|
|
|
|
∆Mxв(t) |
|
|
|
|
|
|
|||||||||
Βy |
= |
|
|
|
, uв |
(t) = ∆M |
ув |
(t) |
, |
|
|
|
|
|
|||||||||||
бкт |
|
0 |
|
|
|
|
бкт |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
∆βw (t) |
|
|
|
|
|
|
|
|||||||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
∆β |
|
|
(t) |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
w |
|
|
|
|
|
|
|
||||||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
a |
ω |
,ω |
|
|
|
|
0 |
|
aω ,β |
|
|
|
0 |
|
|
|
0 |
0 |
|
|
|
|||
|
|
x |
|
x |
|
|
aωy ,ωy |
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
0 |
|
|
|
aωy ,β |
|
|
|
0 |
|
|
|
0 |
0 |
|
|
|
|||||||
|
|
0 |
|
|
|
aβ,ωy |
aβ,β |
|
|
aβ,γ |
|
|
0 |
|
|
|
|
||||||||
Αбкт |
|
|
|
|
|
|
|
|
0 |
, |
|
||||||||||||||
= |
|
|
|
|
|
|
0 |
|
|
0 |
|
|
|
0 |
|
|
|
0 |
|
|
|||||
|
aγ,ωx |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
||||||||
|
|
0 |
|
|
|
a |
ψ,ωy |
|
0 |
|
|
|
0 |
|
|
|
0 |
0 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
0 |
|
|
|
|
0 |
|
a |
z,β |
|
|
|
0 |
|
|
a |
z,ψ |
0 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
aωx ,mxв |
|
|
|
0 |
|
|
|
|
aωx ,βw |
0 |
|
|||||||||
|
|
|
0 |
|
|
|
0 |
|
aωy ,mув |
|
aωy ,βw |
0 |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aβ,βw |
aβ,β |
|
|
||||
в |
(t) = |
aβ,fz |
|
|
0 |
|
|
|
|
0 |
|
|
|
|
|
, |
|||||||||
Βбкт |
|
0 |
|
|
|
0 |
|
|
|
|
0 |
|
|
|
|
|
|
0 |
|
0 |
|
w |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
0 |
|
|
|
0 |
|
|
|
|
0 |
|
|
|
|
|
|
0 |
|
0 |
|
|
|
|
|
|
|
0 |
|
|
|
0 |
|
|
|
|
0 |
|
|
|
|
|
|
0 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
DСАУz |
=[k |
ωx |
|
0 |
0 |
k |
γ |
0 |
|
k |
γ |
kz |
|
] . |
|
|
|
||||||||
|
бкт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
γ |
|
|
|
|
|
||||
Получим матрицу передаточных функций по параметрам бокового движения на внешние возмущения
Wбктв (p) = Yбкт (p) = Uбкт(p)
= (Ip − Aбкт −Bбкту DбктСАУz )−1Bбктв = ФСАУбкт z (p)Bвбкт .
где ΦCбктАУz (p) - переходная матрица состояния по параметрам бокового движения при включенной CАУz .
Таким образом, реакция самолета, управляемого CАУz , на внешние возмущения полностью определяется видом переходной матрицы
ΦCбктАУz (p) . Методика получения этой матрицы аналогична методике
получения соответствующих матриц для автопилотов угла крена и курса.
10.3. АВТОМАТИЧЕСКАЯ СТАБИЛИЗАЦИЯ И УПРАВЛЕНИЕ СКОРОСТЬЮ ПОЛЕТА НА МАРШРУТЕ
До последнего времени управление скоростью полета в основном осуществлялось через контур ручного управления, так как сравнительно медленный характер изменения скорости не вызывает затруднений у пилота. Кроме того, дозвуковые пассажирские самолеты обладают большим запасом устойчивости по скорости. Однако повышение требований к экономичности полета и точности выдерживания скорости на наиболее напряженных этапах полета привели к необходимости автоматической стабилизации и управления скоростью полета.
Для самолетов ГА различают следующие основные режимы полета: максимальной крейсерской скорости, максимальной дальности, экономический крейсерский режим. Выполнение этих режимов связано с управлением скоростью полета самолета.
78 |
май 2003г. |

В.Г.Воробьев, С.В.Кузнецов АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ПОЛЕТОМ САМОЛЕТОВ
Режим максимальной крейсерской скорости, определяемый с учетом ограничений по скоростям нормальной эксплуатации, применяется, когда отсутствуют ограничения по расходу топлива, а максимальная коммерческая нагрузка не ограничена взлетной массой или массой заправляемого топлива. Тогда крейсерские скорости близки к максимальным при нормальной эксплуатации.
Режим максимальной дальности используется в тех случаях, когда максимальная коммерческая нагрузка ограничена взлетной массой или заправляемым топливом, а также при полете на неоптимальных эшелонах. Этому режиму соответствуют числа М, при которых километровый расход топлива едва превышает (на 1%) минимальный. Тогда обеспечивается максимальная коммерческая нагрузка, а также достаточная устойчивость по скорости. Наивыгоднейшие числа М этого режима зависят от полетной массы и высоты эшелона. Экономический режим применяется, когда нет ограничений по максимальной коммерческой нагрузке. Этому режиму также соответствуют определенные оптимальные числа М. К факторам, влияющим на режимы крейсерского полета, относятся высота эшелона, температура наружного воздуха, направление и скорость ветра.
Благоприятное влияние автоматики на процесс управления полетом проявляется в улучшении качества переходных процессов возвращения самолета к требуемой скорости или требуемому числу М после непроизвольного отклонения под действием внешних возмущений. Так осуществляется автоматическая стабилизация скорости и числа М при наборе высоты, крейсерском полете и снижении.
Существуют два основных способа управления скоростью и числом М: воздействием на руль высоты и на тягу двигателей. В первом случае тангенциальное ускорение создается вследствие изменения аэродинамической силы лобового сопротивления, а во втором случае - изменением тяги.
Первый способ применяется обычно на маршруте. При этом путем изменения тяги двигателей обеспечивается требуемый режим изменения высоты: если тяга больше необходимой для горизонтального полета, набор высоты, меньше - снижение.
10.3.1. Системы автоматического управления скоростью и числом М полета на маршруте
Принцип действия. Самолет как объект управления, как правило, обладает статической устойчивостью в продольном траекторном движении по скорости при действии внешних возмущений. Однако возвращение самолета к исходному режиму по скорости может сопровождаться значительными статическими ошибками и существенной колебательностью. Кроме того, условиями эксплуатации самолета скорость ограничивается по максимуму и минимуму. Поэтому при полете на режимах, близких к граничным, скорость должна строго контролироваться. При ручном пилотировании задачи стабилизации и контроля за скоростью решает пилот. Он наблюдает за изменением скорости по указателю и, воздействуя на колонку штурвала, отклоняет руль высоты таким образом, чтобы самолет удерживал требуемую скорость или изменял ее соответствующим образом. Системы автоматического управления скоростью служат для освобождения пилота от решения этой задачи.
Система автоматического управления скоростью ( САУV )
обеспечивает стабилизацию и управление продольным движением самолета на начальном этапе набора высоты и заключительном этапе снижения путем отклонения руля высоты при возникновении рассогласования между значениями текущей и заданной скорости.
Принцип действия, устройство и работа САУV во многом ана-
логичны принципу действия, устройству и работе САУН . В состав
САУV (рис. 10.24) входят датчик угловой скорости тангажа ДУС,
датчик угла тангажа - гировертикаль ГВ, датчик рассогласования между значениями текущей и опорной скорости - корректор скорости КС,
вычислитель ВСАУV и сервопривод руля высоты СПδв .
Простейшая САУV реализует следующий закон управления ру-
лем высоты:
δСАУв V = kωz ωz + kϑ∆ϑ+ kV (V0 − V) , (10.49)
где δСАУв V - автоматическое отклонение руля высоты от балансировочного положения. ∆ϑ - приращение опорного угла тангажа ∆ϑ = ϑ−ϑ0 ; V ; V0 - соответственно текущее и опорное (в момент
включения режима) значения скорости; kV - передаточный коэффи-
циент по скорости, определяющий угол отклонения руля высоты при возникновении рассогласования между значениями текущей и опорной скорости в 1 км/ч.
Другими словами, отклонение руля высоты прямо пропорционально угловой скорости тангажа, приращению опорного угла тангажа и приращению скорости. Закон управления (10.49) можно также представить как закон управления автопилота угла тангажа, обеспечивающий формирование заданного угла тангажа пропорционально приращению скорости:
δСАУв V = kωz ωz + kϑ(∆ϑ− ∆ϑзад) ,
∆ϑ = ϑ−ϑ0 , ∆ϑзад = kϑV (V − V0 ) , (10.50)
где kϑV - передаточный коэффициент по скорости к углу тангажа.
САУV работает в двух режимах: согласования и стабилизации
скорости. В режиме согласования в корректоре скорости происходит непрерывное обнуление сигнала текущей скорости с помощью электромеханической следящей системы. Это происходит, когда система работает в автопилотном режиме стабилизации угла тангажа. Таким образом обеспечиваются запоминание текущей скорости и подготовка к
безударному включению САУV для стабилизации скорости.
Включение режима стабилизации скорости приводит к отключению следящей системы корректора. Тогда на его выходе формируется
сигнал разности u∆V , между опорным значением скорости, которую
имел самолет в момент включения режима стабилизации, и значением текущей скорости.
Если под действием внешних возмущений скорость полета меняется на величину ∆V = V − V0 , то сигнал u∆V , с КС поступает на вычислитель ВСАУV, где формируется сигнал, пропорциональный приращению заданного значения угла тангажа u∆ϑзад . Сервопривод
отрабатывает этот сигнал в перемещение руля высоты δСАУв V . Отклонение вала рулевой машины приводит к появлению сигнала
обратной связи uжос , который постепенно уравновешивает сигнал приращения заданного угла тангажа u∆ϑзад . Когда угол отклонения
руля высоты станет пропорциональным рассогласованию ∆V , руль остановится. Отклонение руля высоты вызовет появление управляюще-
го аэродинамического момента тангажа Мzδв , противоположного по
знаку возмущению, вызвавшему рассогласование ∆V . Под действием этого момента самолет начинает изменять угол тангажа. С гироверти-
кали подается сигнал uϑ , пропорциональный изменению угла тангажа.
Этот сигнал преобразуется в механизме согласования в сигнал u∆ϑ ,
под действием которого сервопривод начинает отрабатывать руль высоты в обратную сторону. Когда сигнал приращения текущего угла
тангажа uϑ сравняется с сигналом приращения заданного угла танга-
жа u∆ϑзад , руль высоты вернется в исходное балансировочное поло-
жение.
Изменение угла тангажа вызовет изменение силы лобового сопротивления ∆Χa , что в свою очередь приведет к изменению скорости самолета таким образом, что она начнет приближаться к опорному значению. Тогда сигнал u∆V , будет уменьшаться, а вместе с ним и
сигнал u∆ϑзад . Равновесие сигналов u∆ϑ и u∆ϑзад вновь нарушится,
и их разность поменяет знак. Сервопривод будет отрабатывать руль высоты в противоположную от балансировочного положения сторону. Руль высоты остановится, когда сигнал обратной связи уравновесит
разность сигналов (u∆ϑ − u∆ϑзад ) .
79 |
май 2003г. |
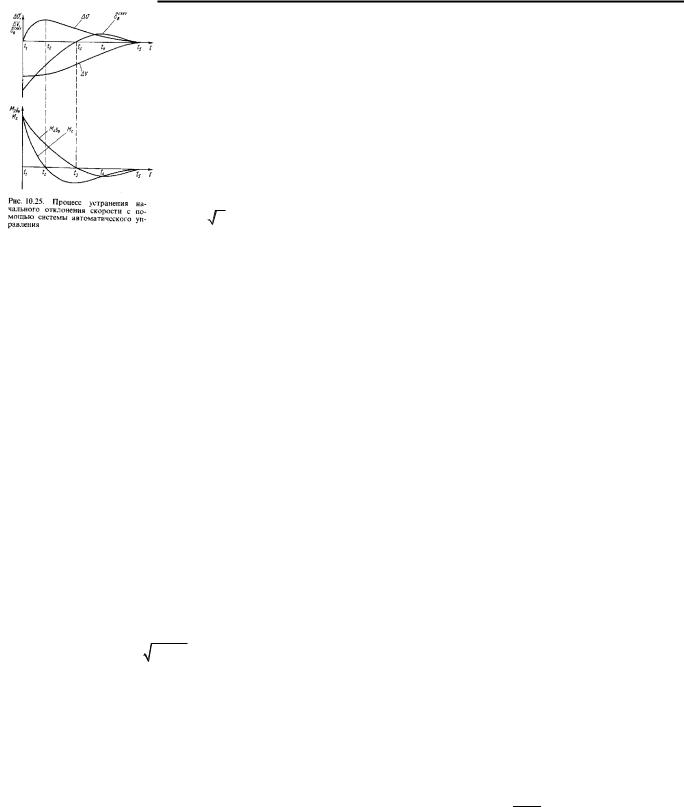
Глава 10. УПРАВЛЕНИЕ ТРАЕКТОРНЫМ ДВИЖЕНИЕМ НА МАРШРУТЕ
Управляющий аэродинамический момент тангажа Мzδв поменя-
ет знак, и самолет начнет уменьшать угол тангажа. Сигналы u∆V , u∆ϑ и u∆ϑзад постепенно установятся равными нулю. Тогда под дей-
ствием сигнала обратной связи uжос сервопривод вернет руль высоты
в балансировочное положение. При этом текущая скорость самолета будет равна опорной скорости. Режим управления скоростью от задат-
чика в САУV не используется.
Оптимальное управление самолетом связано с минимизацией удельного километрового расхода топлива, который зависит от условий полета. С изменением температуры воздуха меняется удельный расход топлива и число М вследствие изменения скорости звука, хотя скорость может выдерживаться постоянной. Известно, что удельный расход и
скорость звука меняются пропорционально T . Поэтому оказывается целесообразным задавать удельный расход топлива в функции числа М
ивыдерживать в полете заданное число М, а не воздушную скорость. Тогда удельный расход топлива и режим работы двигателей остаются неизменными при изменении температуры. Воздушная скорость при этом является переменной. Для автоматизации решения этой задачи предусмотрен соответствующий режим работы САУ.
Система автоматического управления числом М полета (САУМ)
обеспечивает стабилизацию и управление продольным движением самолета на заключительном этапе набора высоты, крейсерском полете по маршруту и начальном этапе снижения путем отклонения руля высоты при возникновении рассогласования между значениями текущего
изаданного числа М полета.
Простейшая САУМ, реализует следующий закон управления рулем высоты:
δСАУв М = kωz ωz + kϑ∆ϑ+ kМ (М0 − М) , (10.51)
где δСАУв М - автоматическое отклонение руля высоты от баланси-
ровочного положения с помощью САУМ, М , М0 , соответственно
текущее и опорное значения числа М полета; kМ - передаточный ко-
эффициент по числу М.
Принцип действия, устройство и работа САУМ аналогичны САУV. Отличие заключается в том, что в качестве датчика рассогласования между значениями текущего и опорного числа М используется корректор КМ.
Управление движением. Следует помнить, что действующие на самолет силы и моменты зависят от воздушной скорости полета. Разли-
чают истинную воздушную скорость V, индикаторную скорость Vин ,
и приборную Vпр . Истинная воздушная скорость - это скорость пере-
мещения самолета относительно воздушных масс. Индикаторная скорость связана с истинной воздушной скоростью через относительную
плотность воздуха: Vин = V ρн / ρ0 . Приборная скорость отлича-
ется от индикаторной на значение аэродинамических и инструментальных поправок, а также поправок на сжимаемость воздуха.
Знание истинной воздушной скорости необходимо для определения путевой скорости Vп , и решения задач навигации. Ограничения на
режимы полета накладываются по индикаторной скорости. Автоматическое управление самолетом осуществляется по приборной скорости.
Качество работы САУV и ее влияние на процесс управления
продольным движением оценивают по качеству переходных процессов управления скоростью. Рассмотрим процесс устранения начального
отклонения скорости ∆V = V0 − V с помощью САУV , представленный на рис. 10.25.
Появление рассогласования по скорости ∆V в момент времени t1 начинает парироваться САУV отклонением руля высоты на угол
∆δв1 . Изменение угла атаки вызывает появления статического момен-
та Мzα , который в момент времени t2 уравновесит управляющий момент Mzδв . Поэтому суммарный момент тангажа Мz меняет знак
и угол тангажа перестает расти. Тогда САУV в момент времени t3 возвращает руль высоты к исходному балансировочному положению.
Управляющий момент тангажа Mzδв |
вызовет отклонение вектора |
|
G |
результирующей аэродинамической силы |
Ra . Ее проекция на ось |
OXa - сила лобового сопротивления изменится, а вслед за этим изме-
нится величина тангенциальной перегрузки ∆nxa . Это приведет к изменению воздушной скорости самолета и уменьшению рассогласования ∆V. Поэтому в момент времени t4 САУV отклоняет руль высо-
ты в противоположную сторону на угол ∆δв4 . Приращение угла тангажа и тангенциальной перегрузки уменьшается и к моменту времени
t5 |
САУV устанавливает руль высоты в балансировочное |
положение ∆δв . Самолет выходит на опорную скорость V0 , а вектор
скорости принимает исходное положение.
Как видно из графиков, процесс устранения начального отклонения V0 имеет плавный апериодический характер, что обеспечивается
наличием в законе управления сигнала, пропорционального углу тангажа. Отсутствие этого сигнала привело бы к тому, что при подходе к опорной скорости ее вектор не принял бы исходного положения. Самолет проскочил бы значение опорной скорости, и процесс стабилизации стал бы колебательным и, может быть, неустойчивым. Таким образом,
сигнал угла тангажа в законе управления САУV служит для демпфи-
рования длиннопериодических колебаний самолета по скорости.
Особенности законов управления. Для дополнительного улуч-
шения демпфирования этих колебаний в закон управления САУV
включается сигнал, пропорциональный воздушному ускорению производной воздушной скорости:
∆ϑзад = kV ∆V + kV ∆V , (10.52)
где kV - передаточный коэффициент по производной воздушной
скорости, определяющий, на сколько градусов должен измениться угол тангажа самолета при изменении скорости на 1 км/ч/с.
Процесс устранения САУV внешних моментных возмущений аналогичен рассмотренному в параграфе 10.1 процессу с участием САУV . Для устранения статических ошибок в закон управления
САУV вводится сигнал, пропорциональный интегралу отклонения скорости по времени (рис. 10.26):
∆ϑзад = kV∆V + kV ∆V + k∫∆pV ∆V , (10.53)
где k∫∆V - передаточный коэффициент по интегралу изменения скорости.
80 |
май 2003г. |